树栖小型动物捕捉收集装置及捕捉收集方法与流程
本发明涉及树栖小型动物捕捉,特别是一种树栖小型动物捕捉收集装置及捕捉收集方法。
背景技术:
1、野外树栖小型动物的捕捉通常使用长杆捕虫网,通常需要两个人辅助协作才能完成采集,并且这种传统的方法效率、精准度和成功率都比较低、且耗时耗力,这些均不利于科研工作者对树栖小型动物进行野外采集。
2、有的树栖假死性昆虫,例如甲虫,尺蠖、毛虫、蝽的成虫、粘虫的幼虫等,受到侵害时,立即呈麻痹状态,从树上掉到地面上。由于天敌对“死亡”不动的猎物或寄主不敢兴趣,或者无法定位,降低了这类昆虫被捕食的几率,所以假死其实是昆虫的一种防御策略。发明人发现科研工作者可以利用树栖昆虫这种假死习性进行野外采集。
技术实现思路
1、本发明的目的是提供一种树栖小型动物捕捉收集装置及捕捉收集方法,尤其是针对树栖式昆虫,以解决上述现有技术存在的问题,提高捕捉效率。
2、为实现上述目的,本发明提供了如下方案:
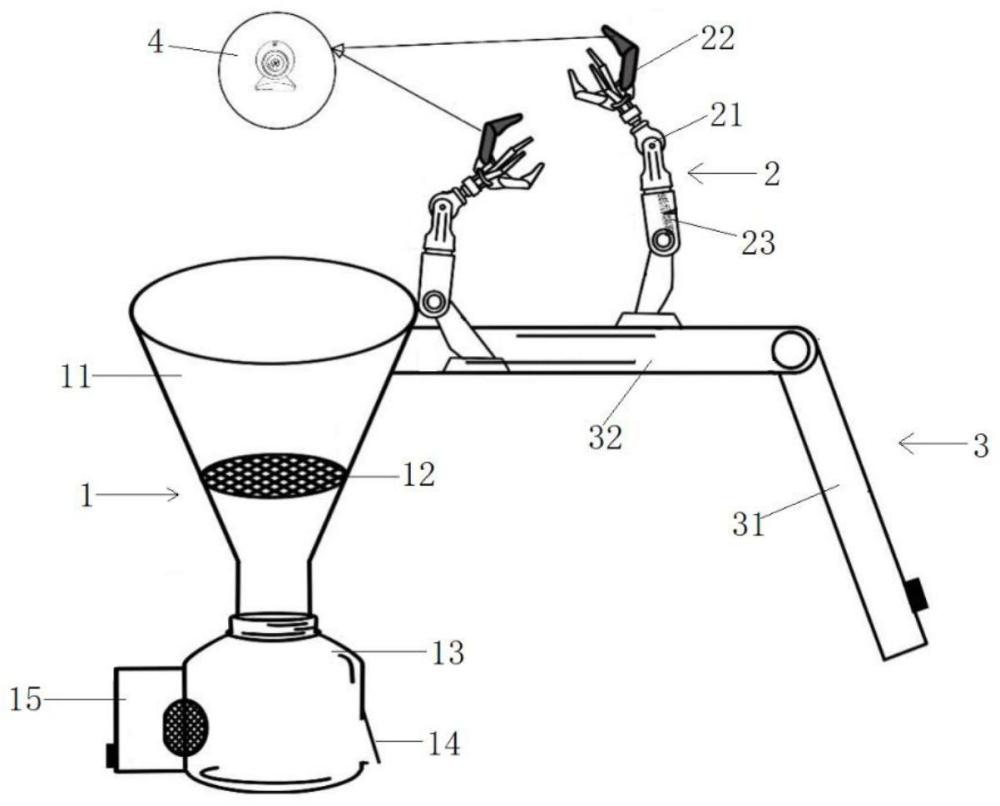
3、本发明提供一种树栖小型动物捕捉收集装置,包括:收集装置和振动发生装置,所述振动发生装置用于使树枝产生振动,即产生掉落的力,同时刺激具有假死习性的昆虫使其产生应激反应后自动掉落,所述收集装置具备一个收集口,所述收集口用于设置于所述树枝的正下方并用于接收自所述树枝上掉落的目标小型动物。
4、优选的,还包括负压产生装置,所述收集装置包括收集瓶和漏斗状的收集口,所述收集瓶位于所述收集口下方并于所述收集口的底部连通,所述负压产生装置的抽气口与所述收集瓶连通,所述负压产生装置抽气使得所述收集瓶和所述收集口处产生负压吸力。
5、优选的,所述振动发生装置包括振动装置、机械臂和控制器,所述振动装置和所述机械臂均由所述控制器控制工作,所述机械臂设置于所述振动装置的振动端,所述控制器能够控制所述机械臂的机械爪抓握住树枝并控制所述振动装置进行振动。
6、优选的,还包括摄像头,所述控制器还能够控制所述机械爪实施抓取动作,所述摄像头设置于所述机械臂上,所述摄像头用于录取所述树枝上的图像信息并在用户的手机端进行显示,当目标树枝上的目标小型动物数量少于预定数量阈值时,用户通过所述控制器控制所述机械臂对所述目标小型动物进行一一抓握捕捉,当数量不少于预定数量阈值时,用户则通过所述控制器控制所述机械臂抓握树枝并控制所述振动装置进行振动,抖落树枝上的所述目标小型动物使其掉落入所述收集口。
7、优选的,所述收集口内部设置有一个筛网,使所述目标小型动物与树叶、树枝等杂质分离。
8、优选的,所述收集装置、机械臂和振动装置均设置于一个支撑机构上,所述支撑机构为便携式支撑机构。
9、优选的,所述支撑机构为手持杆,所述手持杆的一端为手持端,另一端可拆卸设置有一个横杆,所述收集装置可拆卸设置于所述横杆远离所述手持杆的一端;所述手持杆为伸缩杆且可拆卸设置于所述横杆的另一端,所述手持杆与所述横杆之间的角度可调节。
10、优选的,所述机械臂和所述振动装置均设置有两个,两个所述机械臂的机械爪上均设置有一个摄像头。
11、优选的,所述振动装置能够沿着所述横杆的长度方向滑动地设置于所述横杆上,且由横移驱动装置驱动横移,用户通过控制器控制所述横移驱动装置驱动所述振动装置带动所述机械臂横移。
12、本发明还提供了一种树栖小型动物捕捉收集方法,包括:先查看树枝上目标小型动物的数量,当目标小型动物数量小于n时,即逐个抓取目标小型动物,当目标小型动物数量不小于n时,即振动目标树枝以使得目标小型动物自目标树枝上掉落并掉落至预先设置于树枝下方的收集口内。
13、本发明相对于现有技术取得了以下技术效果:
14、本发明提供的树栖小型动物捕捉收集装置通过振动发生装置来使得树枝产生振动,抖落树上的小型动物,同时还能刺激假死性昆虫产生应激反应“死亡”掉落,起到快速捕捉小型动物的目的。本发明提供的方案方便了工作人员对树枝高处小型动物进行精准或者大批量捕捉,还能提高树栖小型动物的捕捉效率、准确度和成功率,省时省力,并且本发明提供的捕捉收集装置简单便携,方便野外树栖小型动物的采集。
技术特征:
1.一种树栖小型动物捕捉收集装置,其特征在于:包括:收集装置和振动发生装置,所述振动发生装置用于使树枝产生振动,即产生掉落的力,同时刺激具有假死习性的昆虫使其产生应激反应后自动掉落,所述收集装置具备一个收集口,所述收集口用于设置于所述树枝的正下方并用于接收自所述树枝上掉落的目标小型动物。
2.根据权利要求1所述的树栖小型动物捕捉收集装置,其特征在于:还包括负压产生装置,所述收集装置包括收集瓶和漏斗状的收集口,所述收集瓶位于所述收集口下方并于所述收集口的底部连通,所述负压产生装置的抽气口与所述收集瓶连通,所述负压产生装置抽气使得所述收集瓶和所述收集口处产生负压吸力。
3.根据权利要求1所述的树栖小型动物捕捉收集装置,其特征在于:所述振动发生装置包括振动装置、机械臂和控制器,所述振动装置和所述机械臂均由所述控制器控制工作,所述机械臂设置于所述振动装置的振动端,所述控制器能够控制所述机械臂的机械爪抓握住树枝并控制所述振动装置进行振动。
4.根据权利要求3所述的树栖小型动物捕捉收集装置,其特征在于:还包括摄像头,所述控制器还能够控制所述机械爪实施抓取动作,所述摄像头设置于所述机械臂上,所述摄像头用于录取所述树枝上的图像信息并在用户的手机端进行显示,当目标树枝上的目标小型动物数量少于预定数量阈值时,用户通过所述控制器控制所述机械臂对所述目标小型动物进行一一抓握捕捉,当数量不少于预定数量阈值时,用户则通过所述控制器控制所述机械臂抓握树枝并控制所述振动装置进行振动,抖落树枝上的所述目标小型动物使其掉落入所述收集口。
5.根据权利要求2所述的树栖小型动物捕捉收集装置,其特征在于:所述收集口内部设置有一个筛网,使所述目标小型动物与树叶、树枝等杂质分离。
6.根据权利要求3所述的树栖小型动物捕捉收集装置,其特征在于:所述收集装置、机械臂和振动装置均设置于一个支撑机构上,所述支撑机构为便携式支撑机构。
7.根据权利要求6所述的树栖小型动物捕捉收集装置,其特征在于:所述支撑机构为手持杆,所述手持杆的一端为手持端,另一端设置有一个横杆,所述收集装置可拆卸设置于所述横杆远离所述手持杆的一端;所述手持杆为伸缩杆且可拆卸设置于所述横杆的另一端,所述手持杆与所述横杆之间的角度可调节。
8.根据权利要求7所述的树栖小型动物捕捉收集装置,其特征在于:所述机械臂和所述振动装置均设置有两个,两个所述机械臂的机械爪上均设置有一个摄像头。
9.根据权利要求7所述的树栖小型动物捕捉收集装置,其特征在于:所述振动装置能够沿着所述横杆的长度方向滑动地设置于所述横杆上,且由横移驱动装置驱动横移,用户通过控制器控制所述横移驱动装置驱动所述振动装置带动所述机械臂横移。
10.一种树栖小型动物捕捉收集方法,其特征在于:包括:先查看树枝上目标小型动物的数量,当目标小型动物数量小于n时,即逐个抓取目标小型动物,当目标小型动物数量不小于n时,即振动目标树枝以使得目标小型动物自目标树枝上掉落并掉落至预先设置于树枝下方的收集口内。
技术总结
本发明公开了一种树栖小型动物捕捉收集装置及捕捉收集方法,涉及树栖小型动物,尤其是树栖式昆虫的野外捕捉技术领域。树栖小型动物捕捉收集装置包括收集装置和振动发生装置,振动发生装置用于使树枝产生振动,即产生掉落的力,同时刺激具有假死习性的昆虫使其产生应激反应后自动掉落,收集口设置于树枝的正下方并用于接收自树枝上抖落的目标树栖小型动物。本发明还提供了一种树栖小型动物捕捉收集方法,即依据观察到的树枝上目标小型动物的数量,选择逐个抓取法或者振动掉落法。本发明提供的捕捉收集装置简单便携,且提供的捕捉方案能使工作人员省时省力地采集到树枝高处的小型动物,还能提高树栖小型动物的捕捉效率、准确率及成功率。
技术研发人员:张彦静,马方舟,万雅琼,王晨彬,陈菁,斯琴,施筱迪,谢锐
受保护的技术使用者:生态环境部南京环境科学研究所
技术研发日:
技术公布日:2024/2/6
- 还没有人留言评论。精彩留言会获得点赞!