一种收获机自动控制方法、系统及收获机与流程
所属的技术人员知道,本发明可以实现为系统、方法或计算机程序产品,因此,本公开可以具体实现为以下形式,即:可以是完全的硬件、也可以是完全的软件(包括固件、驻留软件、微代码等),还可以是硬件和软件结合的形式,本文一般称为“电路”、“模块”或“系统”。此外,在一些实施例中,本发明还可以实现为在一个或多个计算机可读介质中的计算机程序产品的形式,该计算机可读介质中包含计算机可读的程序代码。可以采用一个或多个计算机可读的介质的任意组合。计算机可读介质可以是计算机可读信号介质或者计算机可读存储介质。计算机可读存储介质不限于——电、磁、光、电磁、红外线、或半导体的系统、装置或器件,或者任意以上的组合。计算机可读存储介质的更具体的例子(非穷举的列表)包括:具有一个或多个导线的电连接、便携式计算机磁盘、硬盘、随机存取存储器(ram),只读存储器(rom)、可擦式可编程只读存储器(eprom或闪存)、光纤、便携式紧凑磁盘只读存储器(cd-rom)、光存储器件、磁存储器件、或者上述的任意合适的组合。在本文件中,计算机可读存储介质可以是任何包含或存储程序的有形介质,该程序可以被指令执行系统、装置或者器件使用或者与其结合使用。尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
背景技术:
1、现代农业生产中,联合收获机在高速作业中需盯控近50多种参数并进行实时调整。在田间生产环境中,不同的地形、土壤和气候对作物的生产情况影响差异较大。即便在同一地块内,由于种植条件的不同,作物的植株高度和密度也不尽相同。这些因素直接影响联合收获机的工作状态。而在谷物收获作业中,造成机收作业过程中75%籽粒损失的是由收获机作业工况调整不当引起的。收获机喂入量过高时整车负载过大,此时会降低收获效率造成损失率突增。收获机喂入较小时,又会造成收获机无法发挥最佳性能造成能耗损失。随着谷物联合收获机收获作业速度的提升,传统基于驾驶员经验判断调整收获机各项参数实现最优收获工况的方式,已经无法满足当前收获机提高收获效率、减轻驾驶员作业强度、降低关键部件故障率的需求。
技术实现思路
1、本发明所要解决的技术问题是针对现有技术的不足,具体针对收获效率低的问题,具体提供了一种收获机自动控制方法、系统及收获机,具体如下:
2、1)第一方面,本发明提供一种收获机自动控制方法,具体技术方案如下:
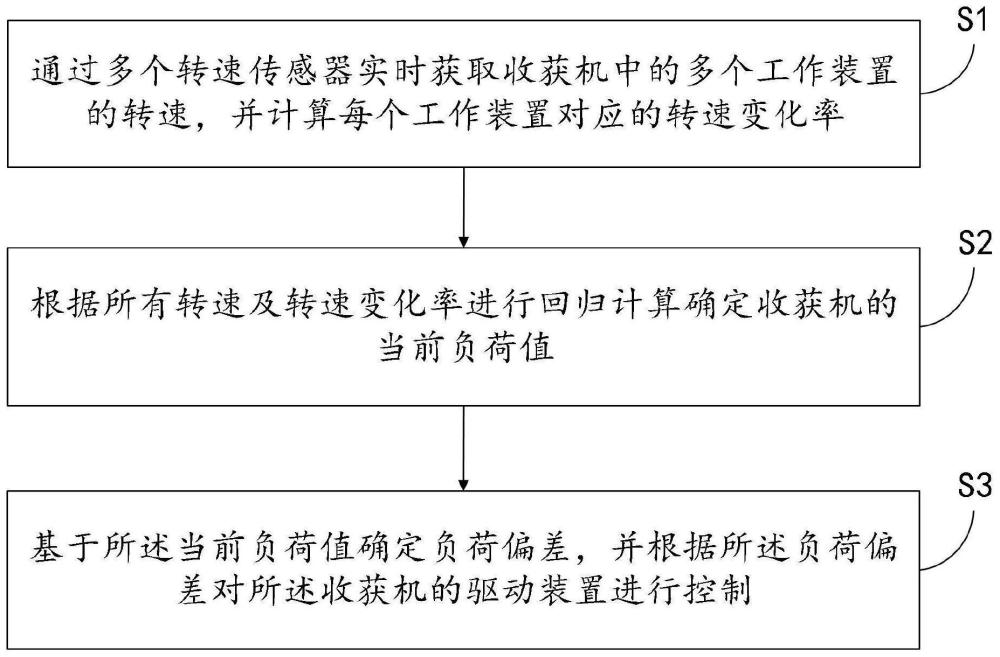
3、s1,通过多个转速传感器实时获取收获机中的多个工作装置的转速,并计算每个工作装置对应的转速变化率;
4、s2,根据所有转速及转速变化率确定所述收获机的当前负荷值;
5、s3,基于所述当前负荷值确定负荷偏差,并根据所述负荷偏差对所述收获机的驱动装置进行控制。
6、本发明提供的一种收获机自动控制方法的有益效果如下:
7、在基本不改变现有商品车型的硬件结构的前提下,采用实时监测各主要工作装置及工作装置的转速变化率、利用can通讯向发动机发送的目标转速信号与发动机实际转速信号的误差等利用多元回归分析的方法建立发动机负载的灰色关联预测关系,用于实时计算当前收获机的负荷情况。进而基于负荷情况完成对于收获机的控制,可以达到精准控制的目的。此外在监测当前转速的基础上继续引入转速变化率参与程序运算。同一数据采集周期内,相同转速下,不同的转速变化率将会导致两组信号变化出现明显差异。工作装置变化率的趋势一定程度上又可以代表当前工作装置的负载情况,因此某种意义上监测转速信号的变化率可以代替扭矩传感器的作用。
8、在上述方案的基础上,本发明还可以做如下改进。
9、进一步,多个工作装置包括收获机发动机转速、收获机作业速度、收获机的轴流滚筒、收获机的清洗风机、收获机的清选筛箱以及收获机的籽粒升运器中的至少两个。
10、进一步,确定所述收获机的当前负荷值的过程包括:
11、通过多部件回归预测灰色关联方法确定所述收获机的当前负荷值。
12、进一步,所述负荷偏差的确定过程包括:
13、根据所述当前负荷值以及预设负荷值确定所述负荷偏差。
14、2)第二方面,本发明还提供一种收获机自动控制系统,具体技术方案如下:
15、计算模块用于:通过多个转速传感器实时获取收获机中的多个工作装置的转速,并计算每个工作装置对应的转速变化率;
16、确定模块用于:根据所有转速变化率确定所述收获机的当前负荷值;
17、控制模块用于:基于所述当前负荷值确定负荷偏差,并根据所述负荷偏差对所述收获机的驱动装置进行控制。
18、在上述方案的基础上,本发明还可以做如下改进。
19、进一步,多个工作装置包括收获机的轴流滚筒、收获机的清洗风机、收获机的清选筛箱以及收获机的籽粒升运器中的至少两个。
20、进一步,确定所述收获机的当前负荷值的过程包括:
21、通过预设灰色关联方法确定所述收获机的当前负荷值。
22、进一步,所述负荷偏差的确定过程包括:
23、根据所述当前负荷值以及预设负荷值确定所述负荷偏差。
24、3)第三方面,本发明还提供一种收获机,包括如上任一项系统。
25、需要说明的是,本发明的第二方面及第三方面的技术方案及对应的可能的实现方式所取得的有益效果,可以参见上述对第一方面及其对应的可能的实现方式的技术效果,此处不再赘述。
技术特征:
1.一种收获机自动控制方法,其特征在于,包括:
2.根据权利要求1所述的一种收获机自动控制方法,其特征在于,多个工作装置包括:收获机的轴流滚筒、收获机的清洗风机、收获机的清选筛箱以及收获机的籽粒升运器中的至少两个。
3.根据权利要求1所述的一种收获机自动控制方法,其特征在于,确定收获机的当前负荷值的过程包括:
4.根据权利要求1所述的一种收获机自动控制方法,其特征在于,所述负荷偏差的确定过程包括:
5.一种收获机自动控制系统,其特征在于,包括:
6.根据权利要求5所述的一种收获机自动控制系统,其特征在于,多个工作装置包括:收获机的轴流滚筒、收获机的清选风机、收获机的清选筛箱以及收获机的籽粒升运器中的至少两个。
7.根据权利要求5所述的一种收获机自动控制系统,其特征在于,所述确定模块中确定所述收获机的当前负荷值具体包括:
8.根据权利要求5所述的一种收获机自动控制系统,其特征在于,所述负荷偏差的确定过程包括:
9.一种收获机,其特征在于,包括如权利要求5至8任意一项所述的一种收获机自动控制系统。
技术总结
本发明公开了一种收获机自动控制方法、系统及收获机,涉及农用机械技术领域,方法包括:通过多个转速传感器实时获取收获机中的多个工作装置的转速,并计算每个工作装置对应的转速变化率;根据监测的所有转速及转速变化率进行回归计算确定所述收获机的当前负荷值;基于所述当前负荷值确定负荷偏差,并根据所述负荷偏差对所述收获机的驱动装置进行控制。本发明采用实时监测各主要工作装置及工作装置的转速变化率、发动机CAN通讯目标转速信号与发动机实际转速信号的误差等利用多元回归分析的方法建立发动机负载的灰色关联预测关系,用于实时计算当前收获机的负荷情况。进而基于负荷情况完成对于收获机的控制,可以达到精准控制的目的。
技术研发人员:王志超,吴涛,付融冰,刘文明,张树岗,张鹏
受保护的技术使用者:潍柴雷沃智慧农业科技股份有限公司
技术研发日:
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!