一种采茶机器人
本发明涉及机器人,具体涉及一种采茶机器人。
背景技术:
1、最新一代采茶机器人已发展至利用视觉相机对叶芽进行识别,并能够区分老嫩芽,实现针对嫩芽(较小)的采摘。然而,仍存在如下的问题:(1)采集机构多为剪切(剪刀)式结构,在剪切嫩芽时容易误伤其他茶叶,影响茶树后续产量和品质;(2)在采集一片嫩芽后即需要收集一次(放置到收集箱),再进行复位,采摘效率低下。
技术实现思路
1、发明目的:本发明的目的是提供一种采摘效率高,同时可避免误伤的采茶机器人。
2、技术方案:本发明所述的采茶机器人,包括机架,机架上搭载有视觉相机、采摘机构和收集箱,机架上还搭载有气泵,所述采摘机构包括前部开口的采集盒,开口下端设置有静刀片,开口上端铰接有动刀片,动刀片弧形内弯;采集盒顶部设置有带复位弹簧的往复式电磁铁,用于驱动动刀片开合;当动刀片打开时,嫩芽能够进入开口;当动刀片闭合时,配合静刀片掐断嫩芽;采集盒、气泵和收集箱依次通过气管相连,使得采集盒内腔中暂存的嫩芽能够被输送至收集箱。
3、进一步地,采集盒内腔于开口处下沉,且底部为斜面,该内腔结构形式可有效防止采摘的嫩芽从开口处掉出,以及防止嫩芽在入口处堆积。
4、进一步地,采集盒后部靠近斜面下部的位置开孔,并通过气管与气泵相连。
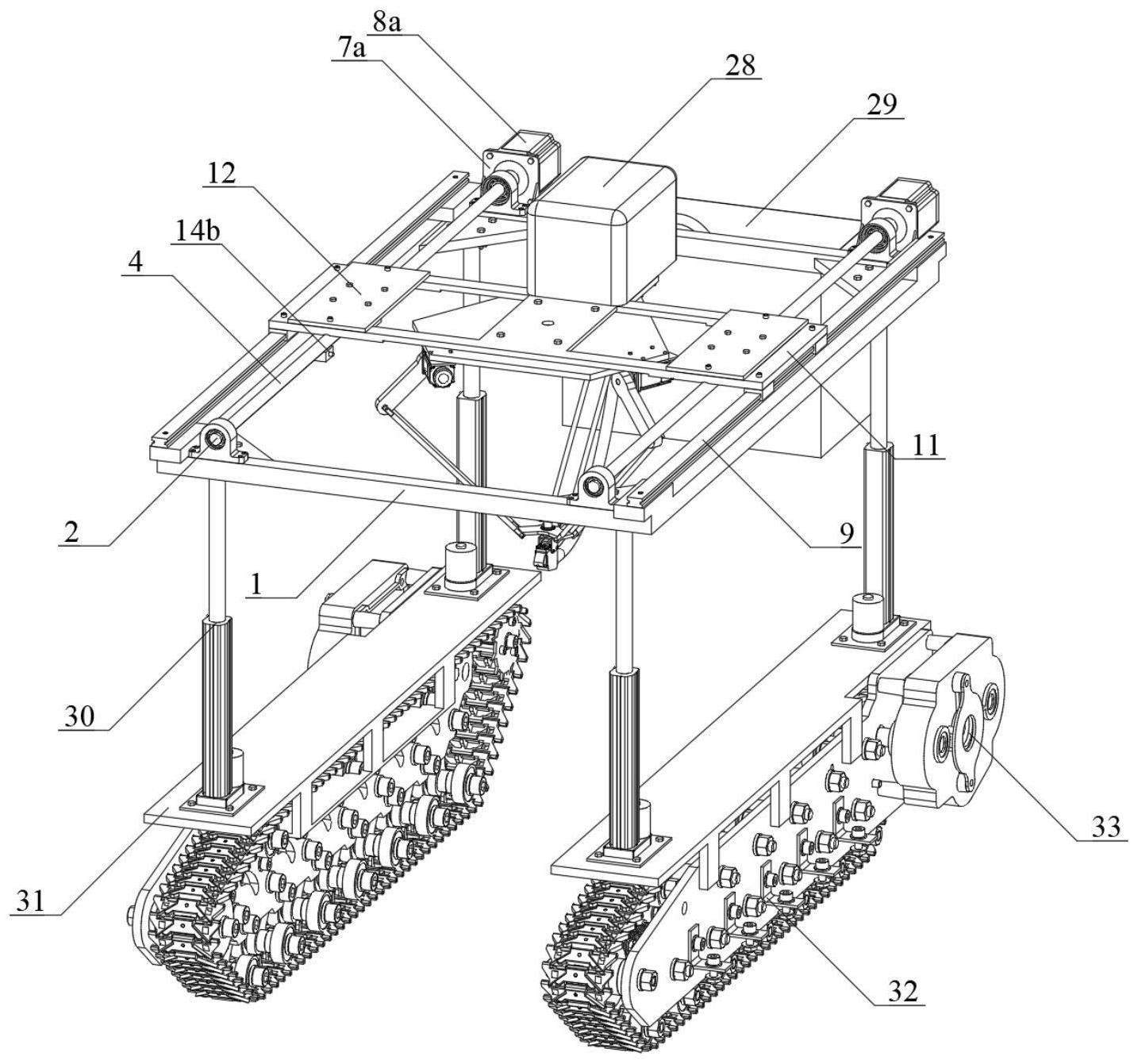
5、进一步地,机架上设置有一对导轨,导轨上设置有导轨滑块,两个导轨滑块顶部设置有导轨滑块顶板;机架上还设置有横向丝杠驱动机构,用于驱动导轨滑块顶板沿导轨移动;导轨滑块顶板底部安装有并联机构,采集盒安装于并联机构末端,所述并联机构用于带动采集盒准确到达目标嫩芽位置。
6、进一步地,所述并联机构包括上下相对设置的静平台和动平台,静平台底部沿延边环向均匀设置三个步进电机,步进电机的转轴上连接有大臂,大臂另一端铰接有小臂,小臂另一端与动平台铰接相连;采集盒设置在动平台下方。
7、进一步地,采集盒固定在采摘机构连接件上,动平台上端面固定有用于驱动采摘机构连接件转动的步进电机。
8、进一步地,所述视觉相机的数量为两个,分别安装于静平台底部和机架一侧底部。
9、进一步地,所述横向丝杠驱动机构包括通过轴承座转动设置在机架上的丝杠,丝杠螺母顶部固定有丝杠螺母顶板,丝杠螺母顶板与导轨滑块顶板相固定;机架上固定有用于驱动丝杠转动的步进电机。
10、进一步地,所述横向丝杠驱动机构的数量为两套。
11、进一步地,机架底部四角均设置有推杆电机,同侧的推杆电机固定在底座上,底座下方设有履带轮,履带轮带有驱动件。
12、有益效果:本发明与现有技术相比,具有如下显著优点:
13、(1)采集盒前部的动、静刀片为仿鸟嘴结构,其中弧形内弯的动刀片在打开时,能够拨开叠积的茶叶,在闭合时,能够有效包裹嫩芽,在保证嫩芽完整性的同时,避免了对其他茶叶的误伤;
14、(2)采集盒具有内腔,当动、静刀片将嫩芽掐断后,嫩芽被收集于内腔中短暂收集,随后被吸出并输送至收集箱,实现了嫩芽采摘与收集的同步进行,大大提高了采摘效率;
15、(3)动刀片采用带弹簧复位的往复式电磁铁驱动,具有更高的动作频率,有利于保证采摘效率;刀面与芽茎接触时间短(0.02s左右),施加力小(5n左右),可有效减轻采摘对于茶树的损伤。
技术特征:
1.一种采茶机器人,包括机架(1),机架(1)上搭载有视觉相机、采摘机构和收集箱(29),其特征在于,机架(1)上还搭载有气泵(28),所述采摘机构包括前部开口的采集盒(19),开口下端设置有静刀片(20),开口上端铰接有动刀片(21),动刀片(21)弧形内弯;采集盒(19)顶部设置有带复位弹簧(24)的往复式电磁铁(26),用于驱动动刀片(21)开合;当动刀片(21)打开时,嫩芽能够进入开口;当动刀片(21)闭合时,配合静刀片(20)掐断嫩芽;采集盒(19)、气泵(28)和收集箱(29)依次通过气管相连,使得采集盒(19)内腔中暂存的嫩芽能够被输送至收集箱(29)。
2.根据权利要求1所述的采茶机器人,其特征在于,采集盒(19)内腔于开口处下沉,且底部为斜面。
3.根据权利要求2所述的采茶机器人,其特征在于,采集盒(19)后部靠近斜面下部的位置开孔,并通过气管与气泵(28)相连。
4.根据权利要求1至3中任一项所述的采茶机器人,其特征在于,机架(1)上设置有一对导轨(9),导轨(9)上设置有导轨滑块(10),两个导轨滑块(10)顶部设置有导轨滑块顶板(11);机架(1)上还设置有横向丝杠驱动机构,用于驱动导轨滑块顶板(11)沿导轨(9)移动;导轨滑块顶板(11)底部安装有并联机构,采集盒(19)安装于并联机构末端,所述并联机构用于带动采集盒(19)准确到达目标嫩芽位置。
5.根据权利要求4所述的采茶机器人,其特征在于,所述并联机构包括上下相对设置的静平台(13)和动平台(17),静平台(13)底部沿延边环向均匀设置三个步进电机(8b),步进电机(8b)的转轴上连接有大臂(15),大臂(15)另一端铰接有小臂(16),小臂(16)另一端与动平台(17)铰接相连;采集盒(19)设置在动平台(17)下方。
6.根据权利要求5所述的采茶机器人,其特征在于,采集盒(19)固定在采摘机构连接件(18)上,动平台(17)上端面固定有用于驱动采摘机构连接件(18)转动的步进电机(8c)。
7.根据权利要求5所述的采茶机器人,其特征在于,所述视觉相机的数量为两个,分别安装于静平台底部和机架一侧底部。
8.根据权利要求4所述的采茶机器人,其特征在于,所述横向丝杠驱动机构包括通过轴承座(2)转动设置在机架(1)上的丝杠(4),丝杠螺母(5)顶部固定有丝杠螺母顶板(12),丝杠螺母顶板(12)与导轨滑块顶板(11)相固定;机架(1)上固定有用于驱动丝杠(4)转动的步进电机(8a)。
9.根据权利要求8所述的采茶机器人,其特征在于,所述横向丝杠驱动机构的数量为两套。
10.根据权利要求1所述的采茶机器人,其特征在于,机架(1)底部四角均设置有推杆电机(30),同侧的推杆电机(30)固定在底座(31)上,底座(31)下方设有履带轮(32),履带轮(32)带有驱动件(33)。
技术总结
本发明公开了一种采茶机器人,其机架上搭载有视觉相机、采摘机构、气泵和收集箱,采摘机构包括前部开口的采集盒,开口下端设置有静刀片,开口上端铰接有动刀片,动刀片弧形内弯;采集盒顶部设置有带复位弹簧的往复式电磁铁,用于驱动动刀片开合;当动刀片打开时,嫩芽能够进入开口;当动刀片闭合时,配合静刀片掐断嫩芽;采集盒、气泵和收集箱依次通过气管相连,使得采集盒内腔中暂存的嫩芽能够被输送至收集箱。本发明能够提升采摘效率,在保证嫩芽完整性的同时,避免对其他茶叶的误伤。
技术研发人员:胡朝斌,孔祥国,陈晓淼
受保护的技术使用者:江苏科技大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!