一种基于传感器的深松机智能深度调整系统的制作方法
本发明属于农业耕作,具体涉及一种基于传感器的深松机智能深度调整系统。
背景技术:
1、深松机是一种与大马力拖拉机配套使用的耕作机械,主要用于行间或全方位的深层土壤耕作的机械化翻整。它通过深松铲等工具,对土壤进行深层的松动和破碎,打破犁底层,增加土壤的透气性和渗水性,提高土壤的肥力和保水能力,促进粮食增长。
2、深松机在作业时,农户根据当地犁底层情况,然后根据种植经验选择合适的高度位置安装深松铲进行作业,但是由于当地气象环境的变化,土地在一段时间内的状况也不同,仅凭农户的经验确定深松铲的深度,不够准确,容易出现误差;另外由于耕作区域的土地面积较大,而不同位置的土壤状况可能有所差距,若区域内土壤的状况差值较大,在种植后,后续农作物的产能状况不同,会造成一定的经济损失。
技术实现思路
1、本发明的目的在于提供一种基于传感器的深松机智能深度调整系统,用以解决上述背景技术中所面临的问题。
2、本发明的目的可以通过以下技术方案实现:
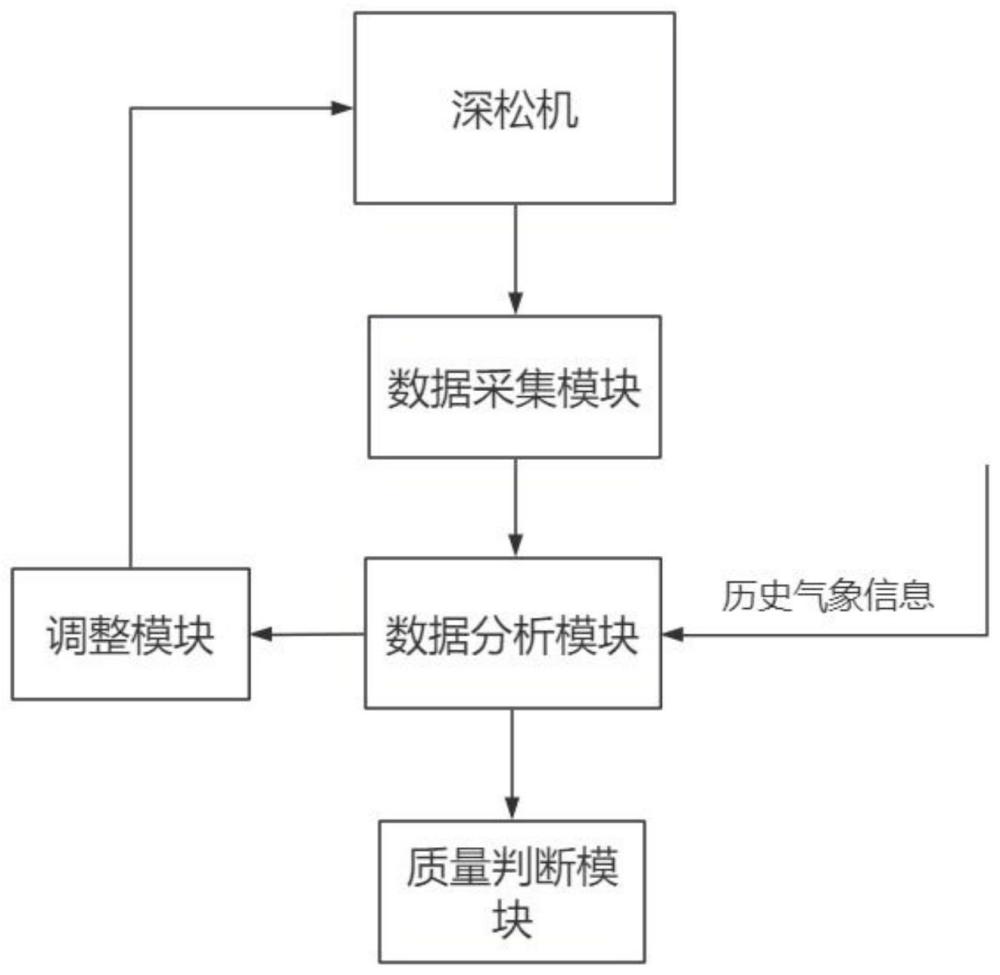
3、一种基于传感器的深松机智能深度调整系统,所述系统包括:
4、深松机,所述深松机上安装有用于调整深松铲深度的液压驱动缸;
5、数据采集模块,所述数据采集模块安装在深松机上,用于采集耕作区域的相关参数信息;
6、数据分析模块,所述数据分析模块根据当地历史气象信息结合相关参数信息对土壤状况进行分析,并判断是否生成调整指令;
7、调整模块,所述调整模块用于接收调整指令,并根据调整指令控制深松机上的液压驱动缸伸缩,来调整深松铲的深度。
8、进一步地,所述历史气象信息包括降水信息、温度信息、湿度信息,所述相关参数信息包括耕作区域的土壤硬度信息以及深松机移动速度信息。
9、进一步地,所述数据分析模块进行分析的方法为:
10、获取工作日前三十天的平均降水量rw、前三十天内的高温天数rt、前三十天内的高湿天数rs以及土壤的硬度值yy;
11、通过公式求出土壤状况值jk;
12、将获得的土壤状况值jk与系统预设的标准状况阈值区间[jkx,jky]进行对比:
13、若jk∈[jkx,jky],则不生成调整指令;
14、否则,生成调整指令;
15、其中α1以及α2为权重系数,rh为系统预设的标准降水量值,m为土壤阻力系数。
16、进一步地,所述土壤阻力系数获取的方法为:
17、根据深耕机历史工作数据,确定一个参照阻力值f,以及在该参照阻力值下深松机工作时的移动速度vf;
18、获取深松机在试运行工作期间的移动速度随时间变化曲线v(t);
19、从而通过公式求出土壤阻力系数m;
20、其中,t1为深松机试运行工作开始时间,t2为深松机试运行工作结束时间。
21、进一步地,所述调整指令包括调深指令以及调浅指令,所述调深指令用于增加深松铲的深度,所述调浅指令用于减少深松铲的深度。
22、进一步地,所述调深指令以及调浅指令获取的方法为:
23、当jk∈(0,jkx)时,生成调浅指令,通过公式将深度调整至lup;
24、当jk∈(jky,+∞)时,生成调深指令,通过公式将深度调整至ldown;
25、其中,a为系统预设的参照底数,且0<a<1,l为深松铲当前深度,l0为系统所允许的最大深度调整量。
26、进一步地,所述系统还包括质量判断模块,所述质量判断模块用于根据获取的土壤状况值,来对耕作区域的土地质量进行评判。
27、进一步地,对耕作区域的土地质量进行评判的方法为:
28、根据耕作区域范围,将耕作区域划分为多个抽取区域,抽取各个区域下检测的平均土壤状况值yyi;
29、通过公式求出质量系数q;
30、将获得的质量系数q与系统预设的阈值系数qth进行比较:
31、当q∈(qth,+∞)时,则表明耕作区域的土地质量较差;
32、当q∈(0,qth]时,则表明耕作区域的土地质量较好;
33、其中,n为抽取区域的个数,为抽取的平均土壤状况值的平均值,i∈[1,n]。
34、本发明的有益效果:
35、本发明通过采集耕作区域的当日与土壤有关的参数信息结合当地的历史气象信息进行综合分析,可以准确的得出耕作区域的土壤状况值,并将获得的土壤状况值与系统预设的标准状况阈值区间进行比较,可判断设置的深松铲深度是否合格,并对不合格的深度进行相应的调整。
36、本发明可以根据土壤状况值与标准区间之间的差值情况进行分析,来相应的对深松铲的深度进行智能调整,以确保农作物的正常生长。
37、本发明可以根据检测出的土壤状况值,去判断整个区域内的土壤状况变化波动情况,以便于及时的根据土壤状况值去了解耕作区域的土地质量情况,从而对症下药,减少后续农作物损失。
38、当然,实施本发明的任一产品并不一定需要同时达到以上所述的所有优点。
技术特征:
1.一种基于传感器的深松机智能深度调整系统,其特征在于,所述系统包括:
2.根据权利要求1所述的一种基于传感器的深松机智能深度调整系统,其特征在于,所述历史气象信息包括降水信息、温度信息、湿度信息,所述相关参数信息包括耕作区域的土壤硬度信息以及深松机移动速度信息。
3.根据权利要求2所述的一种基于传感器的深松机智能深度调整系统,其特征在于,所述数据分析模块进行分析的方法为:
4.根据权利要求3所述的一种基于传感器的深松机智能深度调整系统,其特征在于,所述土壤阻力系数获取的方法为:
5.根据权利要求4所述的一种基于传感器的深松机智能深度调整系统,其特征在于,所述调整指令包括调深指令以及调浅指令,所述调深指令用于增加深松铲的深度,所述调浅指令用于减少深松铲的深度。
6.根据权利要求5所述的一种基于传感器的深松机智能深度调整系统,其特征在于,所述调深指令以及调浅指令获取的方法为:
7.根据权利要求6所述的一种基于传感器的深松机智能深度调整系统,其特征在于,所述系统还包括质量判断模块,所述质量判断模块用于根据获取的土壤状况值,来对耕作区域的土地质量进行评判。
8.根据权利要求7所述的一种基于传感器的深松机智能深度调整系统,其特征在于,对耕作区域的土地质量进行评判的方法为:
技术总结
本发明公开了一种基于传感器的深松机智能深度调整系统,属于农业耕作技术领域,包括:深松机,深松机上安装有用于调整深松铲深度的液压驱动缸;数据采集模块,用于采集耕作区域的相关参数信息;数据分析模块,对当地历史气象信息结合采集的相关参数信息对土壤状况进行分析,并判断是否生成调整指令;调整模块,根据调整指令控制深松机上的液压驱动缸伸缩,来调整深松铲的深度。本发明通过采集耕作区域的当日与土壤有关的参数信息结合当地的历史气象信息进行综合分析,可以准确的得出耕作区域的土壤状况值,并与系统预设的标准状况阈值区间进行比较,来判断的深松铲深度,并可对深松铲深度进行相应调整。
技术研发人员:孙同珍
受保护的技术使用者:青岛普兰泰克机械科技有限公司
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!