一种管道灌溉恒压供水装置及其智能控制方法
本发明涉及一种管道灌溉恒压供水装置及其智能控制方法,属于农业自动化。
背景技术:
1、管道灌溉是一项以管道代替明渠进行输水的灌溉工程技术,已经成为现代农业灌溉领域最具发展潜力的新型灌溉方式之一。然而,管道中的水压稳定性会受到管道形变、堵塞、以及老化等因素的影响,从而导致管道灌溉区域内的灌溉水稳定性和利用率不高,常常出现局部区域的浇灌不均匀的现象。因此,保证管道中的水压稳定是实现灌溉用水稳定的基本前提。
2、现有的恒压灌溉装置通常通过传感器、控制器、水泵和pid控制算法的组合来维持水压的稳定。然而,这种传统的恒压控制方式存在一些弊端,如需耗费人工、容易出错、精度不高、响应速度慢以及抗干扰能力弱等。因此,急需开发一种新型的管道灌溉恒压供水装置及其智能控制方法,以实现对灌区水压的智能、实时调控,进一步提高管道灌溉的效率和稳定性。
技术实现思路
1、本发明的目的是克服现有技术的不足,提供一种管道灌溉恒压供水装置及其智能控制方法。
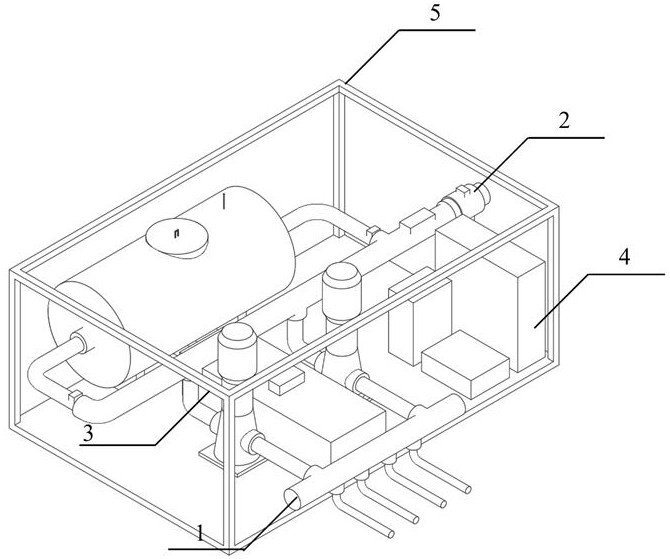
2、为了实现上述发明目的,本发明采用的技术方案如下:一种管道灌溉恒压供水装置,其特征在于,包括灌溉模块、过滤模块、光伏模块及控制模块,灌溉模块、过滤模块、光伏模块及控制模块均安装于安装架上;
3、所述灌溉模块包括进水口、供水主管、主水泵、备用泵、水泵底座、调节罐、调节罐进水管、调节罐进水电磁阀、调节罐出水管、调节罐出水电磁阀、灌溉送水管、运行特性传感器、环境传感器;
4、其中:调节罐固定于安装架上,调节罐进水管、调节罐出水管分别与调节罐的两端连接,且调节罐进水管、调节罐出水管均与调节罐内贯通;所述供水主管的一端连接进水口,另一端与调节罐出水管贯通连接,且调节罐出水管上安装有调节罐出水电磁阀;所述调节罐进水管一端与调节罐贯通连接,另一端连接于供水主管的侧壁上,且调节罐进水管与供水主管内贯通,调节罐进水管上安装有调节罐进水电磁阀;所述供水主管上装有用于监测供水主管内流量和压力数据的运行特性传感器,运行特性传感器位于过滤模块与调节罐进水管之间;所述主水泵、备用泵均固定于安装架上,主水泵分别贯通连接供水主管和灌溉送水管,备用泵分别贯通连接供水主管和灌溉送水管;
5、所述过滤模块位于进水口之后,进水口通过过滤模块与供水主管贯通连接;所述过滤模块包括砂石过滤器、叠片过滤器;进水口、砂石过滤器、叠片过滤器、供水主管依次贯通连接;所述砂石过滤器上设有排淤口、管道电磁阀,排淤口与砂石过滤器前端贯通,管道电磁阀与控制箱内的恒压调节控制器连接,控制供水主管的打开与关闭;所述排淤口上设有排淤口电磁阀,排淤口电磁阀与恒压调节控制器连接,控制排淤口打开与关闭;关闭排淤口电磁阀,打开管道电磁阀,水可经砂石过滤器过滤大颗粒,再经叠片过滤器细过滤;当砂石过滤器和叠片过滤器上积累过多沉积物时,打开排淤口电磁阀,关闭管道电磁阀,可对砂石过滤器和叠片过滤器进行冲洗;
6、所述控制模块包括控制箱和电源管理器,控制箱安装于安装架上,电源管理器安装于控制箱后方,且固定于安装架上;控制箱内设有光伏控制器和恒压调节控制器,电源管理器负责调节光伏和市电之间的供电平衡;
7、所述光伏模块包括光伏面板、光伏逆变器、电池冷却循环器、电池冷却循环管路和电池组;光伏面板安装于安装架顶部,光伏逆变器固定安装架上且位于于控制箱后方;电池组位于主水泵和备用泵之间,其后部顶端装有电池冷却循环器,通过冷却循环水管路与调节罐底部相连;光伏面板通过面板逆变器、电源管理器连接到主水泵和电池组;光伏面板优先供电给主水泵,多余电力存储于电池组;在电池组过热时,电池冷却循环器增大冷却循环管路中的流量;所述电池组上方安装有环境传感器;
8、当光伏模块中的电力不足以维持主水泵正常运行时,电源管理器自动切换到市电供电;
9、所述主水泵通过控制箱内的恒压调节控制器与运行特性传感器相连;运行特性传感器负责监控灌溉模块中的压力和流量数据;恒压调节控制器与调节罐进水电磁阀和调节罐出水电磁阀相连,并根据运行特性传感器数据调控主水泵的转速;当运行特性传感器检测到供水主管内水压过高时,恒压调节控制器会降低主水泵转速;当水压过低时,则增大转速;如水压过高且主水泵调节无效时,恒压调节控制器将打开调节罐进水电磁阀以平衡水压;若水压过低且调节无效时,则恒压调节控制器将打开调节罐出水电磁阀以平衡水压。
10、所述调节罐通过调节罐支架固定于安装架,调节罐顶部设有清洁口,清洁口上盖有清洁口顶盖,调节罐上安装有水位传感器;水位传感器通过控制箱内的恒压调节控制器与调节罐进水电磁阀、调节罐出水电磁阀和管道电磁阀相连;当水位传感器侦测到水位达到预设上限时,水位传感器会向恒压调节控制器发送信号,打开调节罐出水电磁阀,并关闭调节罐进水电磁阀和管道电磁阀;待水位下降至预设的中间水位时,水位传感器会向恒压调节控制器发送信号,关闭调节罐出水电磁阀,并打开管道电磁阀;当水位传感器侦测到水位低于预设的下限时,水位传感器会恒压调节控制器发送信号,打开调节罐进水电磁阀,关闭出水电磁阀;待水位再次上升至预设的中间水位后,继续执行恒压灌溉。
11、所述主水泵、备用泵的底部均设有水泵底座,底座固定于安装架上,主水泵、备用泵均通过水泵底座固定于安装架上。
12、灌溉模块中,所述主水泵与运行特性传感器之间通过控制箱中的中的恒压调节控制器连接;所述运行特性传感器用于监控灌溉模块中的压力和流量数据;所述恒压调节控制器与调节罐进水电磁阀和调节罐出水电磁阀相连,并根据运行特性传感器获取的数据调控主水泵的转速;当运行特性传感器检测到的供水主管中水压太大时,将信号传递给恒压调节控制器,调小主水泵的转速;当所述运行特性传感器检测到供水主管内的水压太小时,将信号传递给恒压调节控制器,调大主水泵的转速;当运行特性传感器检测到供水主管内的水压过大时,且调节主水泵不能缓解供水主管内的水压时,控制箱内的恒压调节控制器打开调节罐进水电磁阀以平衡水压;当运行特性传感器检测到供水主管内的水压过小时,且调节主水泵的流速不能缓解供水主管内的水压时,需要提高供水主管内的压力,恒压调节控制器打开调节罐出水电磁阀以平衡水压;
13、过滤模块位于调节罐进水管前端,灌溉水从进水口吸入后,关闭排淤口电磁阀,打开管道电磁阀,灌溉水会先经砂石过滤器将砂石类的大垃圾过滤,再经叠片过滤器进行细过滤;当砂石过滤器和叠片过滤器积累过多沉积物时,打开排淤口处的电磁阀,关闭打开管道电磁阀,在水流作用下冲洗管道内壁,从排淤口带走大部分的沉积物;
14、光伏模块中,所述光伏逆变器连接通过电源管理器与主水泵和电池组连接,电光伏面板优先为主水泵供电,同时冗余部分的电力会被储存在电池组中;当光照强度不足时,控制箱内的光伏控制器会将电池组会作为电源;电池组后边装有电池冷却循环器,并通过电池冷却循环水管路与调节罐连接;电池组带有温度监测功能,当检测到电池组温度过高时,电池冷却循环泵控制器向电池冷却循环泵发出加大流量的指令,加速电池冷却循环水管路中的冷却循环;
15、控制模块中,控制箱中包含了光伏控制器和恒压调节控制器,电源管理器用于调节光伏和市电之间的平衡。当光伏模块中的电力不足以维持主水泵正常运行时,电源管理器会自动将电源切换成市电;
16、当使用该系统时,首先打开电源管理器的开关。这时,位于控制箱中的恒压调节控制器接收到灌溉的指令,并向主水泵发出启动信号。主水泵根据运行特性传感器提供的实时运行数据,自动调整其转速,以保证恒定的供水压力。在灌溉过程中,灌溉水从进水口被吸入,接着通过砂石过滤器和叠片过滤器进行净化,然后流入供水主管,并通过主水泵送至灌溉送水管,最终达到农作物处完成灌溉。
17、系统还具备一项智能监控功能。当运行特性传感器检测到主水泵出现异常或无法正常运行时,控制箱内的恒压调节控制器会自动将水泵系统切换到备用水泵,确保灌溉过程中的供水压力始终保持恒定。
18、利用一种管道灌溉恒压供水装置进行恒压智能控制方法,采用耦合三零点三极点补偿法和自适应深度森林的智能预测模型(3p3z-idf)对管道灌溉的供水装置进行实时恒压控制,具体步骤如下:
19、s1.获取管道灌溉恒压供水装置的实时运行数据:通过管道灌溉恒压供水装置的进水口所安装的运行特性传感器获取主水泵运行特性实时数据;通过安装在电池组上方的环境传感器传感器获得管道灌溉恒压供水装置运行环境实时数据;通过安装在控制箱中的恒压调节控制器获取主水泵实时控制数据;
20、s2.数据预处理:采用数据清洗算法,对s1获取的管道灌溉恒压供水装置的实时运行数据进行数据清洗;
21、s3.构建样本集:将s2中清洗后的收集到的管道灌溉恒压供水装置实时运行数据进行拆分,其中80%作为训练集和20%测试集,并在训练集中使用数据增强的方法强化训练集;
22、s4.创建恒压控制策略:提出一种耦合三零点三极点补偿和自适应深度森林的智能预测模型3p3z-idf,并通过对极点和零点的参数进行实时调控,实现管道灌溉恒压供水装置的恒压控制,具体方式如下:
23、s4-1.设定一个期望的水压值us,作为主水泵的控制压力;设置初始水压u(0)。u(0)为主水泵的最小输出,以保证系统在启动时有一个稳定的初始状态;
24、s4-2.在任意时间k,测量当前主水泵的水压值ua,并与控制压力us进行比较,得到误差e(k);然后根据两个相邻的误差计算误差增量δe(k),其计算方法公式如下:
25、δe(k)=e(k)-e(k-1) (1)
26、式中,e(k-1)和e(k)为k-1和k时刻水压和期望的水压间的误差,δe(k)为相邻时刻水压误差增量;
27、s4-3.根据实时校验的3p3z-idf智能预测模型,确定零点和极点的技术参数;
28、s4-4.根据确定的零点和极点的技术参数,计算主水泵的控制分量,其传递函数为:
29、
30、式中,k为增益系数;tz1,tz2,tz3为传递函数中的零点;tp1,tp2,tp3为传递函数中的极点,s是拉普拉斯变换中的复数变量;
31、对传递函数g(s)进行离散化,得到主水泵的控制量,计算方法如下:
32、
33、式中,δu(k)为在时刻k的控制增量,是控制器输出的变化量、δe(k)为在时刻k的误差增量,是期望值与实际值之差的变化量、z0,z1,z2,z3为零点控制系数,用于调整误差增量对控制增量的影响、p1,p2,p3为极点控制系数,用于调整过去的控制增量对当前控制增量的影响;
34、s4-5.根据计算得到的控制增量δu(k),实时调整主水泵的输出转速,以改变水压;实时重复执行步骤s4-3到s4-5。
35、s1中,所述运行特性传感器获取主水泵运行特性实时数据包括:水泵转速、流量和实际压力;所述环境传感器传感器获得溉恒压供水装置中的运行环境实时数据包括:装置中的温度和湿度;通过控制箱中的恒压调节控制器获取的水泵实时控制数据包括:输入电流、输入电压、控制压力、控制压力和实际压力的偏差、零点和极点控制参数和输出的控制量。
36、s2中,采用数据清洗算法,对s1获取的管道灌溉恒压供水装置的实时运行数据进行数据清洗,具体计算方式如下:
37、
38、
39、
40、式中,数据点a和数据点b是s1中获取的数据点;d(a,b)是点a与点b到之间的距离;nk(a)是点a的k个最近邻域;w(a,b)是点a和点b之间权重;σ为数据点a和b之间的距离的中位数;wlrdk(a)和wlrdk(b)是数据点a和数据点b的可达密度;wlofk(a)是数据点a的异常因子分数;
41、当数据点a的wlofk(a)值高于95%或小于5%的数据点时视为异常数据,则需要去除掉这个点。
42、s3中,在训练集中随机抽取样本,按以下方式生成该样本的增强样本,并将该增强样本添加至训练集中,其中增强样本的计算方法如下:
43、x'i=xi+λ·sgn(ladv(xi,yi))+r(θ) (7)
44、
45、式中,xi为训练样本;x’i为增强样本;yi为样本xi的真实值;为样本xi的预测值;λ为扰动值;sgn()为符号函数,用于随机设置一个正号或者负号;ladv(xi,yi)为损失函数;r(θ)为一个随机重复向量。
46、s4-3中,3p3z-idf智能预测模型,通过特征扫描模块和训练模块完成对所述3p3z-idf智能预测模型的训练,具体步骤如下:
47、s5-1特征扫描模块;通过创建了不同大小的窗口,在原始训练集上进行滑动扫描,学习其局部特征,将学习后的局部特征进行拼接,最终得到的特征向量;
48、s5-2训练模块;将s5-1得到的特征向量输入本模块中进行训练;输入的特征向量经过每层的集成学习器生成类向量,该层生成的类向量由该层所以学习器生成的多维类向量和原始特征向量拼接构成,并作为下一层的输入;经过层层传递后,直到最后一层作为模型最终输出结果;在当前层的准确率与前一层相比没有提升时,就停止构造下一层,通过调节模型参数得到最优模型;
49、
50、xl+1=[x,ol] (10)
51、其中,是对本层中k个学习器的结果进行连接;hli(xl)是l层中的第i个学习器对本层输入的特征向量xl的处理结果;ol为l层中所有学习器输出的组合;x是原始特征向量;xl+1是l+1层的特征向量;
52、同时,将集成学习器中的超参数作为种群的个体向量,进行差分进化,具体步骤如下:
53、①超参数种群初始化;在搜索空间中随机生成超参数,初始化为初始超参数种群;
54、②个体变异;根据de/currentto-pbest-λ变异策略生成变异个体;其中,de/currentto-pbest-λ的变异方式如下所示:
55、vi,g=xi,g+fi·λ·(xp_best,g-xi,g)+fi·λ·(xr1,g-xr2,g) (11)
56、式中,vi,g为i处的试验向量;xi,g为i处的群体向量;xp_best,g为种群中适应度最好的个体,p∈(0,1);fi为xr1,g和xr2,g相关联的突变因子;λ为一个自适应缩放因子,如果连续几代找到更优解,逐渐增加λ的值,直到一个上限,如果连续几代未见改进,逐渐减小λ,λ的初始化值为0.5;xr1,g和xr2,g为随机选取的两个不同的个体;
57、③交叉操作;通过增加自适应机来提高算法的灵活性;在每代种群中,分别根据变异和交叉的成功率来调整cri和fi两个控制参数;如果fi≥1,则截断为1,如果fi≤0,则重新生成;其公式如下所示:
58、cri=randni(μcr,0.1) (12)
59、μcr=(1-c)·μcr+c·meana(scr) (13)
60、fi=randci(μf,0.1) (14)
61、μf=(1-c)·μf+c·meanl(sf) (15)
62、式中,randni为正态分布的随机操作符、randci为柯西分布的随机操作符、meana为算术平均值;meanl为lehmer平均数、scr是一组所有成功的交叉可能性、sf是所有成功突变因子的集合。μcr和μf分别为scr和sf的移动中心,其初始化值为0.5;c是经验常数;
63、④个体选择;通过比较总熵来计算个体的适应度,选择最小总熵的个体进入下一代种群;
64、
65、
66、式中,n(dl)和n(dr)表示左子节点和右子节点中的数据个数,e(d)为数据集的d熵,c(d)是数据集d中唯一类的集合,p(k)是数据集d中类k的概率;
67、⑤结果更新和输出;当种群满足了适应度,则算法终止;否则,返回步骤②继续进化循环。
68、s4-3中,实时校验,完成训练后,基于s3的验证集通过计算预测误差偏度和预测误差峰度对模型有效性的校验;在模型部署后,持续监控并收集模型的预测结果和实际结果管道灌溉恒压供水装置的实时运行数据,以60分钟为一个评估验证单元,计算预测误差偏度和预测误差峰度;其计算方法如下:
69、ek=yk-y′k (18)
70、
71、
72、
73、式中,ek为第k个测试样本的样本预测误差、yk为第k个测试样本中实际参数、y’k为第k个测试样本对应的预测参数、s为预测误差偏度、k为预测误差峰度、n为测试样本集中测试样本的数量、ek为第k个测试样本的样本预测误差、n为样本数量;
74、若预测误差偏度和或预测误差峰度在[-1,1]之间,则可以确定多个测试样本的样本预测误差符合正态分布,即确定训练出的3p3z-idf预测模型的可靠性较好;若预测误差偏度和或预测误差峰度不在[-1,1]之间,则需要将现有模型作为初始3p3z-idf模型进行再次训练,直至模型预测误差偏度和或预测误差峰度在[-1,1]。
75、通过本发明,公开一种管道灌溉恒压供水装置及其智能控制方法,包括:管道灌溉的恒压供水装置以及恒压智能控制方法。管道灌溉的恒压供水装置包含了灌溉模块、过滤模块、光伏模块和控制模块。智能恒压控制方法通过以下步骤实现灌溉管道的恒压控制:首先获取管道灌溉供水装置的实时运行数据,然后进行数据预处理并构建样本集;提出耦合三零点三极点补偿和自适应深度森林的智能预测模型(3p3z-idf),并实现模型有效性的实时校验与调控。该技术提高了控制系统的精确性和响应速度,同时增强了系统的自适应能力,能够根据环境变化和实时数据自动调整水压。
- 还没有人留言评论。精彩留言会获得点赞!