一种智能驱鸟机器人的制作方法
本技术涉及驱鸟机器人,尤其是涉及一种智能驱鸟机器人。
背景技术:
1、驱鸟从广义上讲主要是针对一些特殊场所,如农场,果园,风力发电厂和军用机场等地,采取一些技术手段,防止鸟类进入该领地,造成领地经济损失或设备安全,特别是机场等地,鸟类在领空会造成飞机起降安全,驱鸟器的作用就是找到并识别鸟类,并通过一定的技术手段,让鸟类远离此区域,避免发生危险;
2、现有的语音驱鸟器虽然通过各种手段,如噪声,鸟类天敌的声音达到驱散鸟群的效果,但大多都是固定不动,或者人开车载着设备到处寻找鸟群;固定不动的方式驱鸟范围小,且无法识别鸟类,造成遗漏;人开车载着设备方案,不够智能话,人力成本高。
技术实现思路
1、为了实现驱鸟器可以自主定位鸟群并自主巡航驱赶鸟群,本技术提供一种智能驱鸟机器人。
2、本技术提供的一种智能驱鸟机器人采用如下的技术方案:
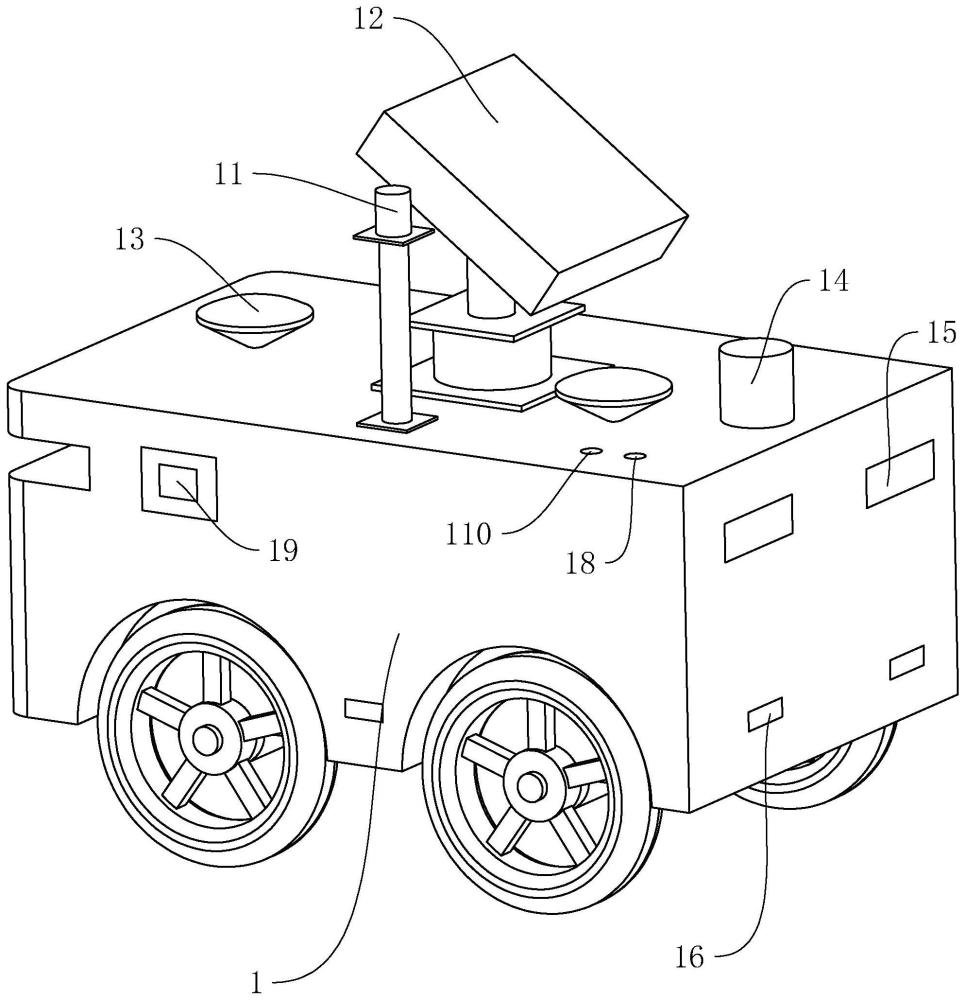
3、一种智能驱鸟机器人,包括小车本体,所述小车本体上设置有多角度自动旋转摄像头、多角度旋转远程定向声波发生器、多线雷达、摄像头、单线雷达、信号接收器和红外线测距仪;
4、所述多角度自动旋转摄像头用于识别飞鸟等物体;
5、所述多角度旋转远程定向声波发生器用于对识别到的飞鸟发出强声驱散鸟群;
6、所述多线雷达设置在所述小车本体前端,用于建图、导航和识别障碍物;
7、所述摄像头设置在所述小车本体前端,用于识别物体,方便所述小车本体内部系统对前方物体的判断;
8、所述单线雷达设置在所述小车本体后端,用于所述小车本体在后退和转弯时,识别后方是否有障碍物;
9、所述信号接收器分别设置在所述小车本体前后两侧,用于接收信号和定位所述小车本体;
10、所述红外线测距仪设置在所述小车本体四周,用于测量所述小车本体与近距离物体的距离,以用于所述小车本体内部逻辑系统判断。
11、通过采用上述技术方案,启动小车本体,其后多线雷达、摄像头、单线雷达、信号接收器、红外线测距仪、多角度自动旋转摄像头开始工作;多线雷达通过激光点云实时扫描建立周边地图,影像头作为多线雷达的补充通过图像识别,识别前方是否有障碍物,是什么障碍物;单线雷达通过激光点判断小车后方是否有障碍物,以及障碍物距离智能驱鸟机器人距离;通过信号接收器接收信号判定自身位置,弥补多线雷达在大场景下接受范围受限的风险;在距离障碍物较近时,红外线测距仪可近距离识别小车本体距离障碍物的精确距离,弥补单线雷达在近距离时距离测距不够精准的问题;多角度自动旋转摄像头在自主旋转,识别周边是否有鸟类,当多角度自动旋转摄像头识别到小鸟后,多角度旋转远程定向声波发生器转到相应的位置,对准小鸟发出强声驱赶。从而可实现自主巡逻,解放人力,实现智能化;多角度摄像头可实现多角度全天候实时观察地面和空中情况,能更有效的发现目标;多角度旋转远程定向声波发生器配合多角度摄像头和小车本体,可实现精准定点发生驱赶,避免在没有发现目标鸟类时工作产生噪声;智能驱鸟机器人不仅可自主巡逻,也可规划路线巡逻,可实施定位自身位置,保证使用者实施了解小车工作区域和状态;多线雷达、摄像头、单线雷达、信号接收器、红外线测距仪的多重识别让智能驱鸟机器人更加安全可靠。
12、可选的,所述小车本体设置有外置充电口,用于小车本体自动外接电源自动充电;
13、所述小车本体上设置有用于在紧急状态下停止其工作的急停按钮。
14、通过采用上述技术方案, 当智能驱鸟机器人电量较低时,自主回到充电点,通过外置充电口充电自动充电;
15、当遇到紧急情况,需要智能驱鸟机器人急停时,按下急停按钮使其停止工作。
16、可选的,所述小车本体上设置有用于在其停止作业时保护所述小车本体上设备的防护盖,所述小车本体上设置有用于自动将所述防护盖盖在所述小车本体上的关闭组件。
17、通过采用上述技术方案,当驱鸟机器人停止运作时,关闭组件带动防护盖翻转盖在小车本体的顶部,罩住多角度自动旋转摄像头、多角度旋转远程定向声波发生器信号接收器等位于小车本体顶部的设备,对小车本体上的设备起到防护作用,避免长期外置淋雨影响设备的实用寿命。
18、可选的,所述关闭组件包括第一电机,所述第一电机设置在所述小车本体内,所述第一电机连接有第一转杆,所述第一转杆铰接有第二转杆,所述第二转杆转动连接有横杆,所述小车本体内设置有两个导向块,所述导向块上开设有导向槽,所述横杆的两端分别滑移设置在同侧的所述导向块的所述导向槽内,所述横杆连接有连接块,所述连接块与所述防护盖连接,所述连接盖滑移设置在所述导向槽内,所述第一电机转动时,所述连接块配合所述横杆带动所述防护盖先向上移动再翻转。
19、通过采用上述技术方案,在开启防护盖时,第一电机带动第一转杆转动,第一转杆使横杆沿着导向槽移动,横杆移动带动连接块先向上移动在进行90度的转动,使防护盖先向上移动与小车本体分离,防护盖再进行90度翻转打开;
20、在关闭防护盖时,第一电机反转使防护盖先翻转至小车本体上方再下降盖在小车本体顶部。
21、可选的,所述导向槽包括竖槽和弧形槽,所述竖槽与所述弧形槽连通,所述竖槽顶点至所述弧形槽内侧壁的距离相同。
22、通过采用上述技术方案,在打开防护盖时,第一电机带动第一转杆转动,第一转动杆带动第二转杆翻转,横杆先沿着竖槽向上移动,当横杆移动至竖槽与弧形槽的连通处时,连接块的转轴恰好向上移动至竖槽的顶部,然后第二连杆继续转动时,横杆进入弧形槽内移动使连接块转动,从而实现防护盖在竖槽和弧形槽配合导向下先进行提升再进行翻转。
23、可选的,两个所述导向块滑动连接在所述小车本体内,所述小车本体内滑动连接有安装板,所述第一电机安装在所述安装板上,所述安装板与所述第一电机同侧设置的所述导向块连接,所述小车本体内设置有气缸,所述气缸与另一个所述导向块连接,所述小车本体开设有供连接块向下滑动的移动槽。
24、通过采用上述技术方案,防护盖翻转90度后,气缸拉动导向块向下移动,使安装板、第一电机和防护盖整体向下移动,避免防护盖遮挡住多角度自动旋转摄像头和多角度旋转远程定向声波发生器影响智能驱鸟机器人进行驱鸟。
25、可选的,所述防护盖包括第一翻盖和第二翻盖,所述第一翻盖转动连接有铰接轴,所述铰接轴与所述第二翻盖固定,并且所述第一翻盖和所述第二翻盖在防护状态下相拼接,所述第一翻盖与所述连接块固定,所述铰接轴同轴设置有蜗轮,所述第一翻盖上安装有第二电机,所述第二电机连接有蜗杆,所述蜗杆与所述蜗轮啮合。
26、通过采用上述技术方案,防护盖翻转90度后,第二电机带动蜗杆转动,蜗杆带动蜗轮转动,蜗轮带动铰接轴转动,铰接轴带动第二翻盖翻转180度,使第一翻盖的罩面与第二翻盖的罩面贴合,进一步避免防护盖遮挡住多角度自动旋转摄像头和多角度旋转远程定向声波发生器影响智能驱鸟机器人进行驱鸟。
27、可选的,所述第二翻盖内远离所述第一翻盖的一端设置有用于将所述小车本体尾端顶起的顶撑件。
28、通过采用上述技术方案,当小车本体在行驶时被底部被障碍物卡住时,顶撑件从第一翻盖伸出,使小车本体尾端顶起使小车本体底部脱离障碍物,然后小车本体继续移动远离障碍物后,顶撑件复位使小车本体正常行驶。
29、可选的,所述顶撑件包括液压缸,所述液压缸位于所述第二翻盖内,所述液压缸连接有顶撑板,所述顶撑板位于所述第二翻盖内并可从所述第二翻盖远离第一翻盖的一端伸出,所述顶撑板上设置有滚轮。
30、通过采用上述技术方案,当小车本体在行驶时被底部被障碍物卡住时,液压缸推动顶撑板从第二翻盖伸出,顶撑板撑住地面抬高小车本体尾端使小车本体底部脱离障碍物,然后小车本体继续移动,顶撑板的滚轮配合小车本体移动远离障碍物后,液压缸带动顶撑板和滚轮伸入第二翻盖内使小车本体正常行驶。
31、综上所述,本技术包括以下至少一种有益技术效果:
32、1.可实现自主巡逻,解放人力,实现智能化;
33、2.多角度摄像头可实现多角度全天候实时观察地面和空中情况,能更有效的发现目标;
34、3. 多角度旋转远程定向声波发生器配合多角度摄像头和小车本体,可实现精准定点发生驱赶,避免在没有发现目标鸟类时工作产生噪声;
35、4.智能驱鸟机器人不仅可自主巡逻,也可规划路线巡逻,可实施定位自身位置,保证使用者实施了解小车本体工作区域和状态;
36、5. 多线雷达、摄像头、单线雷达、信号接收器、红外线测距仪和急停按钮的设计,多重识别让智能驱鸟机器人更加安全可靠。
- 还没有人留言评论。精彩留言会获得点赞!