一种欠驱动球面果实采摘机械手
本发明涉及采摘机器人,尤其涉及一种欠驱动球面果实采摘机械手。
背景技术:
1、在我国农业领域,由于缺乏有效可行的果实采摘机械设备,导致果实采摘效率低下。因此,发明一种可以代替人手的果实采摘机械手,不仅可以大大减少人力资源消耗而且可有效提高果实采摘效率,并保护果实、果树不受损伤。
2、我国农产品外表皮比较脆弱,形状大都各异,在采摘过程中容易通过人为或者机械造成损伤。因此,果实采摘手应具备:很高的自适应能力,尽可能不与旁边的其他农产品及果实树木接触造成损伤;能够精准的识别不同种类的果实,且能够对于同类的果实形状进行无伤夹取;包裹能力强,避免在夹持过程中发生掉落,会对果实造成伤害。
3、传统的全驱动机械手缺乏对外界冲击的柔性,并且机械手在采摘过程中需要与果实直接接触,很容易对果实造成不定的损伤,而采用新型欠驱动果实采摘机械手可以增大与果实接触面的柔和度,同时可根据不同果实的大小来调整夹持力度,进从达到减少对果实的损伤的目的。
技术实现思路
1、为了解决上述技术问题,本发明提供了一种结构简单、能够减小对果实损伤的欠驱动球面果实采摘机械手。
2、本发明提供了一种欠驱动球面果实采摘机械手,包括:
3、夹持机构,所述夹持机构包括三组手指部,每组所述手指部包括指尖和多个指关节,与果实接触的多个所述指关节连接为球面结构,所述指尖内开设有刀槽,所述刀槽中设置有刀片,所述刀片用于切割果柄;
4、驱动机构,所述驱动机构包括直线径向驱动组件和转动驱动组件,所述直线径向驱动组件包括驱动杆和传动装置,所述驱动杆一端与三组所述手指部连接,另一端与所述传动装置连接,所述传动装置驱动所述驱动杆沿其轴向方向往复运动,以带动所述手指部沿所述驱动杆的轴向方向伸展或收缩,实现对果实的轴向和径向包络,所述转动驱动组件包括底座及啮合的主动齿轮和被动齿轮,所述主动齿轮和所述被动齿轮的一侧均与所述传动装置连接,所述被动齿轮的另一侧通过所述底座与三组所述手指部连接,驱动所述主动齿轮转动,带动所述被动齿轮旋转,从而带动所述底座和三组所述手指部转动,实现对果实的径向包络。
5、可选的,每组所述手指部包括依次连接的第一指关节、第二指关节、第三指关节、第四指关节、指尖、第五指关节、第六指关节和第七指关节,所述指尖、所述第五指关节和所述第六指关节连接为球面结构,所述第三指关节与所述第五指关节之间设置有第一弹性件。
6、可选的,所述底座为适于所述驱动杆穿设的圆环状,所述第一指关节与所述底座连接,所述第七指关节与所述驱动杆连接。
7、可选的,所述指尖内设置有控制装置,所述第六指关节和所述第七指关节朝向果实的一侧均设置有压力传感器,所述压力传感器将所述手指部与果实接触时的压力的大小传输至所述控制装置中,当所述压力达到预设值时,所述控制装置控制所述刀片弹出。
8、可选的,所述指尖处还设置有视觉传感器,所述视觉传感器将果柄位置信号传输至所述控制装置中,当所述控制装置不再接收果柄位置信号时,所述控制装置控制所述刀片收回。
9、可选的,所述指尖内部设置有第二弹性件,所述第二弹性件的一端与所述指尖内壁连接,另一端与所述刀片连接。
10、可选的,所述指尖、所述第五指关节和所述第六指关节与果实接触的一侧设置有柔性层。
11、可选的,所述转动驱动组件还包括驱动组件,所述驱动组件包括电机和舵盘,所述主动齿轮与所述舵盘连接,所述电机设置于所述舵盘和所述传动装置之间,所述电机驱动所述舵盘转动,带动所述主动齿轮转动,以带动所述被动齿轮转动。
12、可选的,所述传动装置包括驱动件、机架、第一滑杆和第二滑杆,所述机架包括垂直连接的顶板和侧板,所述侧板上开设有第一通孔,所述驱动件的输出轴穿设所述通孔与所述第一滑杆的一端转动连接,所述第二滑杆的一端与所述第一滑杆的另一端转动连接,所述第二滑杆的另一端通过套管与所述驱动杆连接。
13、可选的,所述顶板上开设有第二通孔,所述驱动杆穿设出所述第二通孔与所述手指部连接,所述转动驱动组件设置于所述顶板上;
14、所述套管与所述驱动杆同轴设置。
15、本发明实施例提供的技术方案与现有技术相比具有如下优点:
16、本发明实施例提供了一种欠驱动球面果实采摘机械手,包括夹持机构和驱动机构,夹持机构包括三组手指部,三组手指部用于对果实进行包络,与果实接触的多个指关节连接为球面结构,使指关节的重心集于一点,提高了对果实的包裹度和承载能力,降低了对果实表皮的损伤,通过利用多个指关节伸展或收缩以对不同形状的果实进行包络,提高了机械手的适用性,同时在指尖1内部开设刀槽,刀槽中设置刀片,可利用刀片对果实的果柄进行切割,从而实现果实的摘取,实现了对果实的径向包络;驱动机构包括直线驱动组件和转动驱动组件,直线径向驱动组件包括驱动杆和传动装置,驱动杆的顶端与三组手指部连接,驱动杆的底端与传动装置连接,传动装置能够驱动驱动杆沿驱动杆的轴向方向做往复运动,从而带动手指部沿驱动杆的轴向方向伸展或收缩,实现对果实的轴向和径向包络,转动驱动组件包括底座及啮合的主动齿轮和被动齿轮,三组手指部与底座的上表面连接,被动齿轮设置于底座的下表面,且与主动齿轮啮合,主动齿轮和被动齿轮的底部均与传动装置连接,驱动主动齿轮转动,从而能够带动被动齿轮转动,被动齿轮带动底座转动,从而实现三组手指部进行转动,实现了对果实径向抓持位置的调整,当果实果柄难以切割时,可通过利用轴向驱动组件带动手指部进行旋转从而扯断果柄,此机械手结构简单,自适应能力强。
技术特征:
1.一种欠驱动球面果实采摘机械手,其特征在于,包括:
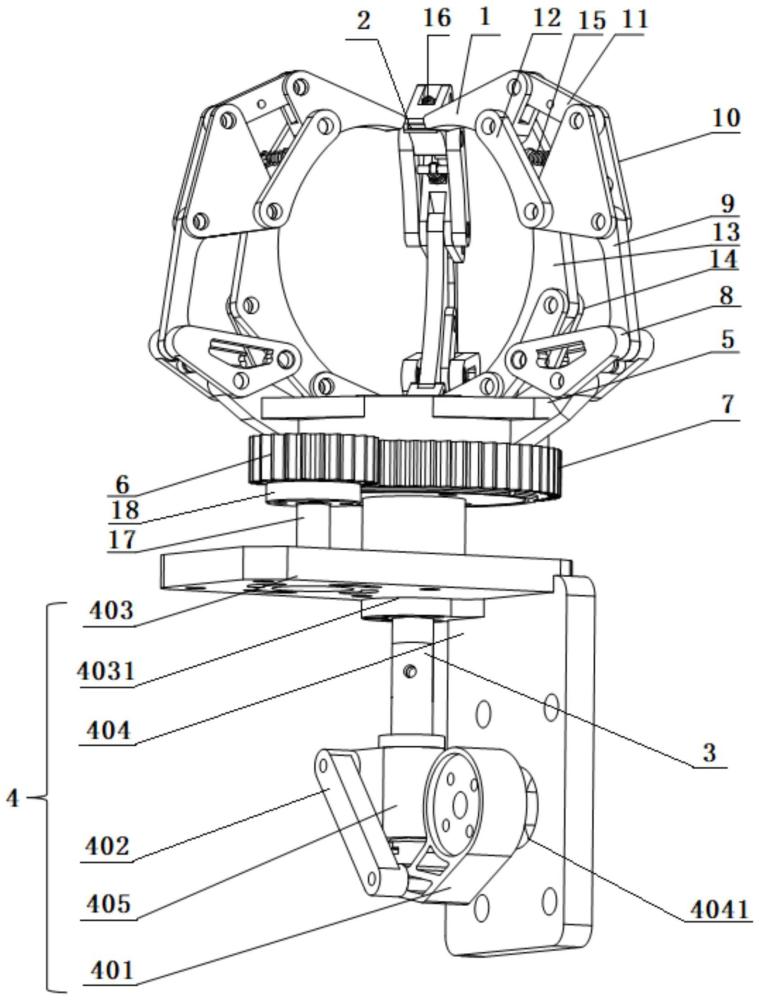
2.根据权利要求1所述的欠驱动球面果实采摘机械手,其特征在于,每组所述手指部包括依次连接的第一指关节(8)、第二指关节(9)、第三指关节(10)、第四指关节(11)、指尖(1)、第五指关节(12)、第六指关节(13)和第七指关节(14),所述指尖(1)、所述第五指关节(12)和所述第六指关节(13)连接为球面结构,所述第三指关节(10)与所述第五指关节(12)之间设置有第一弹性件(15)。
3.根据权利要求2所述的欠驱动球面果实采摘机械手,其特征在于,所述底座(5)为适于所述驱动杆(3)穿设的圆环状,所述第一指关节(8)与所述底座(5)连接,所述第七指关节(14)与所述驱动杆(3)连接。
4.根据权利要求2所述的欠驱动球面果实采摘机械手,其特征在于,所述指尖(1)内设置有控制装置,所述第六指关节(13)和所述第七指关节(14)朝向果实的一侧均设置有压力传感器,所述压力传感器将所述手指部与果实接触时的压力的大小传输至所述控制装置中,当所述压力达到预设值时,所述控制装置控制所述刀片弹出。
5.根据权利要求4所述的欠驱动球面果实采摘机械手,其特征在于,所述指尖(1)处还设置有视觉传感器,所述视觉传感器将果柄位置信号传输至所述控制装置中,当所述控制装置不再接收果柄位置信号时,所述控制装置控制所述刀片收回。
6.根据权利要求4和5任一项所述的欠驱动球面果实采摘机械手,其特征在于,所述指尖(1)内部设置有第二弹性件(16),所述第二弹性件(16)的一端与所述指尖(1)内壁连接,另一端与所述刀片连接。
7.根据权利要求2所述的欠驱动球面果实采摘机械手,其特征在于,所述指尖(1)、所述第五指关节(12)和所述第六指关节(13)与果实接触的一侧设置有柔性层。
8.根据权利要求1所述的欠驱动球面果实采摘机械手,其特征在于,所述还包括驱动组件,所述驱动组件包括电机(17)和舵盘(18),所述主动齿轮(6)与所述舵盘(18)连接,所述电机(17)设置于所述舵盘(18)和所述传动装置(4)之间,所述电机(17)驱动所述舵盘(18)转动,带动所述主动齿轮(6)转动,以带动所述被动齿轮(7)转动。
9.根据权利要求1所述的欠驱动球面果实采摘机械手,其特征在于,所述传动装置(4)包括驱动件、机架、第一滑杆(401)和第二滑杆(402),所述机架包括垂直连接的顶板(403)和侧板(404),所述侧板(404)上开设有第一通孔(4041),所述驱动件的输出轴穿设出所述第一通孔(4041)与所述第一滑杆(401)的一端转动连接,所述第二滑杆(402)的一端与所述第一滑杆(401)的另一端转动连接,所述第二滑杆(402)的另一端通过套管(405)与所述驱动杆(3)连接。
10.根据权利要求9所述的欠驱动球面果实采摘机械手,其特征在于,所述顶板(403)上开设有第二通孔(4031),所述驱动杆(3)穿设出所述第二通孔(4031)与所述手指部连接,所述转动驱动组件设置于所述顶板(403)上;
技术总结
本发明涉及采摘机器人技术领域,尤其涉及一种欠驱动球面果实采摘机械手。其包括夹持机构和驱动机构,夹持机构包括三组手指部,每组手指部包括指尖和多个指关节,与果实接触的多个指关节连接为球面结构,指尖内设置有切割果柄的刀片,驱动机构包括径向直线驱动组件和轴向转向驱动组件,传动装置驱动驱动杆沿其轴向做往复运动,驱动杆与手指部连接,实现手指部的伸展或收缩,实现对果实的轴向和径向包络,被动齿轮与底座连接,三组手指部与底座连接,驱动主动齿轮转动,带动与其啮合的被动齿轮转动,使得底座转动,带动手指部转动,实现了对果实径向抓持位置的调整,此机械手以包络方式实现果蔬采摘,减小了对果实的损伤。
技术研发人员:屈淑维,李瑞琴,王皓楠,冯盛权,姚立腾,任奕达
受保护的技术使用者:中北大学
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!