一种基于图像识别的园林树木智能修剪系统及方法与流程
本发明属于计算机、智能控制及数据处理,具体涉及一种基于图像识别的园林树木智能修剪系统及方法。
背景技术:
1、在现有的园林管理和树木修剪技术中,通常采用人工修剪方法,其中工人需要爬上梯子,使用手动工具如电锯、剪刀等,对树冠、枝干和叶片进行修剪。
2、然而,这种传统方法存在许多挑战和限制,包括以下方面的问题:
3、安全风险:工人需要爬上梯子或高架设备,这会导致操作员受伤或摔倒的风险。此外,使用电锯等锐利工具也可能引发伤害。
4、有限的经验:修剪树木需要工人具备丰富的园艺经验,包括了解不同树种的生长特性、适当的修剪方法和定期维护的需求。然而,许多工人的经验有限,难以根据树木的类型、年龄和形状进行个性化修剪。
5、不统一的修剪质量:人工修剪受到操作员技能和经验的限制,因此难以实现高度一致的修剪质量。不同工人的操作可能会导致树木的形状和健康出现不一致的结果。
6、需要大量人力:在大规模的园林和树木管理项目中,需要雇佣大量的工人进行修剪,这增加了劳动力成本和时间消耗。
7、无法精确控制:传统修剪方法难以精确控制修剪的深度和位置,这可能导致过度修剪或不足修剪,对树木的健康产生负面影响。
8、鉴于上述问题,研究和开发自动化树木修剪技术成为一个重要的课题。这些技术结合了计算机视觉、机器学习、机器人技术和智能控制,旨在提高修剪的精确性、安全性和效率。自动化修剪系统可以根据树木的特征和需求进行个性化修剪,减少人为错误,提高树木的健康和园林的美观性。这种技术不仅可以提高园林管理的效率,还可以降低维护成本,并减少操作员的风险。因此,它代表了园林和树木管理领域的未来发展方向。
9、以上背景技术部分中公开的以上信息只是用来加强对本文所描述技术的背景技术的理解,因此,背景技术中可能包含某些信息,这些信息对于本领域技术人员来说并未形成在本国已知的现有技术。
技术实现思路
1、为了解决上述现有技术存在的缺陷,本发明提出一种基于图像识别的园林树木智能修剪系统及方法。
2、本发明采用的技术方案如下:
3、一种基于图像识别的园林树木智能修剪方法,包括:
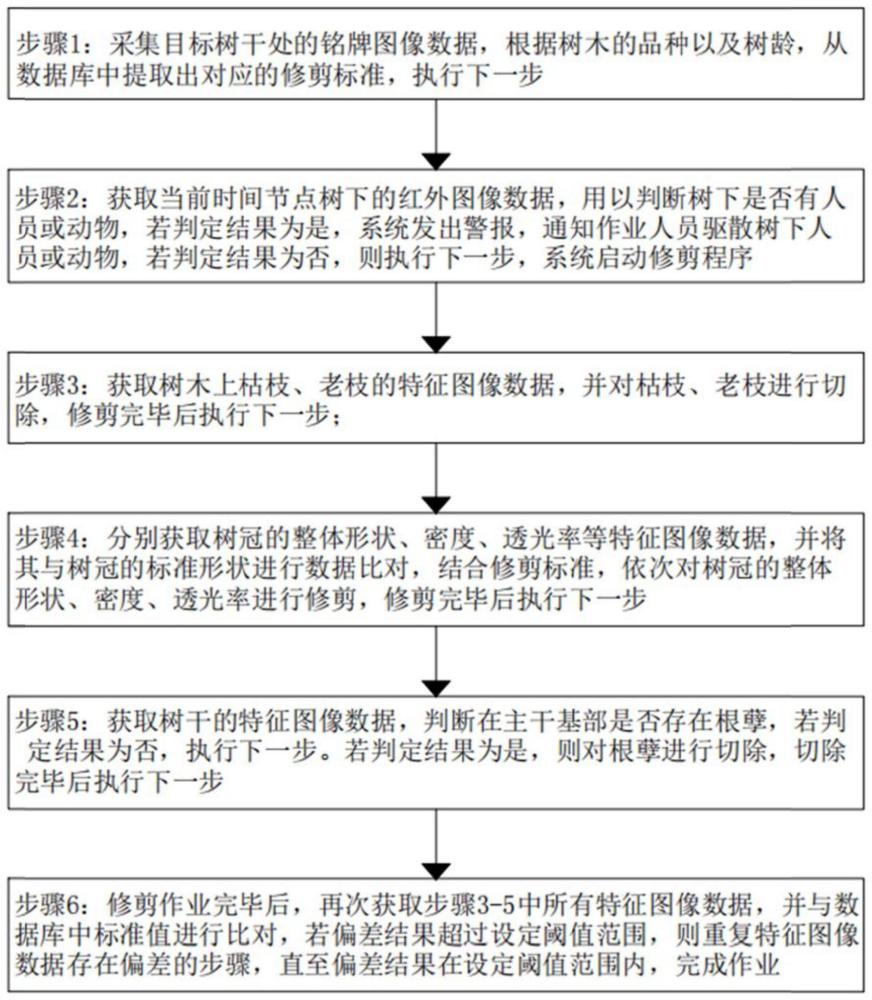
4、步骤1:采集目标树干处的铭牌图像数据,根据树木的品种以及树龄,从数据库中提取出对应的修剪标准,执行下一步;
5、步骤2:获取当前时间节点树下的红外图像数据,用以判断树下是否有人员或动物,若判定结果为是,系统发出警报,通知作业人员驱散树下人员或动物,若判定结果为否,则执行下一步,系统启动修剪程序;
6、步骤3:获取树木上枯枝和/或老枝的特征图像数据,并对枯枝和/或老枝进行切除,修剪完毕后执行下一步;
7、步骤4:分别获取树冠的整体形状、密度、透光率等特征图像数据,并将其与树冠的标准形状进行数据比对,结合修剪标准,依次对树冠进行符合该修剪标准中的整体形状、密度和/或透光率的修剪动作,修剪完毕后执行下一步;
8、步骤5:获取树干的特征图像数据,判断在主干基部是否存在根孽,若判定结果为否,执行下一步。若判定结果为是,则对根孽进行切除,切除完毕后执行下一步;
9、步骤6:修剪作业完毕后,再次获取步骤3-5中所有特征图像数据,并与数据库中标准值进行比对,若偏差结果超过设定阈值范围,则重复执行特征图像数据存在偏差的步骤,直至偏差结果在设定阈值范围内,完成作业。
10、在某些实施方式中,所述系统包括:主控装置以及与主控装置连接的行走机构、机械臂、树枝修剪组件以及图像采集装置,所述机械臂安装在行走机构上,所述树枝修剪组件安装在机械臂端部,图像采集装置安装在机械臂的端部;行走机构用于控制修剪系统移动,机械臂用于控制树枝修剪工具转动,树枝修剪组件用于对待修剪区域作业,图像采集装置用于获取待修剪树木的实时图像数据,主控装置用于对实时图像数据进行处理,并将实时图像数据与主控装置内部存储的标准图像数据进行对比,并从数据库中提取出符合当前目标的修剪标准。
11、在某些实施方式中,所述树枝修剪组件包括:对接组件和作业组件,作业组件通过对接组件与机械臂端部连接,所述作业组件包括分别用于修剪小枝、枝干以及涂抹愈合剂的三个工作头,还包括用于控制工作模式切换的工作头切换装置。
12、所述图像采集装置包括若干个图像识别单元,其分别为:
13、第一图像识别单元,用于获取树干处的铭牌图像数据;
14、第二图像识别单元,用于获取树下人员的红外图像数据;
15、第三图像识别单元,用于获取树木上枯老枝的特征图像数据;
16、第四图像识别单元,用于获取树冠的整体形状的特征图像数据;
17、第五图像识别单元,用于获取树冠密度的特征图像数据;
18、第六图像识别单元,用于获取树冠透光率的特征图像数据;
19、在某些实施方式中,还包括报警装置,所述主控装置控制第一图像识别单元常开,控制第二图像识别单元、第三图像识别单元、第四图像识别单元、第五图像识别单元、第六图像识别单元、工作头切换装置以及报警装置常闭;
20、当行走机构位于修剪区域后,主控装置控制第一图像识别单元获取树干处铭牌图像数据,根据树木的品种以及树龄,并与主控装置内部数据库作数据比对,确定符合当前目标的修剪程序,并进行修剪准备;
21、主控装置控制第二图像识别单元开启,第二图像识别单元获取当前时间节点树下的红外图像数据,基于热成像原理,判断树下是否有人员或动物,若判定结果为是,主控装置控制控制报警装置发出警报,驱散树下人员或动物,若判定结果为否,则主控装置控制第三图像识别单元开启;
22、第三图像识别单元获取树木上枯老枝的特征图像数据,并对枯老枝进行定位,主控装置控制工作头切换装置开启,根据枯老枝的尺寸将匹配工作头,控制工作头对枯老枝进行切除,切除完毕,第三图像识别单元再次获取树木上枯老枝的特征图像数据,用于检测枝干上的枯老枝是否切除完毕,并与主控装置内部数据库的数据比对,若偏差结果超过设定阈值范围,则重复该步骤,直至偏差结果在设定阈值范围内,则主控装置控制第四图像识别单元开启;
23、第四图像识别单元获取树冠的整体形状的特征图像数据,结合修剪标准对树冠的整体形状进行修剪,修剪完毕,第四图像识别单元再次获取树冠的整体形状的特征图像数据,用于判定树冠形状是否符合标准,并与主控装置内部数据库的数据比对,若偏差结果超过设定阈值范围,则重复该步骤,直至偏差结果在设定阈值范围内,则主控装置控制第五图像识别单元开启;
24、第五图像识别单元获取树冠密度的特征图像数据,结合修剪标准对树冠中密度高的区域进行枝叶修剪,修剪完毕,第五图像识别单元再次获取树冠密度的特征图像数据,用于判定树冠密度是否符合标准,并与主控装置内部数据库的数据比对,若偏差结果超过设定阈值范围,则重复该步骤,直至偏差结果在设定阈值范围内,则主控装置控制第六图像识别单元开启;
25、第六图像识别单元获取树冠透光率的特征图像数据,结合修剪标准对树冠中透光率低的区域进行枝叶修剪,修剪完毕,第六图像识别单元再次获取树冠透光率的特征图像数据,用于判定树冠透光率是否符合标准,并与主控装置内部数据库的数据比对,若偏差结果超过设定阈值范围,则重复该步骤,直至偏差结果在设定阈值范围内;
26、所述图像采集装置还包括:
27、第七图像识别单元,用于获取主干基部处根孽的特征图像数据;
28、主控装置控制第七图像识别单元常闭;当对树冠进行形状、密度以及透光率进行修剪作业完毕后,主控装置控制第七图像识别单元开启,第七图像识别单元获取主干基部处根孽的特征图像数据,结合修剪标准将根孽进行枝叶切除,切除完毕,第七图像识别单元再次获取主干基部处根孽的特征图像数据,用于检测主干基部处根孽是否切除完毕,并与主控装置内部数据库的数据比对,若偏差结果超过设定阈值范围,则重复该步骤,直至偏差结果在设定阈值范围内。
29、在某些实施方式中,在树冠以及树干修剪作业完毕后,还包括对切口创面进行处理,所述系统还包括切口创面检测装置,用于检测切口创面的倾斜角度、尺寸以及愈合剂涂抹情况。
30、所述切口创面检测装置包括角度检测装置、尺寸检测装置以及愈合剂检测装置,主控装置控制角度检测装置、尺寸检测装置以及愈合剂检测装置常闭;
31、在树冠以及树干修剪作业完毕后,主控装置控制角度检测装置开启,角度检测装置基于图像识别,获取切口创面的倾斜角度,并与主控装置内部数据库的数据比对,若偏差结果超过设定阈值范围,主控装置控制工作头切换装置开启,匹配对应的工作头,控制工作头对切口创面进行修剪,使其符合标准阈值范围,则主控装置控制尺寸检测装置开启;
32、尺寸检测装置获取切口创面的尺寸,并与主控装置内部数据库的数据比对,若超过标准值,主控装置控制工作头切换装置开启,匹配对应的工作头,控制工作头对切口创面涂抹愈合剂,涂抹完毕后,主控装置控制愈合剂检测装置开启;
33、愈合剂检测装置基于图像识别,获取切口创面的上愈合剂的涂抹均匀度,若检测到切口创面部分区域或整体区域未涂抹,主控装置再次控制工作头对切口创面进行愈合剂涂抹作业,直至检测结果符合标准。
34、一种基于图像识别的园林树木智能修剪系统,用于实现所述的园林树木智能修剪方法。
35、一种存储介质,所述存储介质上存储有计算机程序,所述计算机程序被运行时执行所述的园林树木智能修剪方法。
36、综上所述,由于采用了上述技术方案,本发明的有益效果是:
37、总体而言,相比于现有技术,本发明所提供的一种基于图像识别的园林树木智能修剪系统及方法,遵从树木修剪的“先上后下、先内后外、去弱留强、去老刘新”的原则,通过主控装置、行走机构、机械臂、树枝修剪组件、警报装置以及图像采集装置的结合,基于计算机视觉、机器学习、机器人技术和智能控制,按序对枯老枝进行重短截的切除方式,切除完毕后先对树冠的整体外形进行轻短截的修剪方式,修剪完毕后使用疏剪的方式对树冠的密度以及透光率进行调整,使其树冠满足园林的美观设计的前提下,增加树木的实用性,使枝条分布更加均匀,加大树下空间,改善通风透光环境,有利于树冠内部枝条生长发育,促使树下花芽分化,树冠修剪完毕后,按序在对树干进行修剪,对树干基部、伤口处当年长出的嫩枝、根部长出的根孽进行切除,避免该类枝条和根孽争夺养分,导致树木出现生长不良的现象;在整个切除修剪过程中,全程对树下红外线图像检测,防止出现安全事故。通过上述,旨在提高修剪的精确性、安全性和效率。自动化修剪系统可以根据树木的特征和需求进行个性化修剪,减少人为错误,提高树木的健康和园林的美观性,不仅可以提高园林管理的效率,还可以降低维护成本,并减少操作员的风险。
- 还没有人留言评论。精彩留言会获得点赞!