一种园林植被美化用修剪装置
本发明涉及园林植被美化用修剪装置,特别涉及一种园林植被美化用修剪装置。
背景技术:
1、在对园林绿植美化修剪过程中,例如对大叶黄杨、小叶黄杨等常见绿化带植物进行美化修剪过程中,就需要用到修剪装置定期对植被进行修剪,中国专利cn114009235b公开的一种园林绿化用植被修剪装置,包括动力臂、切割刀、楔形块和驱动机构,两个所述动力臂相互铰接,所述切割刀的中部铰接在所述动力臂的首端,所述楔形块滑动连接在所述动力臂的首端,所述楔形块沿着所述动力臂滑动时推动所述切割刀转动,所述动力臂的末端设有所述驱动机构,所述驱动机构用于驱动所述楔形块沿着所述动力臂滑动,中国专利cn217657220u公开的一种自动避障广角修剪装置,包括车体机构,所述车体机构上布置有自动避障联动机构与旋转机构,旋转机构上还连接有倾转平台,倾转平台通过三段式机械臂与修剪头机构连接,车体机构在地面上行进通过修剪头机构对花卉园林进行修剪,通过自动避障联动机构中的收集槽机构对修剪下来的枝叶进行收集。
2、然而现有的园林植被美化用修剪装置在使用时存在一些弊端,比如:
3、现有的修剪装置为简易的剪刀结构,在实际使用过程中仍然需要人工进行操作,使用修剪装置手动对园林植被进行修剪,现有的修剪装置或者为自动修剪装置,虽然能够实现自动修剪,但是无法选择修剪样式,同时在实际修剪过程中,只能进行球形修剪,且修剪尺寸相对固定,无法修剪出具体形态结构,为此,我们提出一种园林植被美化用修剪装置。
技术实现思路
1、有鉴于此,本发明的目的在于提出一种园林植被美化用修剪装置,以解决现有的修剪装置仍然需要人工操作的问题以及自动修剪装置修剪形态单一的问题。
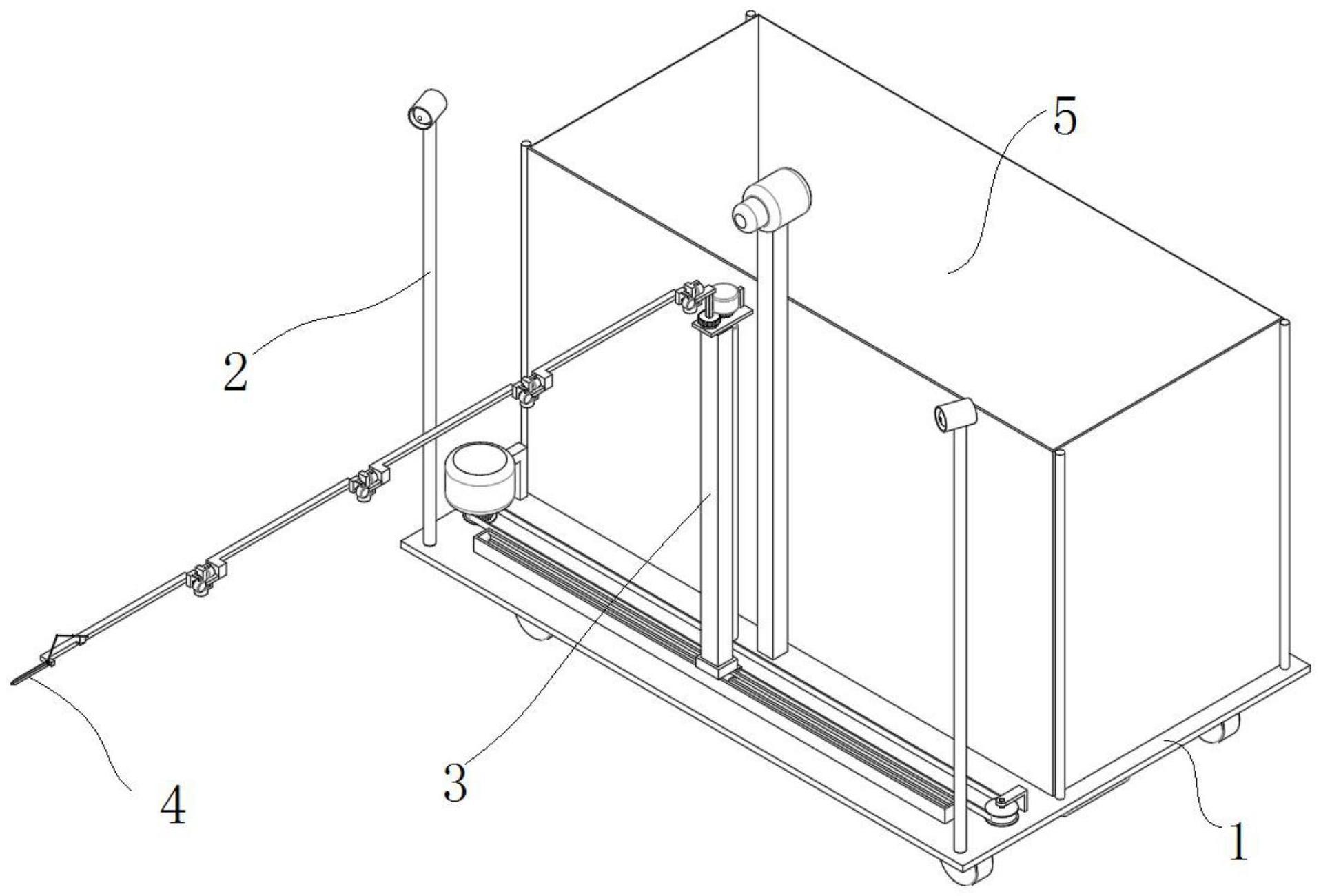
2、基于上述目的,本发明提供了一种园林植被美化用修剪装置,包括修剪装置以及用于控制修剪装置的控制系统,所述修剪装置包括移动底座,所述移动底座上设有智能组件以及驱动组件,所述驱动组件上设有修剪组件;
3、所述驱动组件包括滑轨、滑块、伸缩柱、支撑座以及四个三轴转向臂,所述滑轨设置在所述移动底座一侧上部,所述滑块在所述滑轨内部横向滑动,所述伸缩柱下部的固定端与所述滑块上端连接,所述伸缩柱上部的伸缩端顶部与所述支撑座下表面连接,所述支撑座上表面通过轴承连接有驱动转轴,其中一个所述三轴转向臂端部与所述驱动转轴上端连接,四个所述三轴转向臂依次连接,所述修剪组件固定设置在最外端三轴转向臂端部;
4、所述移动底座上部固定设有第一电机以及活动设有两个齿轮环,所述第一电机输出端与其中一个齿轮环连接,两个所述齿轮环上活动连接有齿轮带,所述滑块侧部与所述齿轮带侧壁连接,所述齿轮带驱动所述滑块横向滑动,所述支撑座上表面设有第二电机,所述第二电机与所述驱动转轴之间通过两个相互啮合的齿轮传动连接;
5、所述智能组件包括设置在所述移动底座底部的控制器以及相对设置在所述移动底座上端侧部的立杆,所述立杆端部设有采集摄像头,所述移动底座上端设有竖杆,所述竖杆位于两个所述立杆之间,所述竖杆上设有数字光栅投射器,所述控制器与所述驱动组件、移动底座、所述第一电机、所述第二电机、所述修剪组件以及四个所述三轴转向臂电性连接;
6、所述控制器内运行有控制系统,所述控制系统包括录入单元、成像单元、处理单元以及驱动单元,所述录入单元通过使用u盘在所述控制器内部录入多个三维样式模型,并通过所述控制器选择需要修剪的三维样式模型,所述成像单元首先通过所述数字光栅投射器以及两个所述采集摄像头拍摄园林绿植的数字图像,然后通过数字图像合成得到绿植的三维图像,所述处理单元通过对比三维样式模型与三维图像,最后所述处理单元生成驱动信号,所述驱动单元根据驱动信号控制所述驱动组件以及修剪组件对园林绿植进行自动修剪。
7、进一步地,所述修剪装置还包括收集组件,所述收集组件包括设置在所述移动底座上的收集网箱,所述收集网箱位于所述滑轨一侧。
8、进一步地,所述移动底座包括两个驱动后轮以及两个转向前轮,所述控制器控制所述移动底座向前移动以及转向。
9、进一步地,所述伸缩端在所述固定端内部上下滑动,所述固定端侧壁设有第一电动伸缩杆,所述第一电动伸缩杆上部输出端与所述支撑座下表面连接。
10、进一步地,所述修剪组件包括设置在最外侧的所述三轴转向臂的端部的剪刀以及第二电动伸缩杆,所述第二电动伸缩杆输出端与所述剪刀上其中一个刀把连接。
11、进一步地,所述三轴转向臂包括第一杆,所述第一杆端部活动设有第一转轴,所述第一转轴上端设有第二杆,所述第二杆下端设有第二转轴,所述第二转轴端部设有第三杆,所述第三杆端部设有第三转轴,所述第三转轴端部设有长杆。
12、进一步地,所述第一杆、所述第二杆以及所述第三杆上均设有驱动伺服电机,三个所述驱动伺服电机输出端分别与对应的第一转轴、第二转轴以及第三转轴端部连接,且所述第一转轴、所述第二转轴以及所述第三转轴相互垂直。
13、进一步地,最内侧所述三轴转向臂中的第一杆端部与所述驱动转轴上端连接,最外侧所述三轴转向臂中长杆端部与所述修剪组件连接。
14、进一步地,所述成像单元合成绿植的三维图像的过程如下,首先数字光栅投射器向园林绿植投射多幅等距的正弦光栅图像,由于园林绿植的复杂表面,光栅图像产生相应变形,获得的图像光强与相位函数,对采集到的变形光栅图像进行解相获取每个空间点的相位值,对获取的周期性相位值选择三频外差法进行相位的展开,最后以相位值作为特征值,从左侧采集摄像头机图像上坐标为p的点出发,通过极线和级次混合约束寻找右侧采集摄像头的对应的匹配点r根据立体视觉原理,借助相机标定获得投影矩阵在左侧采集摄像头以及右侧采集摄像头相机坐标系下方向的坐标矩阵,最终求解得到世界坐标系下的p坐标,最终完成三维图像拟合,并输出绿植的三维图像。
15、与现有技术相比,本发明具有如下有益效果:
16、本发明中,所述控制器内运行有控制系统,所述控制系统包括录入单元、成像单元、处理单元以及驱动单元,所述录入单元通过使用u盘在所述控制器内部录入多个三维样式模型,并通过所述控制器选择需要修剪的三维样式模型,所述成像单元首先通过所述数字光栅投射器以及两个所述采集摄像头拍摄园林绿植的数字图像,然后通过三维图像合成得到绿植的三维图像,所述处理单元通过对比三维样式模型与三维图像,最后所述处理单元生成驱动信号,所述驱动信号控制所述驱动组件以及修剪组件对园林绿植进行自动修剪,通过设置控制系统,在对大叶黄杨、小叶黄杨等常见绿化带植物进行美化修剪过程中,通过录入多个三维样式模型,比如球形、方形或者伞形,且通过数字光栅投射器以及两个所述采集摄像头拍摄园林绿植的数字图像,根据录入的模型指导驱动组件以原有的园林绿植为基础进行3d打印和3d雕塑修剪,实现不仅能够自动修剪园林绿植,还能够修剪出设定的三维样式,通过还能够根据需求修剪出不同形状的园林绿植。
技术特征:
1.一种园林植被美化用修剪装置,其特征在于:包括修剪装置以及用于控制修剪装置的控制系统,所述修剪装置包括移动底座(1),所述移动底座(1)上设有智能组件(2)以及驱动组件(3),所述驱动组件(3)上设有修剪组件(4);
2.根据权利要求1所述的一种园林植被美化用修剪装置,其特征在于:所述修剪装置还包括收集组件(5),所述收集组件(5)包括设置在所述移动底座(1)上的收集网箱(501),所述收集网箱(501)位于所述滑轨(301)一侧。
3.根据权利要求2所述的一种园林植被美化用修剪装置,其特征在于:所述移动底座(1)包括两个驱动后轮以及两个转向前轮,所述控制器(201)控制所述移动底座(1)向前移动以及转向。
4.根据权利要求3所述的一种园林植被美化用修剪装置,其特征在于:所述伸缩端(3032)在所述固定端(3031)内部上下滑动,所述固定端(3031)侧壁设有第一电动伸缩杆(311),所述第一电动伸缩杆(311)上部输出端与所述支撑座(304)下表面连接。
5.根据权利要求4所述的一种园林植被美化用修剪装置,其特征在于:所述修剪组件(4)包括设置在最外侧的所述三轴转向臂(305)的端部的剪刀(401)以及第二电动伸缩杆(402),所述第二电动伸缩杆(402)输出端与所述剪刀(401)上其中一个刀把连接。
6.根据权利要求5所述的一种园林植被美化用修剪装置,其特征在于:所述三轴转向臂(305)包括第一杆(3051),所述第一杆(3051)端部活动设有第一转轴(3052),所述第一转轴(3052)上端设有第二杆(3053),所述第二杆(3053)下端设有第二转轴(3054),所述第二转轴(3054)端部设有第三杆(3055),所述第三杆(3055)端部设有第三转轴(3056),所述第三转轴(3056)端部设有长杆(3057)。
7.根据权利要求6所述的一种园林植被美化用修剪装置,其特征在于:所述第一杆(3051)、所述第二杆(3053)以及所述第三杆(3055)上均设有驱动伺服电机(3058),三个所述驱动伺服电机(3058)输出端分别与对应的第一转轴(3052)、第二转轴(3054)以及第三转轴(3056)端部连接,且所述第一转轴(3052)、所述第二转轴(3054)以及所述第三转轴(3056)相互垂直。
8.根据权利要求6所述的一种园林植被美化用修剪装置,其特征在于:最内侧所述三轴转向臂(305)中的第一杆(3051)端部与所述驱动转轴(306)上端连接,最外侧所述三轴转向臂(305)中长杆(3057)端部与所述修剪组件(4)连接。
9.根据权利要求6所述的一种园林植被美化用修剪装置,其特征在于:所述成像单元合成绿植的三维图像的过程如下,首先数字光栅投射器向园林绿植投射多幅等距的正弦光栅图像,由于园林绿植的复杂表面,光栅图像产生相应变形,获得的图像光强与相位函数,对采集到的变形光栅图像进行解相获取每个空间点的相位值,对获取的周期性相位值选择三频外差法进行相位的展开,最后以相位值作为特征值,从左侧采集摄像头(203)机图像上坐标为p的点出发,通过极线和级次混合约束寻找右侧采集摄像头(203)的对应的匹配点r根据立体视觉原理,借助相机标定获得投影矩阵在左侧采集摄像头(203)以及右侧采集摄像头(203)相机坐标系下方向的坐标矩阵,最终求解得到世界坐标系下的p坐标,最终完成三维图像拟合,并输出绿植的三维图像。
技术总结
本发明公开了一种园林植被美化用修剪装置,涉及园林植被美化用修剪装置技术领域,本发明包括修剪装置以及用于控制修剪装置的控制系统,修剪装置包括移动底座,移动底座上设有智能组件以及驱动组件,驱动组件上设有修剪组件,控制系统包括录入单元、成像单元、处理单元以及驱动单元,录入单元录入多个三维样式模型,并通过控制器选择需要修剪的三维样式模型,成像单元通过数字图像合成得到绿植的三维图像,处理单元通过对比三维样式模型与三维图像,驱动单元控制驱动组件以及修剪组件对园林绿植进行自动修剪。本发明为一种园林植被美化用修剪装置,能够进行自动修剪,且修剪样式多样化,修剪样式人工自行订制。
技术研发人员:张爱娣,战国强,曾巧如
受保护的技术使用者:广东生态工程职业学院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!