一种用于异体授粉的柔性抓手的制作方法
本申请涉及玉米育种,尤其是涉及一种用于异体授粉的柔性抓手。
背景技术:
1、玉米是单性花,异体杂交时需要在前期准备阶段进行套袋隔离,并且为了保证授粉效果,需要对雄蕊进行去除或者使用隔离纸袋进行包裹,同时对雌蕊也需要使用隔离纸袋进行包裹隔离,因为昆虫和风会带来不确定来源的花粉,影响来年播种检验杂交是否成功。
2、针对于目前的隔离纸袋在授粉过程中需要人工摘下和再捆扎的问题,申请人有研究使用柔性袋代替隔离纸袋的方式,柔性袋的优势在于可以通过拉展的方式使体体积膨大,容易刺入,然后在配合使用刺入的方式将花粉送入到柔性袋内,使花粉与雌蕊能够充分接触。但是柔性袋的质地柔软,人工授粉时需要单手实现柔性袋的拉展,另一只手实现花粉的注入,但是目前单手拉展柔性袋存在一定困难。
技术实现思路
1、本申请提供一种用于异体授粉的柔性抓手,通过负压吸附与单手控制启停的方式实现对柔性袋的拉展,用以降低人工异体授粉过程中的操作难度。
2、本申请的上述目的是通过以下技术方案得以实现的:
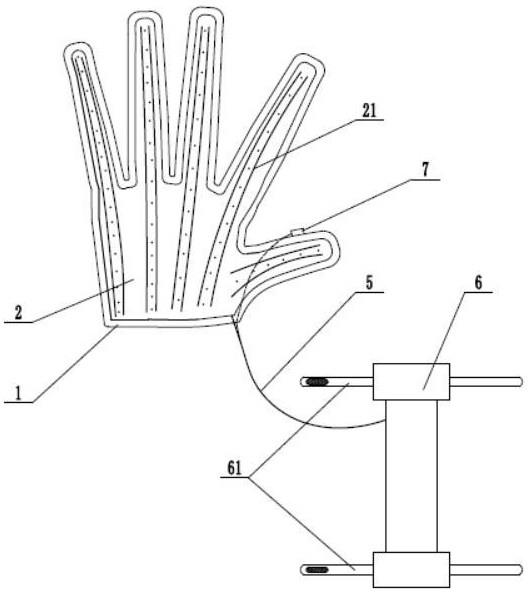
3、本申请提供了一种用于异体授粉的柔性抓手,包括:
4、柔性手套;
5、柔性孔膜,设在柔性手套上,柔性手套与柔性孔膜之间存在空腔;
6、填充颗粒,设在柔性孔膜和/或柔性手套上且位于空腔内;
7、气管,第一端与柔性孔膜连接,第二端与气泵连接;以及
8、感知传感器,设在柔性手套上并与控制芯片的信号输入端电连接;
9、其中,气泵的控制端与控制芯片的信号输出端电连接。
10、在本申请的一种可能的实现方式中,气泵上设有固定环。
11、在本申请的一种可能的实现方式中,柔性孔膜的外侧面上间隔设有定位条。
12、在本申请的一种可能的实现方式中,定位条沿柔性孔膜与隔离纸袋的相对移动方向设置。
13、在本申请的一种可能的实现方式中,感知传感器为速度传感器。
14、在本申请的一种可能的实现方式中,感知传感器为压力传感器。
15、在本申请的一种可能的实现方式中,柔性手套的一个手指部上设有一个突刺。
技术特征:
1.一种用于异体授粉的柔性抓手,其特征在于,包括:
2.根据权利要求1所述的用于异体授粉的柔性抓手,其特征在于,气泵(6)上设有固定环(61)。
3.根据权利要求1所述的用于异体授粉的柔性抓手,其特征在于,柔性孔膜(2)的外侧面上间隔设有定位条(21)。
4.根据权利要求3所述的用于异体授粉的柔性抓手,其特征在于,定位条(21)沿柔性孔膜(2)与隔离纸袋的相对移动方向设置。
5.根据权利要求1至4中任意一项所述的用于异体授粉的柔性抓手,其特征在于,感知传感器(7)为速度传感器。
6.根据权利要求1至4中任意一项所述的用于异体授粉的柔性抓手,其特征在于,感知传感器(7)为压力传感器。
7.根据权利要求1所述的用于异体授粉的柔性抓手,其特征在于,柔性手套(1)的一个手指部上设有一个突刺(11)。
技术总结
本申请涉及一种用于异体授粉的柔性抓手,包括柔性手套、设在柔性手套上的柔性孔膜,柔性手套与柔性孔膜之间存在空腔、设在柔性孔膜和/或柔性手套上且位于空腔内的填充颗粒、第一端与柔性孔膜连接,第二端与气泵连接的气管以及设在柔性手套上并与控制芯片的信号输入端电连接的感知传感器,气泵的控制端与控制芯片的信号输出端电连接。本申请公开的用于异体授粉的柔性抓手,通过负压吸附与单手控制启停的方式实现对柔性袋的拉展,用以降低人工异体授粉过程中的操作难度。
技术研发人员:曹继权,祖光,韩丽丽,王颖,赵丹丹
受保护的技术使用者:河北天和种业有限公司
技术研发日:20230522
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!