一种智能灌溉机器人的制作方法
本技术属于灌溉机器人相关,具体涉及一种智能灌溉机器人。
背景技术:
1、智能灌溉机器人是一种能够智能、自动地进行植物灌溉的机器人,它通过先进的感知技术和人工智能算法,根据植物的需求和环境条件,精确地进行灌溉,提高植物的生长质量和产量,减少人工灌溉的工作量和水资源的浪费。
2、但是现有的智能灌溉机器人灌溉高度不能进行调节,导致其喷水灌溉高度不能随着待灌溉植蔬的高度进行改变,不符合长势较快,高度较高的植蔬。
技术实现思路
1、本实用新型的目的在于提供一种智能灌溉机器人,以解决上述背景技术中提出的现有的智能灌溉机器人灌溉高度不能进行调节,导致其喷水灌溉高度不能随着待灌溉植蔬的高度进行改变,不符合长势较快,高度较高的植蔬问题。
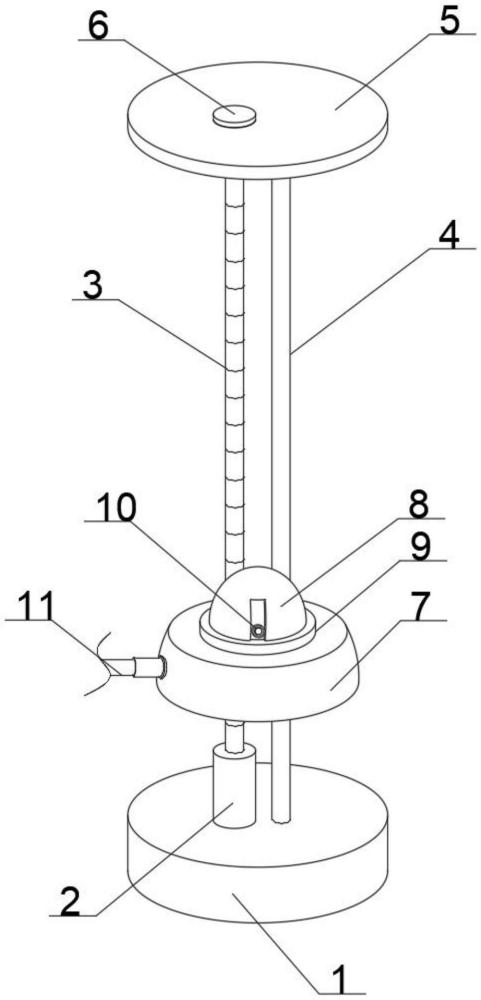
2、为实现上述目的,本实用新型提供如下技术方案:一种智能灌溉机器人,包括机器人主体以及设置在机器人主体上侧中间外部位置处的转动器;
3、所述转动器的前侧内部位置处设置有上下调节槽,所述上下调节槽的内侧位置处设置有喷头,所述机器人主体的左下侧外部位置处设置有连接水管,所述机器人主体通过连接外部电源进行供电;
4、所述机器人主体的后侧位置处设置有固定板,所述固定板的左后侧内部位置处设置有螺纹孔,所述螺纹孔的右侧位置处设置有移动孔,所述机器人主体的下侧位置处设置有固定基座,所述固定基座的中间左侧位置处设置有主轴,所述主轴的上侧中间位置处设置有螺纹杆,所述主轴的右侧位置处设置有移动杆,所述移动杆的上侧末端位置处设置有顶盖,所述螺纹杆和顶盖的连接位置处连接有卡盖,所述固定基座通过连接外部电源进行供电。
5、优选的,所述螺纹杆通过螺纹连接方式和螺纹孔进行连接,所述移动杆贯穿移动孔。
6、优选的,所述固定板通过一体化连接方式和机器人主体进行连接,所述移动杆分别通过一体化连接方式和顶盖以及固定基座进行连接。
7、优选的,所述固定基座的左侧内部位置处设置有电机,且电机末端和所述主轴进行固定连接。
8、优选的,所述主轴通过夹持连接方式和螺纹杆进行连接,所述螺纹杆通过套嵌连接方式和卡盖进行连接,所述卡盖通过套嵌连接方式和顶盖进行连接。
9、优选的,所述移动杆能在主轴的驱动下,在所述卡盖内进行转动,所述机器人主体能通过固定板上的螺纹孔以及移动孔在螺纹杆以及移动杆上进行上下移动。
10、与现有技术相比,本实用新型提供了一种智能灌溉机器人,具备以下有益效果:
11、在该智能灌溉机器人中,能通过固定基座、主轴、螺纹杆、移动杆、顶盖、卡盖、固定板、移动孔以及螺纹孔的设置,该新型能通过根据不同待灌溉植物的高度,利用固定基座内电机带动主轴进行转动,从而带动移动杆在卡盖内进行转动,利用螺纹杆外侧螺纹和机器人主体后侧固定板左方螺纹孔内螺纹的咬合,推动机器人主体在螺纹杆上进行移动,控制机器人主体在移动杆以及螺纹杆上自动升高,从而符合不同高度植物完成灌溉。
技术特征:
1.一种智能灌溉机器人,包括机器人主体(7)以及设置在机器人主体(7)上侧中间外部位置处的转动器(8);
2.根据权利要求1所述的一种智能灌溉机器人,其特征在于:所述螺纹杆(3)通过螺纹连接方式和螺纹孔(13)进行连接,所述移动杆(4)贯穿移动孔(14)。
3.根据权利要求2所述的一种智能灌溉机器人,其特征在于:所述固定板(12)通过一体化连接方式和机器人主体(7)进行连接,所述移动杆(4)分别通过一体化连接方式和顶盖(5)以及固定基座(1)进行连接。
4.根据权利要求3所述的一种智能灌溉机器人,其特征在于:所述固定基座(1)的左侧内部位置处设置有电机,且电机末端和所述主轴(2)进行固定连接。
5.根据权利要求4所述的一种智能灌溉机器人,其特征在于:所述主轴(2)通过夹持连接方式和螺纹杆(3)进行连接,所述螺纹杆(3)通过套嵌连接方式和卡盖(6)进行连接,所述卡盖(6)通过套嵌连接方式和顶盖(5)进行连接。
6.根据权利要求5所述的一种智能灌溉机器人,其特征在于:所述移动杆(4)能在主轴(2)的驱动下,在所述卡盖(6)内进行转动,所述机器人主体(7)能通过固定板(12)上的螺纹孔(13)以及移动孔(14)在螺纹杆(3)以及移动杆(4)上进行上下移动。
技术总结
本技术公开了一种智能灌溉机器人,包括机器人主体以及设置在机器人主体上侧中间外部位置处的转动器,所述转动器的前侧内部位置处设置有上下调节槽,所述上下调节槽的内侧位置处设置有喷头,在该智能灌溉机器人中,能通过固定基座、主轴、螺纹杆、移动杆、顶盖、卡盖、固定板、移动孔以及螺纹孔的设置,该新型能通过根据不同待灌溉植物的高度,利用固定基座内电机带动主轴进行转动,从而带动移动杆在卡盖内进行转动,利用螺纹杆外侧螺纹和机器人主体后侧固定板左方螺纹孔内螺纹的咬合,推动机器人主体在螺纹杆上进行移动,控制机器人主体在移动杆以及螺纹杆上自动升高,从而符合不同高度植物完成灌溉。
技术研发人员:王永英,张会党,冯庆丰,阎海涛
受保护的技术使用者:希尔泰智能科技(河南)有限公司
技术研发日:20230810
技术公布日:2024/3/4
- 还没有人留言评论。精彩留言会获得点赞!