一种激振式树冠林果采收机构及其采收方法
本发明属于林果采收机械,具体涉及一种激振式树冠林果采收机构及其采收方法。
背景技术:
1、林果振动采收技术是指利用机械设备的振动特性,将其应用于林果的采收过程中,通过振动使果实摇晃,当果实产生的惯性力大于果实与果柄的连接力时,实现果实脱落从而进行收集。现有的林果振动采收机构中大多采用主干激振的形式实现林果的采收,易对果树主干造成损伤,且激振效果差,进而使得采收效率低。现有的林果振动采收机构中也有直接作用于果树枝干来实现林果的采收,但是激振轨迹主要为圆或椭圆,激振效果较差,进而使得采收效率较低,且激振参数单一,适用范围有限。
技术实现思路
1、本发明的目的是为了克服现有技术不足,提出一种激振式树冠林果采收机构及其采收方法。
2、为实现上述目的,本发明采用以下技术方案:
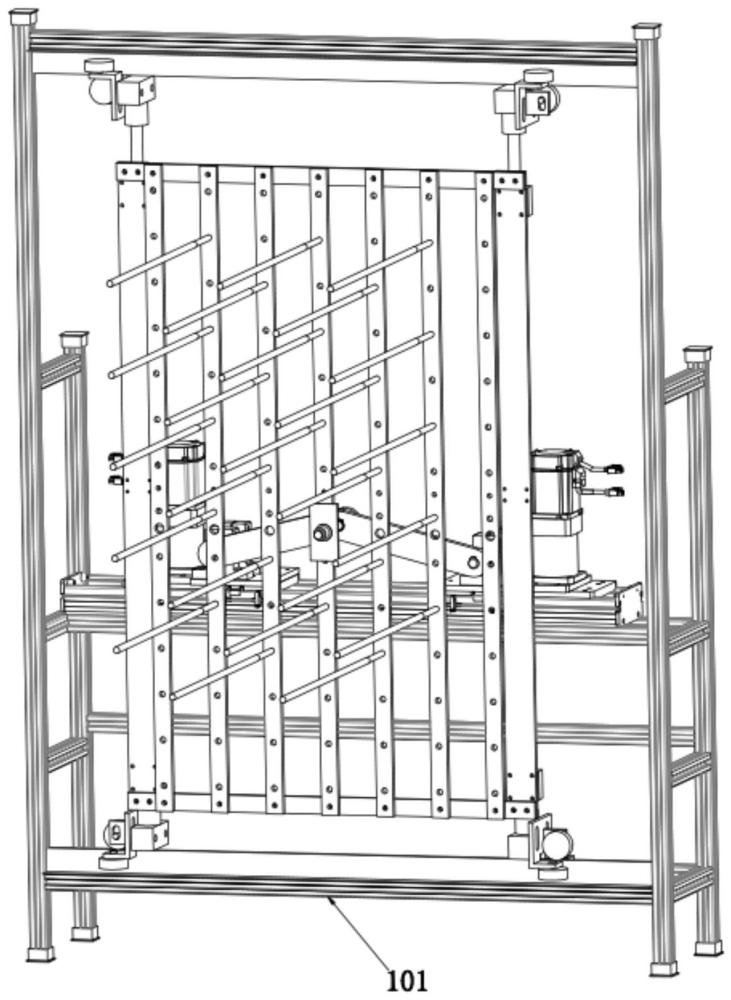
3、一种激振式树冠林果采收机构,包括固定框架、激振框架和激振机构。
4、所述激振机构包括滑台一、转轴一、连杆一、连接轴、连杆二、转轴二、滑台二、底座、齿条、齿轮一和齿轮二;所述水平设置的底座固定于固定框架上;水平平行的滑台一和滑台二均与底座构成水平方向的滑动副;所述齿轮一和齿轮二均置于底座上开设的凹槽内,并与滑台一和滑台二的下表面分别构成转动副,且由两个伺服电机通过两个减速机分别驱动;齿条固定于凹槽内,且齿轮一和齿轮二均与齿条啮合;所述水平平行的转轴一和转轴二与滑台一和滑台二分别构成转动副;连杆一和连杆二的一端与转轴一和转轴二的同一端分别铰接,另一端均与连接轴的一端铰接,连接轴的另一端与激振框架的中部固定,且连接轴平行于转轴一。
5、所述激振框架上设有间距布置的多个激振杆组,激振杆组由自上而下间距布置的多个激振杆组成,激振杆水平固定于激振框架上,且各激振杆组中每相邻两个激振杆组的各激振杆交错布置;所述激振框架的四个角均固定有滑块,每个滑块与一个滑动轴构成竖直方向的滑动副,每个滑动轴与一个固定块固定,各固定块均与固定框架构成水平方向的滑动副。
6、优选地,所述伺服电机的壳体固定于相应的减速机的壳体上,减速机的壳体与滑台一或滑台二固定,伺服电机的输出轴与减速机的输入轴固定,减速机的输出轴穿过滑台一或滑台二上开设的通孔,与通孔构成转动副,并与齿轮一或齿轮二固定。
7、优选地,所述底座上固定有直线导轨,滑台一和滑台二均与直线导轨构成滑动副。
8、优选地,所述滑台一和滑台二上分别固定有固定板一和固定板二,且固定板一和固定板二水平平行设置,转轴一和转轴二与固定板一和固定板二分别构成转动副。
9、优选地,所述连杆一两端分别开设有轴孔一和轴承孔,连杆二两端均开设有轴孔二,转轴一穿过轴孔一,与轴孔一构成转动副,转轴二穿过一个轴孔二,与一个轴孔二构成转动副,连接轴穿过另一个轴孔二,与另一个轴孔二构成转动副,并通过深沟球轴承支承在轴承孔上;其中,轴孔一和两个轴孔二内均设有间距布置的两个弹性挡圈,连杆一、连杆二和连接轴通过相应的两个弹性挡圈轴向定位。
10、优选地,所述底座的两端均固定有限位挡板,每个限位挡板的内侧固定有间距布置的若干个阻尼圈。
11、优选地,所述固定块通过螺栓与连接件固定,连接件与激振框架构成水平方向的滑动副,且连接件上铰接有若干个导轮,各导轮均与固定框架构成滚动摩擦副。
12、优选地,所述激振框架上固定有固定件,且激振框架和固定件上均开设有圆孔,固定件上远离激振框架的一侧固定有滑动导套,且两个圆孔和滑动导套的中心孔同轴设置,连接轴远离连杆一的一端穿过两个圆孔和中心孔,并与中心孔固定。
13、本发明一种激振式树冠林果采收机构的采收方法,具体如下:
14、初始状态下,滑台一和滑台二位于底座两端的极限位置处;将固定框架安装在移动小车上,移动小车通过固定框架带动激振框架和激振机构移动,使激振框架上各激振杆插入目标果树的树冠内,并在果树树冠下方放置收集框;然后设置两个伺服电机输出轴的转角规律,控制器控制两个伺服电机工作,两个伺服电机通过两个减速机分别驱动齿轮一和齿轮二转动,齿轮一和齿轮二均与齿条啮合,进而分别带动滑台一和滑台二平移,滑台一和滑台二通过连杆一和连杆二带动连接轴以旋轮线轨迹运动,进而带动激振框架和各激振杆以旋轮线轨迹运动,各激振杆对果树树冠进行激振,果实在各激振杆的作用下受迫振动产生惯性力,当惯性力大于果实与枝条的结合力时,果实脱落,并掉入收集框内,从而完成果实的采收;其中,激振框架运动过程中,激振框架带动各滑块沿相应的滑动轴同步升降,并通过各滑块和各滑动轴带动各固定块同步平移。
15、优选地,所述连接轴以旋轮线轨迹运动时,两个伺服电机输出轴的转角大小计算过程如下:
16、设转轴一、转轴二和连接轴的中心轴线在同一竖直面上的投影点分别为点a1、点a2和点p,以点a1和点a2所在的直线为x轴,以初始状态下点a1和点a2的中点为原点o建立直角坐标系xoy,设线段a1p的长度为l1,线段a2p的长度为l2;利用运动学逆解方法,在旋轮线轨迹上按照预设时间段沿轨迹方向划分多个轨迹点,记为p1,p2,…,pk,…,pn,其中,p1点为旋轮线轨迹的起点和终点,各轨迹点的坐标满足下列方程:
17、
18、式中,和分别为点a1和点a2处于k时刻时的x轴坐标,xk和yk为点p处于k时刻时的x轴坐标和y轴坐标;
19、将各轨迹点的x轴坐标和y轴坐标代入上列方程中,从而求得各轨迹点对应的点a1和点a2的x轴坐标,然后根据齿轮一和齿轮二的齿轮导程、两个减速机的减速比与两个伺服电机输出轴转角的关系方程式,计算得到旋轮线轨迹上各轨迹点对应的两个伺服电机输出轴的转角大小,其中,齿轮一和齿轮二的齿轮导程、两个减速机的减速比与两个伺服电机输出轴转角的关系方程式为
20、
21、式中,和分别为滑台一上的伺服电机和滑台二上的伺服电机处于k时刻时的转角,和给定,s1和s2分别为齿轮一和齿轮二的齿轮导程,即齿轮一和齿轮二旋转一圈时分别带动滑台一和滑台二平移的直线距离,i1和i2分别为是滑台一上的减速机和滑台二上的减速机的减速比。
22、本发明具有以下有益效果:
23、1、本发明可以实现果实的采收工作,且采收效率高;具体地,本发明通过两个伺服电机分别驱动齿轮一和齿轮二带动滑台一和滑台二平移,滑台一和滑台二通过连杆一和连杆二带动连接轴、激振框架和各激振杆运动,使各激振杆对果树树冠进行激振,进而使得果实在各激振杆的作用下受迫振动产生惯性力,当惯性力大于果实与枝条的结合力时,果实脱落并掉入收集框内,从而实现了果实的采收工作;进一步,与现有的主干激振形式相比,本发明中产生的激振直接作用于枝干和果实上,进而使得激振效果提升,提高了采收效率,且本发明各激振杆的激振轨迹为旋轮线激振轨迹,与现有的圆形激振轨迹或椭圆激振轨迹相比,本发明中所使用的旋轮线激振轨迹可有效提升激振效果,进而可以实现采收效率的进一步提高。
24、2、本发明通过分别改变两个伺服电机输出轴的转速可以实现旋轮线轨迹形状的改变,通过同时改变两个伺服电机输出轴的转速可以实现对激振频率的改变,通过改变连杆一和连杆二两端铰接点的距离,可以实现对激振振幅的的改变,对旋轮线轨迹整体大小进行缩放,进而本发明可以实现对不同种类果树以及不同物理特性和生物力学特性果树的果实采收,适用范围广。
- 还没有人留言评论。精彩留言会获得点赞!