一种草莓采摘机器人
本技术涉及农用机械设备,特别涉及一种草莓采摘机器人。
背景技术:
1、农用机械设备是指在作物种植业和畜牧业生产过程中,以及农、畜产品初加工和处理过程中所使用的各种机械。由于草莓生长高度低,大面积的草莓种植地使得劳作者在摘草莓的过程中劳动强度非常大,而且,草莓的果实汁多,外表柔软,易碰伤,人工采摘草莓时要尽量减少外表损伤,因此,对采摘时间和采摘方法有着严格的要求。
2、考虑到草莓易破损的特点,传统的果实夹持机械手不能用于草莓采摘设备中,而现有的草莓采摘机器人存在着田垄内通过性差,缺少缓震结构使草莓易挤压破损等缺点。
技术实现思路
1、为了解决现有技术存在的问题,本实用新型提供了一种草莓采摘机器人,其结构简单,能够在草莓大棚中松软的土地上灵活移动,减小了果实坠落高度,降低了果实挤压、破损的程度。
2、为了实现上述目的,本实用新型的技术方案是:
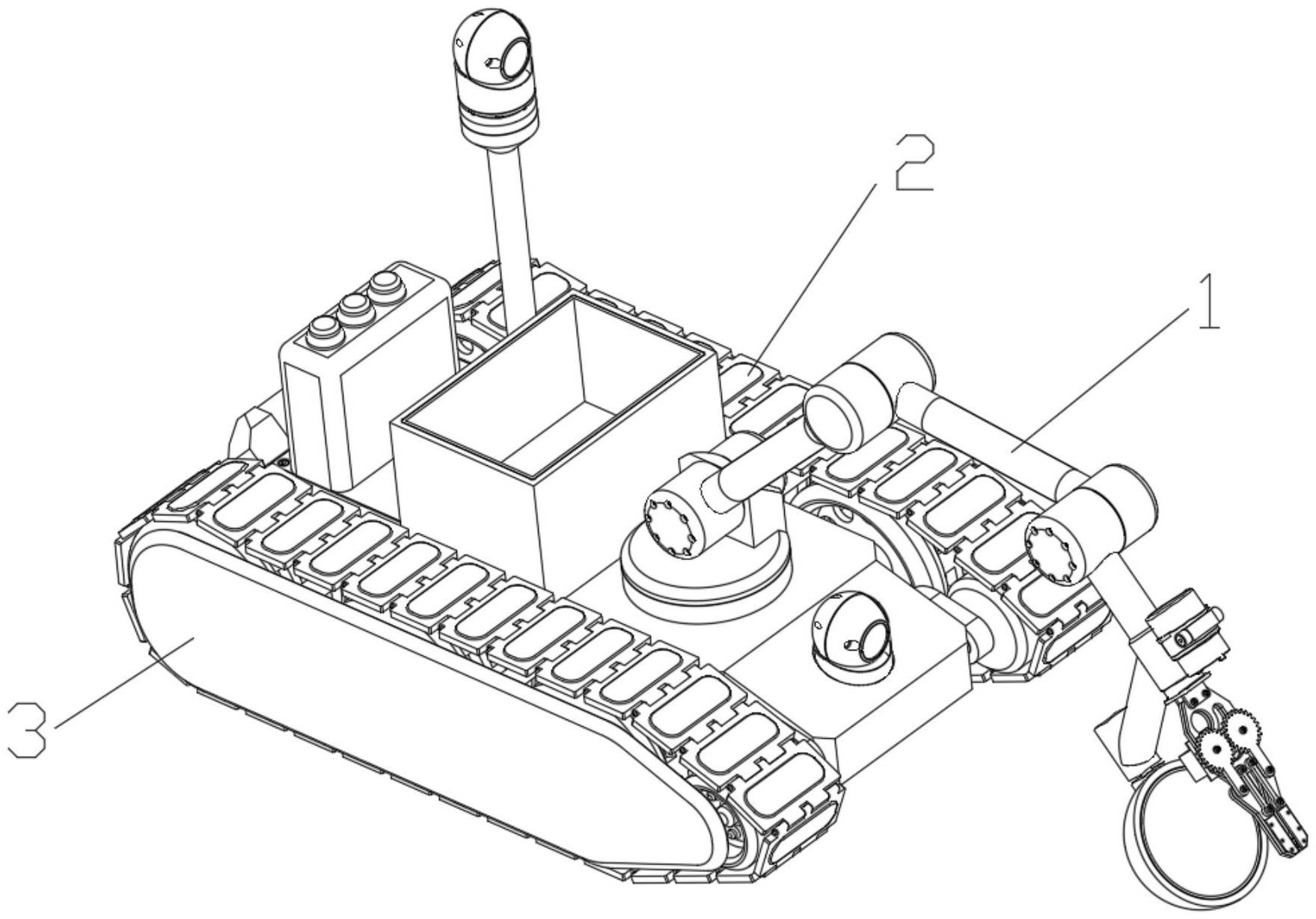
3、一种草莓采摘机器人,包括行走系统和采摘系统;
4、所述行走系统的顶部设置有储果箱,用于放置草莓;
5、所述采摘系统包括设置于行走系统的采摘机械臂以及设置于采摘机械臂前端的采摘剪,所述采摘剪的下方通过采摘剪连接头设置有接果碗,用于承接采摘剪剪下的草莓。
6、进一步的,所述草莓采摘机器人还包括设置于行走系统两侧的履带挡板。
7、进一步的,所述行走系统包括底盘以及设置于底盘的主动轮和张紧轮,所述主动轮和张紧轮的外部设置有履带。
8、进一步的,所述主动轮与设置于底盘的主动轮电机相连,所述张紧轮通过张紧轮连接杆转动设置于底盘。
9、进一步的,所述履带为由若干个履带片通过履带片连接销连接而成的环形结构,所述履带的内部设置有凸起,所述凸起与设置于主动轮和张紧轮外部的凹槽啮合。
10、进一步的,所述采摘机械臂包括依次转动连接的机械臂连接座、机械臂后臂、机械臂中臂和机械臂前臂,所述机械臂连接座转动设置于行走系统,所述机械臂前臂与采摘剪连接头相连。
11、进一步的,所述采摘剪包括与采摘剪连接头连接的剪刀固定板,所述剪刀固定板通过两个推杆分别连接两个切刀;其中一个切刀与剪刀固定板通过齿轮杆相连,另一个切刀与设置于剪刀固定板的舵机通过齿轮杆相连;两个齿轮杆的齿轮端啮合。
12、进一步的,所述采摘剪连接头与接果碗电机相连,所述接果碗电机的转动端与所述接果碗相连。
13、进一步的,所述接果碗设置有接果碗内垫。
14、进一步的,所述储果箱内部设置有储果箱内垫。
15、本实用新型的有益效果:
16、1)本实用新型通过履带式的行走系统能够实现机器人的移动,使机器人在草莓大棚中松软的土地上有更好的通过性;
17、2)本实用新型的行走系统采用电力驱动,减少了污染物的排放;
18、3)本实用新型由一支前端带有采摘剪和接果碗的采摘机械臂完成采摘工作,采摘剪用于剪断草莓的茎,使草莓采摘时果实不被接触,接果碗用于接住采摘下的草莓,碗内设置有减振的泡沫垫,大大减小了果实坠落高度,降低了果实挤压、破损的程度;
19、4)本实用新型的接果碗接果后,采摘机械臂转向,接果碗侧翻,将果实放入储果箱中,便于草莓的放置。
20、本实用新型的其他特征和优点将在下面的具体实施方式中部分予以详细说明。
技术特征:
1.一种草莓采摘机器人,其特征在于,包括行走系统和采摘系统;
2.根据权利要求1所述的草莓采摘机器人,其特征在于,还包括设置于行走系统两侧的履带挡板。
3.根据权利要求1或2所述的草莓采摘机器人,其特征在于,所述行走系统包括底盘以及设置于底盘的主动轮和张紧轮,所述主动轮和张紧轮的外部设置有履带。
4.根据权利要求3所述的草莓采摘机器人,其特征在于,所述主动轮与设置于底盘的主动轮电机相连,所述张紧轮通过张紧轮连接杆转动设置于底盘。
5.根据权利要求3所述的草莓采摘机器人,其特征在于,所述履带为由若干个履带片通过履带片连接销连接而成的环形结构,所述履带的内部设置有凸起,所述凸起与设置于主动轮和张紧轮外部的凹槽啮合。
6.根据权利要求1或2所述的草莓采摘机器人,其特征在于,所述采摘机械臂包括依次转动连接的机械臂连接座、机械臂后臂、机械臂中臂和机械臂前臂,所述机械臂连接座转动设置于行走系统,所述机械臂前臂与采摘剪连接头相连。
7.根据权利要求1或2所述的草莓采摘机器人,其特征在于,所述采摘剪包括与采摘剪连接头连接的剪刀固定板,所述剪刀固定板通过两个推杆分别连接两个切刀;其中一个切刀与剪刀固定板通过齿轮杆相连,另一个切刀与设置于剪刀固定板的舵机通过齿轮杆相连;两个齿轮杆的齿轮端啮合。
8.根据权利要求1或2所述的草莓采摘机器人,其特征在于,所述采摘剪连接头与接果碗电机相连,所述接果碗电机的转动端与所述接果碗相连。
9.根据权利要求1或2所述的草莓采摘机器人,其特征在于,所述接果碗设置有接果碗内垫。
10.根据权利要求1或2所述的草莓采摘机器人,其特征在于,所述储果箱内部设置有储果箱内垫。
技术总结
一种草莓采摘机器人,属于农用机械设备技术领域。所述草莓采摘机器人,包括行走系统和采摘系统,行走系统的顶部设置有储果箱,用于放置草莓,采摘系统包括设置于行走系统的采摘机械臂以及设置于采摘机械臂前端的采摘剪,采摘剪的下方通过采摘剪连接头设置有接果碗,用于承接采摘剪剪下的草莓。所述草莓采摘机器人结构简单,能够在草莓大棚中松软的土地上灵活移动,减小了果实坠落高度,降低了果实挤压、破损的程度。
技术研发人员:蔡子硕,吴燕燕,高建崴,高雅,孙佳鑫,魏宏
受保护的技术使用者:沈阳航空航天大学
技术研发日:20230310
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!