一种烟叶采摘装置的采收高度和角度的自适应调控方法
本发明涉及农用机具,具体涉及一种烟叶采摘装置的采收高度和角度的自适应调控方法。
背景技术:
1、随着现代农业技术的发展,烟草植保和采收基本上已经实现机械化或者部分机械化。根据自动化程度不同,可将烟叶收获机大体分为半自动烟草收获机和全自动烟草收获机两种。
2、半自动烟草收获机核心部分是一个自走式动力平台,采收工人乘坐在合适位置,手工采下叶片。其自动化程度较低,相比于纯人工采收,该机型可节约工人一定的体力,但如果需要提高采收效率,需增加采收工人作业位置。
3、全自动烟草收获机也称为自走式烟草收获机,此种机型的自动化程度高,同半自动化烟草收获机相比,其核心部分在于采摘装置的设计,即使用机械结构代替手工采摘,降低了烟叶采收运输过程中的人为损伤,提高了烟叶采收效率和烘烤质量。
4、自走式烟草收获机之间的差异主要在于采摘装置的不同。采摘装置的差异主要源于适用的烟株品种和机构工作原理的不同。采摘装置是烟草收获机的核心部分,是影响烟草采收效果的关键,亟需研发出适应烟草生长特性的采收装置。采摘装置的差异在采摘刀,采摘刀是采摘装置的核心。目前烟叶采摘过程中,采摘刀具的采收高度和角度通常需要人工调节,存在调节不准确、效率低下等问题。因此,需要一种能够自动调节烟叶采摘刀具的采收高度和角度的方法,以提高采摘效率和准确性。
技术实现思路
1、本发明的目的在于克服上述存在的问题,提供一种烟叶采摘装置的采收高度和角度的自适应调控方法,该自适应调控方法可以自动调节采摘刀具的采收高度和角度,可提高采摘效率和准确性。
2、本发明的目的通过以下技术方案实现:
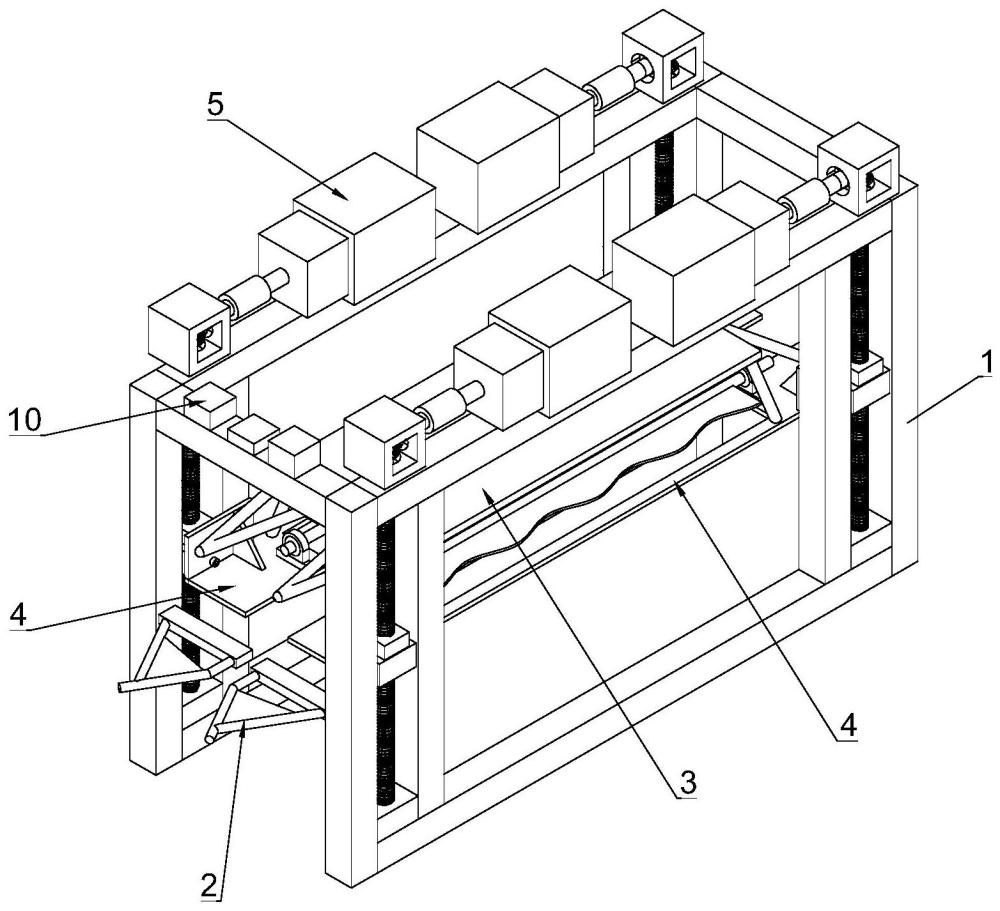
3、一种烟叶采摘装置的采收高度和角度的自适应调控方法,所述烟叶采摘装置包括机架、采摘机构、激光雷达传感器组件以及控制系统;所述采摘机构以及激光雷达传感器组件均设置在机架上;其中,所述采摘机构包括两个相对设置用于采收烟叶的采收刀台以及两个用于驱动采收刀台运动以调节其采收高度和角度的调节模块,所述调节模块与所述采收刀台一一对应设置;所述采收刀台包括刀具基座以及转动设置在所述刀具基座上的采摘刀具;每个所述调节模块包括两个分别设置在所述机架前后两端的动力组件,每个动力组件均包括转动设置在所述机架上的螺旋杆、设置在螺旋杆上且与螺旋杆配合连接的升降平台以及用于驱动所述螺旋杆转动的驱动电机;所述调节模块中的两个升降平台分别与刀具基座的前后两端活动连接;所述激光雷达传感器组件以及驱动电机与控制系统连接;
4、所述自适应调控方法,包括以下步骤:
5、(1)数据采集:激光雷达传感器组件实时采集烟叶的高度数据和当前采收刀台的高度数据;
6、(2)数据处理:将激光雷达传感器组件采集到的数据传输给控制系统进行处理;
7、(3)控制系统计算:控制系统根据烟叶的高度数据和当前采收刀台的高度数据计算出需求的采收高度和角度;
8、(4)采摘刀具调节:控制系统控制四个驱动电机,驱动电机输出动力,带动螺旋杆转动,带动各个升降平台进行上升或者下降,实现刀具基座的高度与角度调节,进而实现采摘刀具的高度与角度调节,直到采摘刀具到达至需求的采收高度和角度;
9、(5)采摘装置移动:控制系统控制采摘装置移动,使采摘装置能够精确地接触到烟叶;
10、(6)采摘操作:采摘刀具按照计算得出的采收高度和角度对烟叶进行采摘操作;
11、(7)反馈调节:控制系统根据采摘过程中的实际情况,对采摘刀具的采收高度和角度进行动态调整;
12、(8)重复操作:重复步骤(2)-(7),实现采摘刀具的自适应调控。
13、本发明的一个优选方案,其中,所述烟叶采摘装置还包括扶禾器以及导向分隔机构;所述扶禾器设置在机架的前端;所述扶禾器用于扶正烟株并引导烟株进入采摘机构中;所述导向分隔机构设置在采摘机构上,用于防止烟株在采摘时发生晃动并用于分隔不需要采摘的烟叶。采摘过程中,烟叶采摘装置移动,扶禾器会扶正烟株并引导烟株进入采摘机构中,采摘时,导向分隔机构可以防止发生晃动并用于分隔需要采摘与不需要采摘的烟叶。
14、本发明的一个优选方案,其中,所述采摘刀具的材质为塑胶材料,该采摘刀具的左右两侧的刀锋边缘为正弦曲线形状。一个采摘刀具的刀锋边缘为凸起时,另一个采摘刀具对应的位置为凹槽,即两个采摘刀具的可以相互啮合,有利于剪切烟叶,这样可以提高采摘效果。
15、优选地,所述导向分隔机构包括两个导向分隔板,所述导向分隔板与所述采收刀台一一对应设置,所述导向分隔板固定安装在所述刀具基座上。上述结构中,两个导向分隔板位于沿着机架行驶方向的对称轴线两侧,两个导向分隔板可以限制烟株的左右晃动,还能将上下空间分成非采摘区域和采摘区域,位于导向分隔板上方的空间为非采摘区域,位于导向分隔板下方的空间为采摘区域,使得在采收目标部分烟叶时不会对其它部分的烟叶产生伤害;导向分隔板和采摘刀具同步升降和转动,采摘高度变化时,依然可以使所需采摘范围的烟叶平稳的经过导向分隔板,最终由采摘刀具进行采摘,保证了采摘的精度。
16、优选地,所述扶禾器包括两个设置在所述机架前端的扶禾板,两个扶禾板之间形成喇叭状的导向槽。两个扶禾板分别位于沿机架行驶方向的对称轴线的两侧,用于保证烟株平滑进入两个采摘刀具的工作空间,避免采摘装置推倒、折断烟株。
17、优选地,所述激光雷达传感器组件包括多个激光雷达传感器,多个激光雷达传感器分别设置在机架前端上中部以及升降平台上。通过设置多个激光雷达传感器,便于精确采集烟株的数据信息,所述激光雷达传感器还用于采集采收刀台两端的高度,该激光雷达传感器与控制系统连接。
18、优选地,所述刀具基座的前后两端设有活动连接槽,所述升降平台上设有螺栓,所述螺栓与所述活动连接槽活动配合连接。通过上述结构,使得刀具基座与升降平台实现活动连接,通过升降平台的上下运动,使得刀具基座的高度和角度调节,最终实现采收刀台的采收高度和角度调节。
19、一种烟叶采摘装置的采收高度和角度的自适应调控方法,包括以下步骤:
20、(1)数据采集:激光雷达传感器组件实时采集烟叶的高度数据和当前采收刀台的高度数据;
21、(2)数据处理:将激光雷达传感器组件采集到的数据传输给控制系统进行处理;
22、(3)控制系统计算:控制系统根据烟叶的高度数据和当前采收刀台的高度数据计算出需求的采收高度和角度;
23、(4)采摘刀具调节:控制系统控制四个驱动电机,驱动电机输出动力,带动螺旋杆转动,带动升降平台进行上升或者下降,实现刀具基座的高度与角度调节,进而实现采摘刀具的高度与角度调节,直到采摘刀具到达至需求的采收高度和角度;
24、(5)采摘装置移动:控制系统控制采摘装置移动,使采摘装置能够精确地接触到烟叶;
25、(6)采摘操作:采摘刀具按照计算得出的采收高度和角度对烟叶进行采摘操作;
26、(7)反馈调节:控制系统根据采摘过程中的实际情况,对采摘刀具的采收高度和角度进行动态调整;
27、(8)重复操作:重复步骤(2)-(7),实现采摘刀具的自适应调控。
28、优选地,所述控制系统包括plc控制器,所述plc控制器控制采摘刀具的高度和角度是通过自适应pid调控策略实现,自适应pid调控策略应用于pid控制器中,所述pid控制器包括比例单元、积分单元以及微分单元;其拉普拉斯数学传递模型公式如下:
29、
30、其中,u(s)为驱动电压信号,e(s)为反馈误差信号,kp、ki、kd为系统的控制参数,其中kp为比例系数,kd为微分系数,ki为积分系数;
31、通过设定积分限幅,限定采收刀台左右端的上下可移动的最大位移;通过设定积分分离,使采摘装置在采摘中途重新设定移动距离时,以上一个控制周期的pid控制器的控制参数进行此次运算;通过激光雷达传感器获取每个控制周期中烟叶的高度数据及采摘刀具两端的高度,计算出该周期的跟踪误差,结合误差增量并依据pid控制器的三个控制参数,实现对控制系统输出信号的调控,从而控制采摘刀具的采收高度和角度。
32、优选地,所述采摘机构还包括变频器,所述plc控制器通过变频器与所述驱动电机连接。通过设置变频器,可以对驱动电机进行调控。
33、优选地,所述plc控制器与所述变频器之间通过can协议进行通讯。
34、本发明与现有技术相比具有以下有益效果:
35、1、本发明中的烟叶采摘装置的采收高度和角度的自适应调控方法,与现有技术中的半自动烟草收获机和全自动烟草收获机相比,现有技术的烟叶收获机自动化程度低,存在调节不准确、效率低下等问题;而本技术的自适应调控方法,根据烟叶的高度,可以实时改变采收刀台前后端的高度以及采收刀台相对于的地面的角度,使采摘机构较精确的采摘每株烟株的杆茎上所需部位的烟叶,同时减少对不需采取部位的烟叶的损害,大大增强了烟叶采摘机构的自动化程度及适用范围。
36、2、本发明中的烟叶采摘装置的采收高度和角度的自适应调控方法,通过对采收刀台的高度和角度的动态调节,可提高采摘效率和准确性。
- 还没有人留言评论。精彩留言会获得点赞!