一种多瓣式挖树机的制作方法
本技术涉及挖树,特别是一种多瓣式挖树机。
背景技术:
1、近年来,环保概念越来越被人们所重视,正所谓:“绿水青山就是金山银山”,植树造林是保护环境的一项重要手段。在进行植树造林时,往往会需要对树木进行移栽,大规模的移栽时便需要用到挖树机。
2、如授权公告号为cn216505155u的一种挖树机器人,通过设置大臂、小臂、挖树头,配合底座、齿轮以及若干驱动装置,使挖树头可以先将树木抱拢,然后多瓣式挖铲在驱动组件的带动下下铲,而后便可将带有土球的树木连根挖起,大大提高了挖树效率。但该装置在挖树时,树干部位欠缺支撑,树木在被上抬及移动过程中有侧翻的可能。另外,在挖树完成对树木进行暂时放置时,随着支架的打开,树木会直接翻倒,有可能造成树枝折断、土球散落的问题,影响移栽后树木的存活率。为此,提出一种多瓣式挖树机,作以改进。
技术实现思路
1、本实用新型的目的旨在至少解决所述技术缺陷之一。
2、为此,本实用新型的一个目的在于提出一种多瓣式挖树机,以解决背景技术中所提到的问题,克服现有技术中存在的不足。
3、为了实现上述目的,本实用新型一方面的实施例提供一种多瓣式挖树机,包括基座;其特征在于,所述基座上转动连接有大臂,所述大臂两侧设置有大臂驱动,所述大臂末端转动连接有小臂,所述小臂顶部设置有小臂驱动,所述小臂的上部设置有抱合气缸,所述抱合气缸的活塞杆末端固定连接有抱合架,所述抱合架顶面设置有抱合电机,所述抱合架内设置有外环和内环,所述外环和内环的顶面及底面均设置有齿条,所述小臂底部固定连接有环架,所述环架上部设置有下铲驱动,所述下铲驱动的输出端固定连接有挖铲。
4、由上述任一方案优选的是,所述基座内设置有转动驱动组,所述大臂为弧形。
5、由上述任一方案优选的是,所述大臂驱动底部转动连接在基座顶部,所述小臂驱动末端转动连接在大臂的顶面。
6、采用上述技术方案:基座用以为上部结构提供安装平台,基座可以被安装固定在车辆上,以便带动装置移动。基座内的转动驱动组用以带动上部结构转动,以调整作业方向,使装置更加灵活方便。弧形大臂用以为小臂提供安装平台,同时,为小臂传递动能。大臂驱动用以驱动大臂调整方向,随着大臂角度的调整,挖树结构会跟随大臂上下移动。小臂用以安装挖树结构及抱合结构,小臂驱动用以带动小臂转动,小臂转动会带动挖树结构前后移动,使得挖树结构可以根据需要进行竖向和水平的移动并能够进行旋转,增加装置的适用性。
7、由上述任一方案优选的是,所述外环的左端及内环的右端均设置有卡条,所述外环和内环均为半圆形。
8、由上述任一方案优选的是,所述抱合电机的输出轴的上部及底端均固定连接有齿轮,所述抱合架、外环以及内环的内侧面均开设有粗糙纹。
9、采用上述技术方案:抱合气缸用以带动抱合架前后移动,抱合架用以安装抱合组件,抱合电机用以带动外环和内环转动,外环和内环则可以从侧面伸出将树干抱住,防止在挖树过程中树木发生侧倾导致翻倒。具体的,在将装置调整至合适位置后,控制抱合气缸向前推动抱合架,使抱合架从侧面抵住树干,然后启动抱合电机,抱合电机的输出轴通过齿轮带动外环、内环顶底两端的齿条移动,外环和内环分别从抱合架的两侧伸出,将树干抱拢,对树干形成侧面约束,避免树干翻倒。在放下树木时,可以通过控制抱合气缸逐渐将树木放倒,可以避免树木直接翻倒导致土球散落的问题。外环和内环端部的卡条可以避免二者从抱合架中脱离,抱合架、外环以及内环的内侧面的粗糙纹可以增加它们与树干之间的摩擦力,使树干更加稳定。
10、由上述任一方案优选的是,所述环架的外侧设置有开口,所述环架内侧设置有开合气缸。
11、由上述任一方案优选的是,所述下铲驱动和挖铲各有四个,所述挖铲活动连接在环架外侧。
12、采用上述技术方案:环架用以安装挖树组件,环架的外侧开口,使其可以在开合气缸的带动下开合,由此便可对树木进行抱拢,然后再从四周对树木挖出。下铲驱动设置在环架的上部,用以带动挖铲上下移动进行挖树,挖铲则用以向下切土,并在土下抱拢,将树木连同土球一起带出。四组下铲驱动和挖铲使装置可以从四面对树木进行合围,从而保证挖树过程中树木的平衡。在将装置移动至合适位置后,通过开合气缸控制环架打开,然后通过小臂驱动向前推动小臂,使环架将套在树木外,然后再通过开合气缸使环架闭合,通过下铲驱动带动挖铲向下切土,而后便可通过大臂驱动控制大臂向上抬起,挖铲便会将树木连同土球一起带出。
13、与现有技术相比,本实用新型所具有的优点和有益效果为:
14、1、该多瓣式挖树机,通过在小臂上部设置抱合气缸,并在抱合气缸的活塞杆末端设置抱合架,配合抱合电机、外环、内环以及齿条和齿轮,使装置在进行挖树工作时,可以通过控制抱合气缸向前推动抱合架,使抱合架从侧面抵住树干,然后启动抱合电机,抱合电机的输出轴通过齿轮带动外环、内环顶底两端的齿条移动,外环和内环分别从抱合架的两侧伸出,将树干抱拢,对树干形成侧面约束,避免树木翻倒,使挖树工作更加安全稳定。
15、2、该多瓣式挖树机,通过设置抱合气缸,配合抱合架、外环和内环,在挖树完成后放置树木时,可以通过控制抱合气缸的活塞杆逐渐向外伸长来控制树木的侧倾,外环和内环从外侧将树干抱拢,使树木逐渐倾斜,在树木倾斜到合适角度后,控制抱合电机带动外环和内环向抱合架内收缩,使树木翻倒。可以减小放置树木时对树木的损上,避免土球散落,提高树木移栽的存活率。
16、本实用新型附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本实用新型的实践了解到。
技术特征:
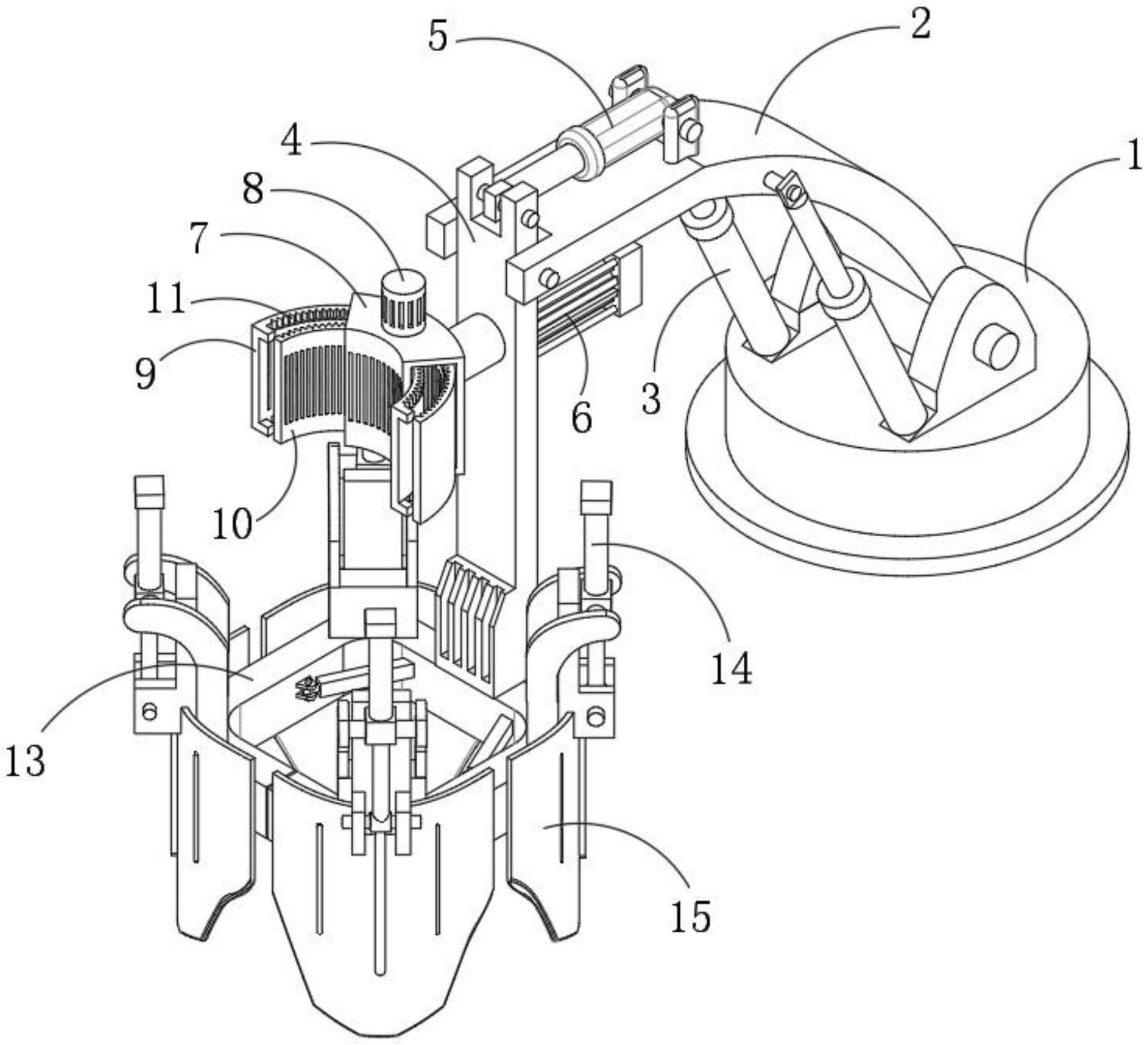
1.一种多瓣式挖树机,包括基座(1);其特征在于,所述基座(1)上转动连接有大臂(2),所述大臂(2)两侧设置有大臂驱动(3),所述大臂(2)末端转动连接有小臂(4),所述小臂(4)顶部设置有小臂驱动(5),所述小臂(4)的上部设置有抱合气缸(6),所述抱合气缸(6)的活塞杆末端固定连接有抱合架(7),所述抱合架(7)顶面设置有抱合电机(8),所述抱合架(7)内设置有外环(9)和内环(10),所述外环(9)和内环(10)的顶面及底面均设置有齿条(11),所述小臂(4)底部固定连接有环架(13),所述环架(13)上部设置有下铲驱动(14),所述下铲驱动(14)的输出端固定连接有挖铲(15)。
2.如权利要求1所述的一种多瓣式挖树机,其特征在于:所述基座(1)内设置有转动驱动组,所述大臂(2)为弧形。
3.如权利要求2所述的一种多瓣式挖树机,其特征在于:所述大臂驱动(3)底部转动连接在基座(1)顶部,所述小臂驱动(5)末端转动连接在大臂(2)的顶面。
4.如权利要求3所述的一种多瓣式挖树机,其特征在于:所述外环(9)的左端及内环(10)的右端均设置有卡条,所述外环(9)和内环(10)均为半圆形。
5.如权利要求4所述的一种多瓣式挖树机,其特征在于:所述抱合电机(8)的输出轴的上部及底端均固定连接有齿轮(12),所述抱合架(7)、外环(9)以及内环(10)的内侧面均开设有粗糙纹。
6.如权利要求5所述的一种多瓣式挖树机,其特征在于:所述环架(13)的外侧设置有开口,所述环架(13)内侧设置有开合气缸。
7.如权利要求6所述的一种多瓣式挖树机,其特征在于:所述下铲驱动(14)和挖铲(15)各有四个,所述挖铲(15)活动连接在环架(13)外侧。
技术总结
本技术提出了一种多瓣式挖树机。包括基座;其特征在于,所述基座上转动连接有大臂,所述大臂两侧设置有大臂驱动,所述大臂末端转动连接有小臂,所述小臂顶部设置有小臂驱动,所述小臂的上部设置有抱合气缸,所述抱合气缸的活塞杆末端固定连接有抱合架,所述抱合架顶面设置有抱合电机,所述抱合架内设置有外环和内环,所述外环和内环的顶面及底面均设置有齿条,所述小臂底部固定连接有环架,所述环架上部设置有下铲驱动,所述下铲驱动的输出端固定连接有挖铲。本技术的优点在于:在抱合电机的带动下,外环和内环分别从抱合架的两侧伸出,将树干抱拢,对树干形成侧面约束,避免树木翻倒,使挖树工作更加安全稳定。
技术研发人员:郭浩
受保护的技术使用者:湖北广通工程装备有限公司
技术研发日:20230208
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!