一种叶菜收获机割台仿形调节装置及调节方法
本发明属于蔬菜收获机自动控制,尤其涉及一种叶菜收获机割台仿形调节装置及调节方法。
背景技术:
1、叶类蔬菜生产的整地、育苗、播种、移栽、植保等环节的机械化程度相对较高,收获环节仍以人工采摘方式为主,效率低、劳动强度大、成本高。
2、割台仿形是保证叶菜收获性能的重要技术,现有的叶菜收获机割台调节主要是通过人工调节割台的离地高度,依赖于操作员的操作经验,稳定性差,割台位置过高,造成叶类蔬菜的少割漏割,割台位置过低,又容易导致割刀铲土,造成割刀崩刀、石砾卡刀等情况。目前一些关于叶菜收获机割台仿形调节的研究,主要采用仿形轮或仿形板等测量割台两端离地高度,即仿形轮或仿形板与垄面接触,根据其位置或形变获得离地高度。
3、而在实际收获作业时,受到长时间的土壤沉降、风蚀等因素的影响,垄面是不平整的。接触式测量不可避免地会造成垄面土壤形变,尤其是在松软的土床环境下还会受到土块、蔬菜留茬等随机干扰的影响,难以保证测量精度,割台仿形控制稳定性低。
4、目前也有采用激光式非接触测量方式,由于其测量的是点信号,即垄面某一点到传感器的距离,也容易受到土块、留茬等因素的干扰,也无法保证实际的测量精度。
技术实现思路
1、针对上述技术问题,本发明的一个方式的目的之一是提供一种叶菜收获机割台仿形调节装置,通过收获部件机架上的超声波传感器检测垄面信息,控制器可以调整电动缸伸缩量,实现割台高度和姿态角的二自由度调节,完成割台收获叶菜时的仿形调整。
2、本发明的一个方式的目的之一是提供一种叶菜收获机割台仿形调节方法,通过分析完整的超声波反射信号,进行垄面距离和垄面粗糙度的测量;构建超声波传感器测量的垄面距离和收获机结构计算割台的高度和姿态角,将其作为输入参数,设计割台高度调节模糊控制器和割台姿态角调节模糊控制器,将土壤表面粗糙度作为依据进行割台高度目标的自适应调整,确定两个电动缸的伸缩量,实现割台离地高度和割台姿态角的自适应仿形。通过垄面距离和垄面粗糙度的测量,避免了非接触式测量时土块大小、松软土床及蔬菜留茬等随机干扰对测量精度的影响,保证了测量精度的稳定性,提高了割台仿形调整的精度,进而提高了叶菜收获的质量。
3、注意,这些目的的记载并不妨碍其他目的的存在。本发明的一个方式并不需要实现所有上述目的。可以从说明书、附图、权利要求书的记载中抽取上述目的以外的目的。
4、本发明是通过以下技术手段实现上述技术目的的。
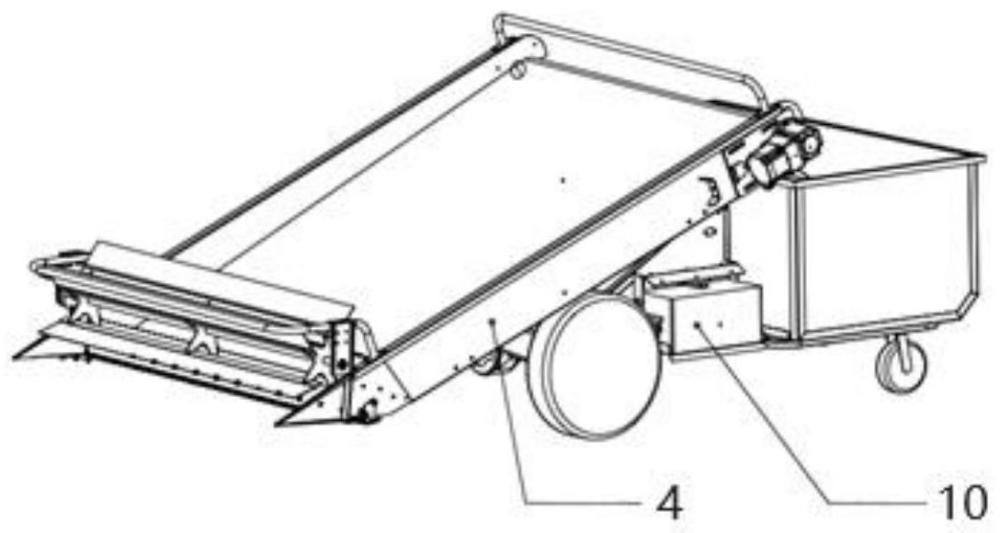
5、一种叶菜收获机割台仿形调节装置,包括底盘行走部件、收获部件机架和控制器;
6、所述收获部件机架设于底盘行走部件上;
7、所述收获部件机架上设有割刀,收获部件机架底部设有第一超声波传感器和第二超声波传感器;
8、所述收获部件机架的一端通过第一电动缸和第二电动缸与底盘行走部件前端连接,收获部件机架的另一端与底盘行走部件后端连接;;
9、所述控制器分别与第一电动缸、第二电动缸、第一超声波传感器和第二超声波传感器连接,通过第一超声波传感器和第二超声波传感器检测信息的回波信息获取垄面p的垂直距离d和垄面p的粗糙度ssr,调整第一电动缸和第二电动缸活塞杆长度。
10、上述方案中,所述控制器根据第一超声波传感器和第二超声波传感器检测的回波信息获取垄面p的垂直距离d和垄面p的粗糙度ssr,并根据第一超声波传感器、第二超声波传感器的安装位置建立收获部件机架的平面方程,从而确定割刀的高度与姿态角,然后建立第一电动缸和第二电动缸与割刀的高度与姿态角的关系方程,再通过割台姿态角控制模型和割台高度控制模型调整第一电动缸和第二电动缸的活塞杆伸缩长度,从而调整割刀的高度与姿态角。
11、一种上述的叶菜收获机割台仿形调节装置的调节方法,包括以下步骤:
12、步骤s1:控制器根据第一超声波传感器和第二超声波传感器的回波信号计算与垄面p的垂直距离d和垄面p的粗糙度ssr;
13、步骤s2:根据步骤s1检测的第一超声波传感器和第二超声波传感器与垄面p的距离,建立坐标系,获得收获部件机架在坐标系的平面方程;
14、步骤s3:根据步骤s2获得的收获部件机架在坐标系的平面方程,建立割刀1轴线l的直线方程,得到轴线l与垄面p的夹角,即姿态角α,以及轴线l中心位置与垄面p的垂直距离,即切割高度h;
15、步骤s4:获取第一电动缸活塞杆长度l1、第二电动缸的活塞杆长度l2,根据步骤s3获取的姿态角α和切割高度h,建立姿态角α和切割高度h与第一电动缸活塞杆长度l1和第二电动缸活塞杆长度l2的关系方程;
16、步骤s5:建立割台姿态角控制模型和割台高度控制模型;
17、步骤s6:根据步骤s1获取的垄面p的粗糙度ssr,调整设定的目标切割高度h0;
18、步骤s7:根据步骤s6获取的目标切割高度h0,根据割台姿态角控制模型计算高度调节量δh,根据割台姿态角模糊控制器计算割台姿态角调节量δα;
19、步骤s8:根据步骤s7获取的高度调节量δh和割台姿态角调节量δα,通过姿态角α和切割高度h与第一电动缸活塞杆长度l1和第二电动缸活塞杆长度l2的关系方程,求得第一电动缸和第二电动缸的调节量,并进行调节。
20、上述方案中,所述步骤s1检测第一超声波传感器和第二超声波传感器与垄面p的垂直距离和垄面p的粗糙度ssr时,分别提取反射波峰值时间间隔tp、反射波强度周期积分er、中值时间宽度tm和反射波峰值vmax。
21、进一步的,所述步骤s1检测第一超声波传感器和第二超声波传感器与垄面p的垂直距离时,采用以下公式:
22、d=k·tp
23、其中,k为与超声波传播速度相关的常系数。
24、进一步的,所述步骤s1检测垄面p的粗糙度ssr时采用以下步骤:
25、步骤s1.1:通过激光扫描仪测量垄面p的点云信息,并根据以下公式计算表面粗糙度ssr:
26、
27、其中,vi为激光扫面仪与测量点间的距离,为激光扫面仪与所有测量点之间的平均距离;
28、步骤s1.2:重复步骤s1,建立表面粗糙度样本库ssri;
29、步骤s1.3:根据超声波传感器检测的垄面p信息,建立峰值时间间隔tp、中值时间宽度tm、中值时间宽度tm和反射波峰值vmax的样本库{tp,tm,tm,vmax}i;
30、步骤s1.4:将样本库{tp,tm,tm,vmax}i作为自适应模糊神经网络的输入,将表面粗糙度样本库ssri作为自适应模糊神经网络的输出,对自适应模糊神经网络进行训练,直到自适应模糊神经网络误差满足设定范围;
31、步骤s1.5:将第一超声波传感器和第二超声波传感器检测的反射波峰值时间间隔tp、反射波强度周期积分er、中值时间宽度tm和反射波峰值vmax输入至训练后的自适应模糊神经网络中,得到土壤表面粗糙度ssr。
32、上述方案中,所述步骤s4姿态角α和切割高度h与第一电动缸活塞杆长度l1和第二电动缸活塞杆长度l2的关系方程如下:
33、
34、上述方案中,所述步骤s5中姿态角控制模型为二维模糊控制模型,姿态角控制模型的输入为割台姿态角偏差eα和割台姿态角偏差变化率ecα,所述割台姿态角偏差eα和割台姿态角偏差变化率ecα由实时切割高度ht,计算得到实时的切割姿态角αt,再与目标切割姿态角比较得出;
35、所述割台姿态角偏差eα的变化范围包括七个等级,分别为[-45°,-10°]、[-10°,-5°]、[-5°,-2°]、[-2°,2°]、[2°,5°]、[5°,10°]和[10°,45°];
36、所述割台姿态角偏差变化率ecα由采样频率和设定eα得出其变化范围;割台姿态角偏差变化率eca=(上一时刻的割台姿态角偏差ea-这一时刻的割台姿态角偏差ea)/采样频率;
37、所述姿态角控制模型的输出为割台姿态角调节量δα。
38、上述方案中,所述步骤s5中割台高度控制模型为二维模糊控制模型,割台高度控制模型的输入为割台高度偏差eh和割台高度偏差变化率ech,所述割台高度偏差eh和割台高度偏差变化率ech由实时切割高度ht与目标切割高度h0比较得出;
39、所述割台高度偏差eh的的变化范围包括七个等级,分别为[-h0,-0.5h0]、[-0.5h0,-0.25h0]、[-0.25h0,-0.1h0]、[-0.1h0,0.1h0]、[0.1h0,0.25h0]、[0.25h0,h0]和[h0,5h0];
40、所述割台高度偏差变化率ech由采样频率和目标切割高度h0得出其变化范围;割台高度偏差变化率ech=(上一时刻的割台高度偏差eh-这一时刻的割台高度偏差eh)/采样频率;
41、所述割台高度控制模型的输出为割台姿态角调节量δα。
42、上述方案中,所述步骤s6中调整设定的目标切割高度h0采用如下公式:
43、h0=h'0+ω·ssr
44、其中,h'0为调整之前的目标切割高度,ω为设定系数,ω>0。
45、与现有技术相比,本发明的有益效果是:
46、根据本发明的一个方式,在叶菜收获机底盘机架两侧安装超声波传感器,进行垄面的土壤表面粗糙度及其与割台的平均距离非接触式测量,由于超声波传感器检测范围为一定的圆形区域,相较于单点距离测量,被探测的圆形区域能够更好的表征被测土壤表面的实际特征,能够减小因垄面不平带来的测量结果的随机性,提高测量稳定性。
47、根据本发明的一个方式,本发明根据超声波传感器检测得到的土壤表面粗糙度实时调节割台离地高度的目标值和自适应调节割台高度模糊控制器的输入参数范围,从而根据土壤表面情况自适应调节割台离地高度,提高整机在不同土壤表面粗糙度作业环境下仿形收获作业性能,具备广泛的适用性。
48、注意,这些效果的记载不妨碍其他效果的存在。本发明的一个方式并不一定必须具有所有上述效果。可以从说明书、附图、权利要求书等的记载显而易见地看出并抽出上述以外的效果。
- 还没有人留言评论。精彩留言会获得点赞!