一种串番茄采摘末端执行器及其采摘方法
本发明属于现代农业装备,涉及果蔬自动化采摘技术,尤其涉及一种串番茄采摘末端执行器及其采摘方法。
背景技术:
1、果蔬自动化采摘技术在农业领域的应用日益普及,主要目标是提高生产效率、降低人工成本以及减少劳动力短缺。串番茄作为重要的蔬菜类产品,种植广泛,但传统的采摘依赖人工操作,面临诸多问题,如劳动力成本高、生产效率低、工作强度大、易损伤果实等。因此,迫切需要研发一种高效、精准、稳定的番茄自动化采摘技术,以提升果实的质量和产量。
2、目前采摘机器人虽然针对多种不同的水果进行了相应的研发、设计,但是采摘成功率和采摘速度仍受到果实生长姿态的影响。仍需要在保证采摘成功率、果实完整度的前提下设计出结构更简单,尺寸更小的末端执行器,来应对复杂生长环境下的果实,提高采摘机器人工作灵活性和适用范围。同时降低成本,来提高采摘机器人的普及程度。针对不同果实存在多种末端执行器,不具有普适性,使得有多种果蔬的种植园使用采摘机器人的成本高、维修难。需要针对相似采摘方案的果蔬设计一种末端执行器。
技术实现思路
1、针对上述技术问题,本发明的目的是提出一种串番茄采摘末端执行器及其串番茄采摘方法,实现剪夹一体化,在目标果实及周边果实,且果实之间存在遮挡堆叠情况下,不易损伤目标果实,实现自主串收作业,采收后果串有序码放,提高采摘效率和对不同尺寸、形状串番茄的适应性。
2、为了实现上述目的,本发明提供了如下技术方案:
3、一种串番茄采摘末端执行器,其特征在于,通过支架(21)安装于番茄采摘机器人的手腕法兰上,通过支架(21)上方的深度相机(23)和控制系统获取采摘对象的空间位置;
4、所述深度相机(23)通过螺钉固接在支架(21)上,用于采集采摘场景的图像并发送至所述控制系统,由所述控制系统计算得到所述采摘对象的空间位置并控制机械臂到达指定位置,再驱动所述串番茄末端执行器执行相关采摘动作;
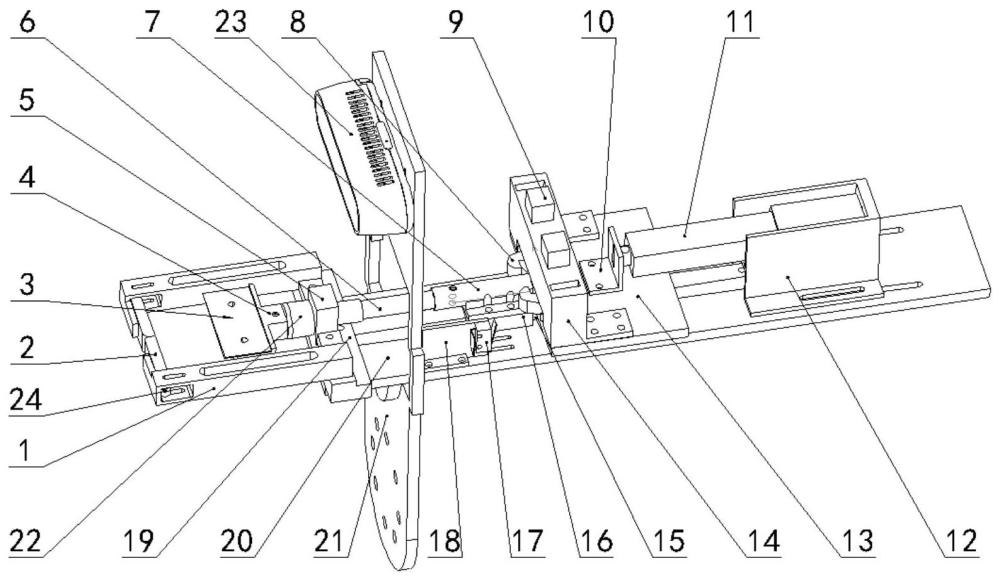
5、所述串番茄采摘末端执行器包括所述栏杆(1)、开关门(2)、刀片(3)、推头(4)、管座(5)、推杆(6)、推杆电机(11)、推杆电机座(12)、滑块(16)、推杆限位开关(17)、推杆限位开关底座(18)、滑轨(19)、底板(20)、支架(21)、压缩弹簧(22)和夹爪台;
6、所述管座(5)通过螺钉固定安装在底板(20)的上方,所述栏杆(1)通过螺钉固定安装在管座(5)上方,所述开关门(2)通过螺钉和圆柱扭簧(24)固定安装在栏杆(1)的末端进行轴向限位;所述刀片(3)通过螺钉安装在推头(4)上方,所述推杆(6)穿过管座(5)通过螺钉固定安装在推头(4),所述压缩弹簧(22)穿过推杆(6),限制推头(4)和管座(5)距离;所述推杆(6)的另一端穿进管滑台(7)通过螺钉固定安装,管滑台(7)通过螺钉固定安装在所述滑块(16)上方,所述滑块(16)沿着滑轨(19)来回滑动,所述滑轨(19)通过螺钉固定在所述底板(20)上;所述推杆电机座(12)通过螺钉安装固定在底板(20)上,所述推杆电机(11)通过固定安装在推杆电机座(12)里面,而所述推杆电机(11)的另一端则通过螺钉固定安装在所述l连接(10)的一侧;所述推杆限位开关支座(18)通过螺钉安装在底板(20)上,所述推杆限位开关(17)通过螺钉固定安装在所述推杆限位开关支座(18)的一侧;
7、所述夹爪台包括夹爪(8)、直流减速电机(9)、l连接(10)、夹爪台底座(13)、电机支架(14)、电机限位开关(15),所述夹爪台底座(13)通过螺钉安装固定在底板(20)上,所述电机支架(14)通过螺钉固定安装在所述夹爪台底座(13)上;所述l连接(10)通过螺钉安装在所述夹爪台底座(13)上,另一端通过螺丝固定安装在所述推杆电机(11);所述两个直流减速电机(9)垂直安装固定在所述电机支架(14)里面,所述夹爪(8)通过所述直流减速电机(9)固定安装;所述的两个电机限位开关(15)通过螺钉固定安装在所述夹爪台底座(13)上。
8、可选的:所述栏杆(1)前端有凸起,对所述开关门(2)进行限位。
9、可选的:所述栏杆(1)安装在所述管座(5)上是中心对称分布,所述的两个栏杆装配方案相同。
10、可选的:所述的刀片(3)相对于所述推头(4)伸出,保证所述开关门(2)可以和所述推头(4)接触。
11、可选的:所述压缩弹簧(22)在所述的开关门(2)和管座(4)之间进行轴向限位。
12、可选的:所述左右两个夹爪(8)可以夹住所述的管滑台(7),进行轴向限位。
13、可选的:所述的推杆电机(11)固定在所述推杆电机座(12)上,所述推杆电机(11)的伸出端对所述l连接(10)进行限位,而所述l连接(10)可以对所述夹爪台进行轴向限位。
14、可选的:所述推杆限位开关支座(18)和所述推杆限位开关(17)一起对所述电机支架(14)进行轴向限位。
15、一种串番茄采摘方法,应用于权利要求1-8任一项所述的串番茄采摘末端执行器,所述番茄采摘方法包括如下步骤:
16、s1支架(21)上方的深度相机(23)检测到可采摘的樱桃番茄果串,在目标樱桃番茄串前停止运动,所述控制系统通过图像识别和定位获取采摘目标串番茄的目标位置信息,并驱动机械臂将所述串番茄末端执行器运动到所述目标的前方,使所述目标串番茄果梗顶开开关门(2)后进入采摘区域,开关门(2)在圆柱扭簧(24)的作用下关闭,将所述串番茄果梗留在开关门(2)内;
17、s2所述直流减速电机(9)工作,所述夹爪(8)跟随所述直流减速电机(9)的电机轴的逆时针旋转转动打开放开所述管滑台(7),所述两夹爪(8)外侧均安装一个所述限位开关(15),所述夹爪(8)到达外侧极限位置后仍继续旋转而卡死。所述推杆(6)在所述压缩弹簧(22)的驱动下向前运动,通过安装在所述推杆(6)前端的推头(4)上的所述刀片(3)在所述压缩弹簧(22)的推力作用下切断所述果梗,安装所述刀片(3)的所述刀片(4)下端与所述开关门(2)构成的加持装置对果梗进行夹持;
18、s3所述推杆电机(11)向前工作,所述夹爪台(13)触碰所述推杆限位开关(17)后,所述推杆电机(11)停止伸长,所述直流减速电机(9)工作控制所述夹爪(8)顺时针转动夹住所述推杆(6)末端的所述管滑台(7),然后所述推杆电机(11)向后运动,所述推头(4)也跟随向后运动,所述开关门(2)和所述推头(4)放开果梗,果串落入集果装置中,进行集果作业;
19、s4等待所述深度相机(23)发现下一串所述课采摘果串,再次进行采摘作业。
20、本发明的有益效果在于:
21、1、本发明采用剪夹一体式,与传统的剪切式相比,要求的安装精度和识别精度不需要那么高,结构紧凑,便于控制,对环境适用性强。
22、2、剪切过程中,传统末端执行器切割机构易损伤目标果实及周边果实,且果实之间存在遮挡堆叠情况,不利于采摘。本发明在剪切时将果梗保持在一个安全的范围内,不会让刀片伤及周边果串。
23、3、本发明在剪断果梗的同时,由夹持机构实现对果梗的夹持,并且设计有阻力槽,提高夹持结构的摩擦力,进一步确保能进行稳定夹持。
24、4、本发明采用模块化思想,每个单独的模块装配互不干扰,与传统的末端执行器不同,每个模块都便于拆卸、维修和更换。
- 还没有人留言评论。精彩留言会获得点赞!