一种基于花生触膜检测的智能化抠膜系统及方法
本发明涉及农业机械,尤其涉及一种基于花生触膜检测的智能化抠膜系统及方法。
背景技术:
1、覆膜花生种植不仅可以提高土壤温度、保持土壤湿度,还能有效抑制杂草生长,从而提高产量和品质。然而,在覆膜花生的田间管理过程中,需要在花生幼芽逐渐出土、生长初期进行抠膜处理,即将覆盖在芽上的薄膜材料剥离,使芽能够迅速生长并出土,确保花生植株能够充分吸收阳光和营养,避免出现高温炕芽现象。传统的抠膜操作通常依赖于人工,但人工抠膜操作不仅劳动密集,而且效率较低,难以满足大规模生产的需求,抠膜过程中还需要准确判断花生植株的生长状态和芽的位置,劳动强度大。为了解决上述问题,本发明提出了一种基于花生触膜检测的智能化抠膜系统及方法。
技术实现思路
1、为解决背景技术中存在的技术问题,本发明提出一种基于花生触膜检测的智能化抠膜系统及方法。
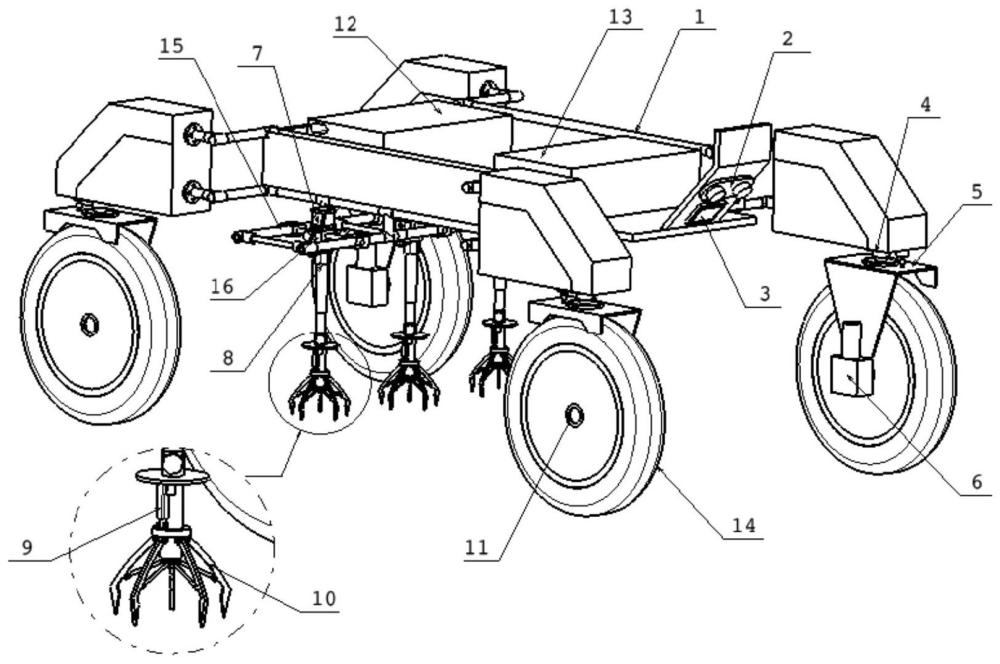
2、本发明提出的一种基于花生触膜检测的智能化抠膜系统,包括自走式抠膜机本体,所述自走式抠膜机本体包括有车架、四轮独立转向系统、花生触膜检测系统、抠膜执行装置;所述四轮独立转向系统固定安装于车架的四角处,所述四轮独立转向系统包括有转向舵机、底盘行走驱动电机,所述底盘行走驱动电机的动力输出轴固定连接有车轮;所述花生触膜检测系统包括有固态雷达、深度相机以及测速编码器,所述固态雷达和深度相机模块固定安装在车架最前端,所述测速编码器固定安装在车轮的输出轴上;所述抠膜执行装置固定安装在车架的中心位置上,所述抠膜执行装置包括有连杆框架、位置校正机构、旋转步进电机、电动推杆、机械爪开口调节推杆和执行部件——仿生机械爪,所述位置校正机构固定安装在连杆框架上,所述旋转步进电机固定安装在位置校正机构上端,所述电动推杆与旋转步进电机的输出轴固定连接,所述仿生机械爪固定连接在电动推杆尾端,所述机械爪开口调节推杆固定安装在仿生机械爪上。
3、提出一种基于花生触膜检测的智能化抠膜方法,包括如下步骤:
4、s1、通过测速编码器获取车辆的行驶速度v,进行速度反馈控制车速,通过磁敏式角度传感器测量各车轮转角,进行角度反馈,并利用四轮独立转向系统控制车辆转向;
5、s2、基于农艺情况获取行驶方向上的花生触膜情况信息,根据获取的行驶速度v计算机器行走路程l:
6、l=vt
7、其中,t为机器行走时间;
8、将l值与花生株距z比较,当l=z时,目标物中心点a的位置为(x0,y0+z,z0,其中,x0,y0,z0为初始抠膜点坐标;
9、s3、通过深度学习算法和图像处理技术获取花生触苗目标物中心点b的坐标,记为(x1,y1,z1),根据作物行间距h,模拟播种路线计算出车辆轨迹路线,控制转向舵机a1、a2、a3、a4转向,修正前进轨迹路线;
10、s4、通过固态雷达获取地表点云数据,对每个凸起区域的点云数据进行遍历,并依据z轴大小进行排序得到最高点和最低点坐标,计算每个凸起区域中点云间最大z轴间距,当点云间最大z轴距大于阈值时,定义点云间最大z轴距对应的凸起区域为目标区域,提取目标区域内目标物中心点c(x2,y2,z2);
11、s5、进行多传感器苗情信息融合,基于农艺需求、深度相机采集到的目标信息、固态雷达获取的目标信息进行数据匹配处理,将拟合度最高的数据点作为检测到最终目标点坐标(x3,y3,z3);
12、s6、根据目标点坐标(x3,y3,z3),结合机器行驶速度计算分别沿x、y方向移动机器手臂需要的补偿差值δx、δy;依据检测的目标物大小,控制机械爪开口调节推杆c1、c2、c3、c4改变机械爪开口大小,用于适应不同生长时期的苗情;
13、s7、控制电动推杆b1、b2、b3、b4推动抠膜机械爪伸缩,执行抠膜动作;机械爪将薄膜破开的同时,控制旋转步进电机d1、d2、d3、d4执行机械爪顺时针旋转,将薄膜卷起,机械爪再逆时针旋转,将薄膜松开完成抠膜动作。
14、优选的,s1中所述获取车辆的行驶速度v以及各轮转角,具体包括以下操作:
15、s1.1:将测速编码器固定安装在车轮旋转轴盘上,将磁敏式角度传感器旋转轴与车轮支架固定安装;
16、s1.2:在机器行走时,利用测速编码器实时获取车轮转速,转换成行进速度v,角度传感器检测各轮旋转角度进行反馈控制行进方向。
17、优选的,s3中所述获取目标位置中心点b的坐标为(x1,y1,z1)以及路径规划,具体包括以下操作:
18、s3.1:以深度相机为中心原点建立空间坐标系,车身横梁方向为x轴,车辆纵梁方向为y轴,竖直方向为z轴,轮胎所在位置在空间坐标系中坐标为(x5,y5,z5);
19、s3.2:通过深度相机获得前进方向上田间的图像信息并传送至训练好的yolo v7模型进行目标检测,识别出图像中的花生触膜区域,提取目标位置中心点b(x1,y1,z1);
20、s3.3:作业过程中,抠膜机跨2垄4路花生作业,与4行花生播种机作业模式匹配,基于花生行距h、抠膜机轮距w计算最佳行进路线,且此时轮胎距离作物距离为x;
21、s3.4:理论上距离其中,k为垄宽,j为垄距;实际过程中实际距离值x*=y5-y1,以实际距离值x*=x为目标保持路径跟踪。
22、优选的,s5中所述多传感器苗情信息融合,具体包括以下操作:
23、s5.1、依据覆膜花生种植农艺株距z、车速v以及单位时间t内车辆行进距离l,当l=z时,(x0,y0,z0)为初始抠膜点坐标,则初步判断下一个目标点a坐标为(x0,y0+z,z0);
24、s5.2、将s2中识别的目标框,提取花生苗中心点b坐标(x1,y1,z1)以及抠膜半径r;
25、s5.3、将s3中扫描的点云数据和垄面基本平面作差,差值高度在阈值范围内的即为目标点c(x2,y2,z2);
26、s5.4、通过优先级和加权平均法对a、b、c三点坐标进行拟合,优先权a>b>c,对应的权值分别是w1、w2、w2,且拟合时只考虑平面坐标,忽略z轴坐标值。
27、优选的,所述a、b、c三点坐标进行拟合具体如下:
28、s5.4.1:a、b、c三点完全重合:即x0=x1=x2=x3,y0+z=y1=y2=y3,此时目标中心点平面坐标为(x3,y3);
29、s5.4.2:a、b重合:即x0=x1,y0+z=y1,此时目标中心点平面坐标为(x1,y1);
30、s5.4.3:a、c重合:即x0=x2,y0+z=y2,此时目标中心点平面坐标为(x0,y0+z);
31、s5.4.4:b、c重合:即x1=x2,y1=y2,此时目标中心点平面坐标为(x1,y1);
32、s5.4.5:a、b、c三点均不重合:
33、
34、
35、此时目标中心点平面坐标为(x,y)。
36、优选的,s5中所述农艺需求包括播种株距、行距信息。
37、本发明所提出的一种基于花生触膜检测的智能化抠膜系统及方法,具有以下有益效果:
38、本发明提供了一种基于花生触膜检测的智能化抠膜系统及方法,通过获取车辆行驶速度和花生触膜情况信息进行反馈控制,根据花生种植模式和农艺情况结合机器前进距离初步预测目标位置中心点a,利用深度学习算法和图像处理技术确定目标位置中心点b,通过固态雷达获取地表点云数据并分析得到目标区域c,再基于多传感器信息融合技术对目标点坐标进行拟合,最终根据目标点d坐标和机器行驶速度计算补偿差值,并控制执行机械爪进行抠膜操作,从而实现对花生触膜的智能化检测和抠膜。具备实用和应用价值,可解决人工抠膜操作劳动密集、效率低的问题,相比现有技术,具有结构简单、易于实施且工作效率高等优点。
- 还没有人留言评论。精彩留言会获得点赞!