割草机器人的制作方法
本公开涉及机器人,尤其涉及一种割草机器人。
背景技术:
1、自行走机器人能够自动识别工作区域,并在工作区域内工作;以自行走智能割草机为例,智能割草机通过视觉识别草与非草的边界,根据识别结果沿草与非草的边界移动,或在不越出边界的前提下在工作区域内随机行走执行割草任务。
2、现有割草机器人包括:机体,罩设在机体上的装饰盖,设置于机体下方的行动轮以及对行动轮进行清洁的草刷;装饰盖包覆行动轮;其中,草刷安装过程中,首先在装饰盖朝向驱动轮的内壁处进行加工处理凹陷形成定位槽,之后将草刷设置于定位槽,再通过压板将草刷固定在定位槽;最后通过螺钉等紧固件将压板与装饰盖进行固定。
3、通常情况下,草刷为损耗件,需要定期的进行更换,上述草刷安装步骤复杂,更换时要重复拆除压板;且由于草刷固定在装饰盖中,更换草刷时还需要拆装装饰盖;如此,现有的割草机器人不利于草刷的更换。
技术实现思路
1、有鉴于此,本公开的目的在于提出一种割草机器人,可以提高草刷的更换效率。
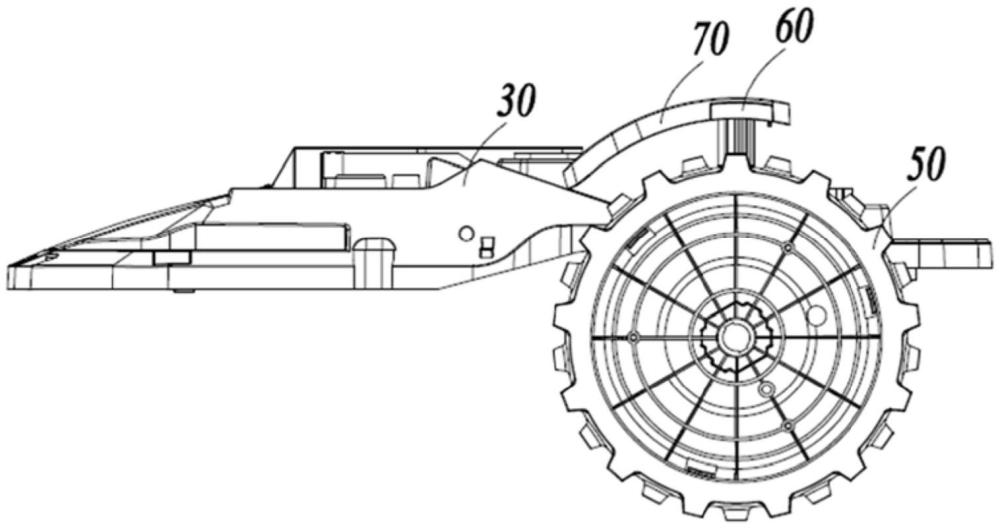
2、为了实现上述公开目的,本公开提供一种割草机器人,包括:机体,设置于机体上的壳体和行动轮;所述行动轮包括未被所述壳体罩设的裸露部;
3、挡板,所述挡板至少部分覆盖所述裸露部;
4、以及设置于所述挡板的轮刷,所述轮刷用于在所述割草机器人移动过程中,对行动轮进行清洁。
5、作为本公开实施方式的进一步改进,所述轮刷相对所述挡板可拆卸。
6、作为本公开实施方式的进一步改进,所述挡板和所述壳体一体成型。
7、作为本公开实施方式的进一步改进,所述挡板相对所述壳体可拆卸。
8、作为本公开实施方式的进一步改进,所述挡板和所述轮刷其中之一设置导轨,其中另一设置与所述导轨配合的滑槽。
9、作为本公开实施方式的进一步改进,所述挡板和所述轮刷之间设置锁紧单元。
10、作为本公开实施方式的进一步改进,所述轮刷与所述挡板一体成型,所述挡板相对所述壳体可拆卸。
11、作为本公开实施方式的进一步改进,所述行动轮全部曝露于所述壳体外。
12、作为本公开实施方式的进一步改进,所述挡板在平行于割草机器人所在平面上的投影和所述行动轮在平行于割草机器人所在平面上的投影有重叠;
13、或者,所述挡板在第一平面上的投影和所述行动轮在所述第一平面上的投影有重叠,所述第一平面表示垂直于割草机器人行进方向的平面。
14、作为本公开实施方式的进一步改进,所述挡板具有朝向所述行动轮的第一面,所述轮刷设置于所述第一面;
15、所述轮刷、所述挡板以及所述行动轮分别在平行于割草机器人所在平面上的投影有重叠;
16、或者,所述轮刷、所述挡板以及所述行动轮分别在所述第一平面上的投影有重叠。
17、本公开提供的割草机器人,通过在未被壳体罩设的裸露部设置轮刷,可以对轮刷进行快速更换,提升草刷更换效率。
技术特征:
1.一种割草机器人,其特征在于,
2.根据权利要求1所述的割草机器人,其特征在于,所述轮刷相对所述挡板可拆卸。
3.根据权利要求2所述的割草机器人,其特征在于,所述挡板和所述壳体一体成型。
4.根据权利要求2所述的割草机器人,其特征在于,所述挡板相对所述壳体可拆卸。
5.根据权利要求2-4任一项所述的割草机器人,其特征在于,所述挡板和所述轮刷其中之一设置导轨,其中另一设置与所述导轨配合的滑槽。
6.根据权利要求5所述的割草机器人,其特征在于,所述挡板和所述轮刷之间设置锁紧单元。
7.根据权利要求1所述的割草机器人,其特征在于,所述轮刷与所述挡板一体成型,所述挡板相对所述壳体可拆卸。
8.根据权利要求1所述的割草机器人,其特征在于,所述行动轮全部曝露于所述壳体外。
9.根据权利要求1或8所述的割草机器人,其特征在于,所述挡板在平行于割草机器人所在平面上的投影和所述行动轮在平行于割草机器人所在平面上的投影有重叠;
10.根据权利要求9所述的割草机器人,其特征在于,所述挡板具有朝向所述行动轮的第一面,所述轮刷设置于所述第一面;
技术总结
本公开提供一种割草机器人,包括:机体,设置于机体上的壳体和行动轮;所述行动轮包括未被所述壳体罩设的裸露部;挡板,所述挡板至少部分覆盖所述裸露部;以及设置于所述挡板的轮刷,所述轮刷用于在所述割草机器人移动过程中,对行动轮进行清洁;本公开提供的割草机器人,通过在未被壳体罩设的裸露部设置轮刷,可以对轮刷进行快速更换,提升草刷更换效率。
技术研发人员:高世林,连洪奎,杜江
受保护的技术使用者:苏州宝时得电动工具有限公司
技术研发日:20230530
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!