一种仿生采摘磁感机械抓手
本技术涉及自动化收获机械,具体为一种仿生采摘磁感机械抓手。
背景技术:
1、机器人的仿生采摘磁感机械抓手采摘是在农业生产的过程中一个重要的环节。在机器人研究领域上,作为机器人的末端执行装置—机械手一直备受关注。在复杂运行环境中机器人现有的仿人型机械手存在制约自身发展的问题,现有的仿生采摘磁感机械抓手主体结构多为刚性的金属材料,刚性过大、自重过重,无法抓取易碎物品等这些难点痛点,难以满足“柔性伸展”和“多参数集成感知”的要求,不利于机械手的智能化发展。为此,本实用新型提出了一种仿生采摘磁感机械抓手以解决上述问题。
技术实现思路
1、针对现有技术的不足,本实用新型提供了一种仿生采摘磁感机械抓手,解决了现有机械抓手主体结构多为刚性的金属材料,刚性过大、自重过重,无法抓取易碎物品,难以满足“柔性伸展”和“多参数集成感知”的要求,不利于机械手智能化发展的问题。
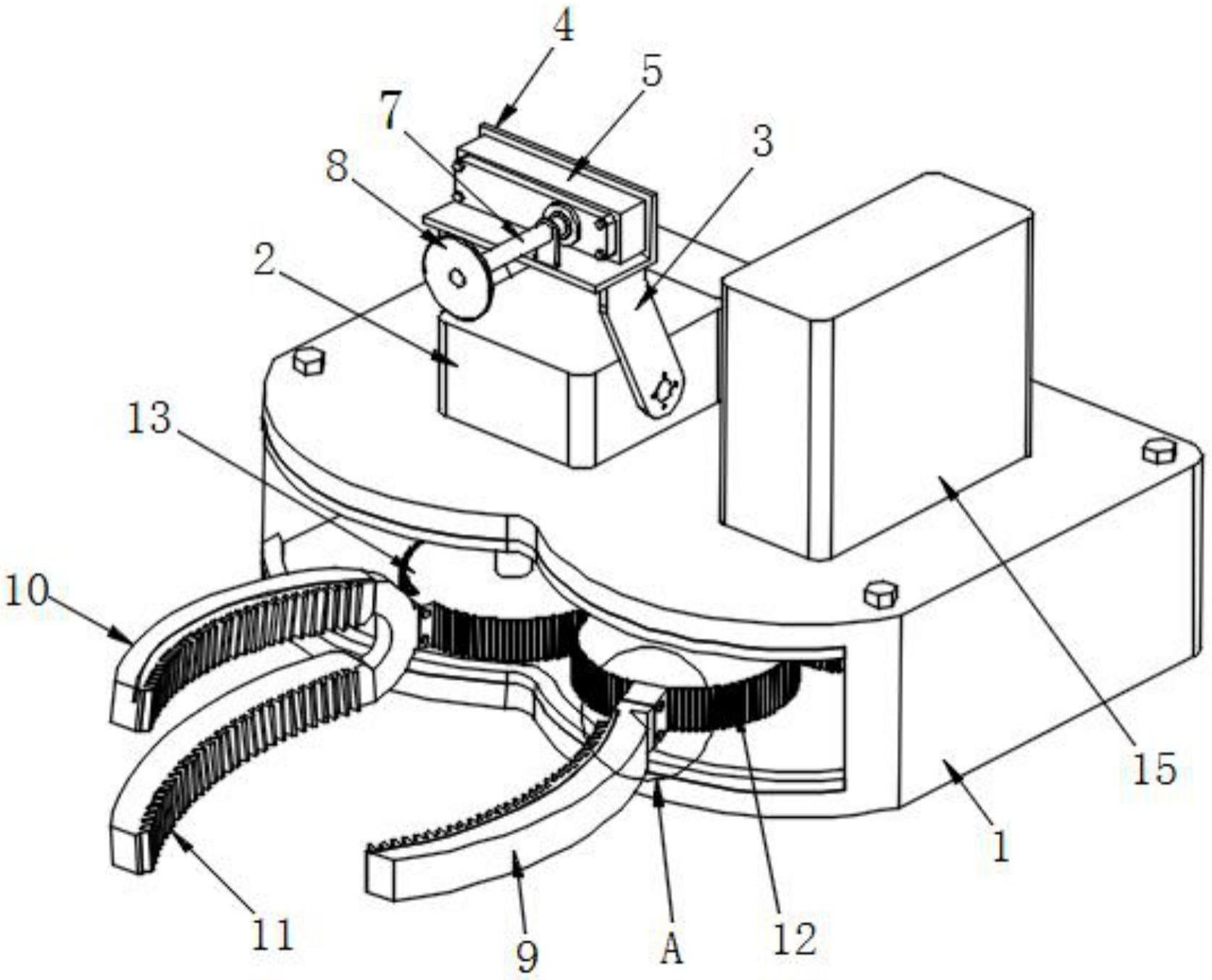
2、为实现以上目的,本实用新型通过以下技术方案予以实现:一种仿生采摘磁感机械抓手,包括承载箱和开设在承载箱正面的避让通槽,所述承载箱顶部设置有用于切断果实果柄的切割机构,位于避让通槽的一侧设置有用于固定果实位置的果实定位机构,所述承载箱腔体内部设置有用于驱动定位机构进行夹持动作的动力机构。
3、切割机构包括第一数字舵机、旋转支架、金属板、第二数字舵机、谐波齿轮、传动轴和圆形刀片,所述第一数字舵机固定设置在承载箱的顶部,所述旋转支架转动设置在第一数字舵机外壁两侧,其中一个所述旋转支架和第一数字舵机的输出轴固定连接,所述金属板固定连接在两个旋转支架的顶端,所述第二数字舵机固定设置在金属板顶部,所述谐波齿轮固定设置在金属板的内部,且谐波齿轮和第二数字舵机的输出轴相连接,所述传动轴的一端和圆形刀片固定连接,且传动轴的另一端和谐波齿轮相连接。
4、果实定位机构包括宽指、u形手指和防护垫,所述宽指和u形手指相对设置,所述防护垫分别固定设置在宽指和u形手指相对侧壁上。
5、动力机构包括第一齿轮、第二齿轮、驱动齿轮、第三舵机和安装套,所述第一齿轮和第二齿轮相互啮合连接,且第一齿轮和第二齿轮分别转动设置在承载箱腔体内部左右两侧,所述驱动齿轮转动设置在承载箱内部一侧,且驱动齿轮和第一齿轮啮合连接,所述第三舵机固定设置在承载箱的顶部,且第三舵机输出轴转动贯穿承载箱并和驱动齿轮相连接,所述安装套分别固定设置在第一齿轮和第二齿轮的外壁一侧。
6、进一步的,所述宽指通过安装套、螺栓与第一齿轮可拆卸连接,所述u形手指通过安装套、螺栓与第二齿轮可拆卸连接。
7、进一步的,所述防护垫为橡胶材质制成,其表面均匀设置有若干橡胶齿牙。
8、进一步的,所述宽指和u形手指的相对侧壁上均固定设置有单点薄膜式压力传感器,用来测量和反馈夹取果实的夹持力。
9、进一步的,所述第一数字舵机、第二数字舵机和第三舵机的外壁上均套设有舵机外壳,用于保护正常工作。
10、进一步的,所述圆形刀片为一种锯齿形圆形金属刀片。
11、有益效果
12、本实用新型提供了一种仿生采摘磁感机械抓手。与现有技术相比具备以下有益效果:
13、1、一种仿生采摘磁感机械抓手,通过宽指和u形手指均仿人指设计具有为一定弧度的光滑面并且内侧接触面上附着有柔性材料装有单点薄膜式压力传感器,可以有效的反馈和测量夹取果实的夹持力,第一齿轮和第二齿轮表面的一侧均设置有安装套,方便柔性手指的安装和拆卸,采用三个数字舵机实现仿生采摘磁感机械抓手的抓取及切割响应速度快、实际转角范围较大,具有较高的抗干扰能力,且灵敏度高,可较好的实现果实的抓取和果柄的切割。
14、2、一种仿生采摘磁感机械抓手,通过采用谐波齿轮,可以降低工作噪声且承载力强,仿生采摘磁感机械抓手优化后的宽指和u形手指内侧垫有柔性材料,且安装了压力传感器能有效的实现对不同成熟度大、小果实进行稳定、无损的抓取,防止被抓爆。
技术特征:
1.一种仿生采摘磁感机械抓手,包括承载箱和开设在承载箱正面的避让通槽,其特征在于:所述承载箱顶部设置有用于切断果实果柄的切割机构,位于避让通槽的一侧设置有用于固定果实位置的果实定位机构,所述承载箱腔体内部设置有用于驱动定位机构进行夹持动作的动力机构;
2.根据权利要求1所述的一种仿生采摘磁感机械抓手,其特征在于:所述宽指通过安装套、螺栓与第一齿轮可拆卸连接,所述u形手指通过安装套、螺栓与第二齿轮可拆卸连接。
3.根据权利要求1所述的一种仿生采摘磁感机械抓手,其特征在于:所述防护垫为橡胶材质制成,其表面均匀设置有若干橡胶齿牙。
4.根据权利要求1所述的一种仿生采摘磁感机械抓手,其特征在于:所述宽指和u形手指的相对侧壁上均固定设置有单点薄膜式压力传感器,用来测量和反馈夹取果实的夹持力。
5.根据权利要求1所述的一种仿生采摘磁感机械抓手,其特征在于:所述第一数字舵机、第二数字舵机和第三舵机的外壁上均套设有舵机外壳,用于保护正常工作。
6.根据权利要求1所述的一种仿生采摘磁感机械抓手,其特征在于:所述圆形刀片为一种锯齿形圆形金属刀片。
技术总结
本技术公开了一种仿生采摘磁感机械抓手,涉及自动化收获机械技术领域,该仿生采摘磁感机械抓手,通过宽指和U形手指均仿人指设计具有为一定弧度的光滑面并且内侧接触面上附着有柔性材料装有单点薄膜式压力传感器,可以有效的反馈和测量夹取果实的夹持力,第一齿轮和第二齿轮表面的一侧均设置有安装套,方便柔性手指的安装和拆卸,采用三个数字舵机实现仿生采摘磁感机械抓手的抓取及切割响应速度快、实际转角范围较大,具有较高的抗干扰能力,且灵敏度高。仿生采摘磁感机械抓手优化后的宽指和U形手指内侧垫有柔性材料,且安装了压力传感器能有效的实现对不同成熟度大、小果实进行稳定、无损的抓取,防止被抓爆。
技术研发人员:黄诗敏,赵子月,马俊熙,江林睿,杨善茵,蔡钰莹,李欣欣,蔡晓娜,吴佳楠
受保护的技术使用者:电子科技大学中山学院
技术研发日:20230525
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!