一种具有无人机采摘单元的莲蓬采摘机器人
本发明涉及莲蓬采摘机器人领域,特别是一种具有无人机采摘单元的莲蓬采摘机器人。
背景技术:
1、莲子是一种营养食品与中医药材。采摘莲蓬获取莲子是莲子生产的首要步骤,但其长期以来只能依靠人工作业。近年来,莲蓬采摘的低效率对莲子产业发展产生了直接影响,发展高效莲蓬机器人采摘技术具有迫切性。
2、对于莲蓬所处的泥地池沼、植被茂密的莲田环境而言,在其中部署常规可移动采摘机器人难度极大。近年来,已出现一些专用于莲蓬的采摘机器人或采摘装置的专利报道。相关技术方案按采摘的操作方式差异可分为基于机械臂的和基于无人机的采摘机器人两种类型。
3、基于机械臂的采摘机器人主要采用龙门式和平衡悬臂式结构,其横梁上设置有串联、坐标式等各类多自由度机械臂,工作时,由机械臂驱动采摘执行器运动到达指定位置执行采摘。其中,采用龙门式结构的采摘机器人采摘精度高,稳定性好,但是存在行走部分体积大,对莲田地基规格和质量要求高的问题,因此,对于当前占绝大多数的非标准莲田而言其实用性受到极大限制。采用平衡悬臂式结构的采摘机器人依托在田间预先布设的轨道或者直接利用田埂行进,行走部分体积小,非常适用于非标准莲田。但是其机械臂部分具有一定重量,在执行采摘过程中机械臂在悬臂上的移动和动作将产生一定惯性力,进而对整机的稳定性、平衡性产生影响,由之带来的晃动将直接影响莲蓬采摘的质量。
4、基于无人机的采摘机器人,其不具有常规采摘机器人的本体部分,直接由无人机搭载采摘执行器到达指定位置执行采摘。其可实现自主可控飞行,且不依赖于高精度的机械臂和稳定的采摘机器人底盘即可作业,轻便灵活,适合于在莲田环境中执行莲蓬采摘任务。但是其自身电池电量有限,存在显著的飞行续航时间短的问题,无法长时间进行采摘作业,给机器人莲蓬采摘作业的持续性造成极大挑战。
技术实现思路
1、为解决上述技术问题,本发明提供一种具有无人机采摘单元的莲蓬采摘机器人,以进一步提高莲蓬机器人采摘的实用性和可实施性。
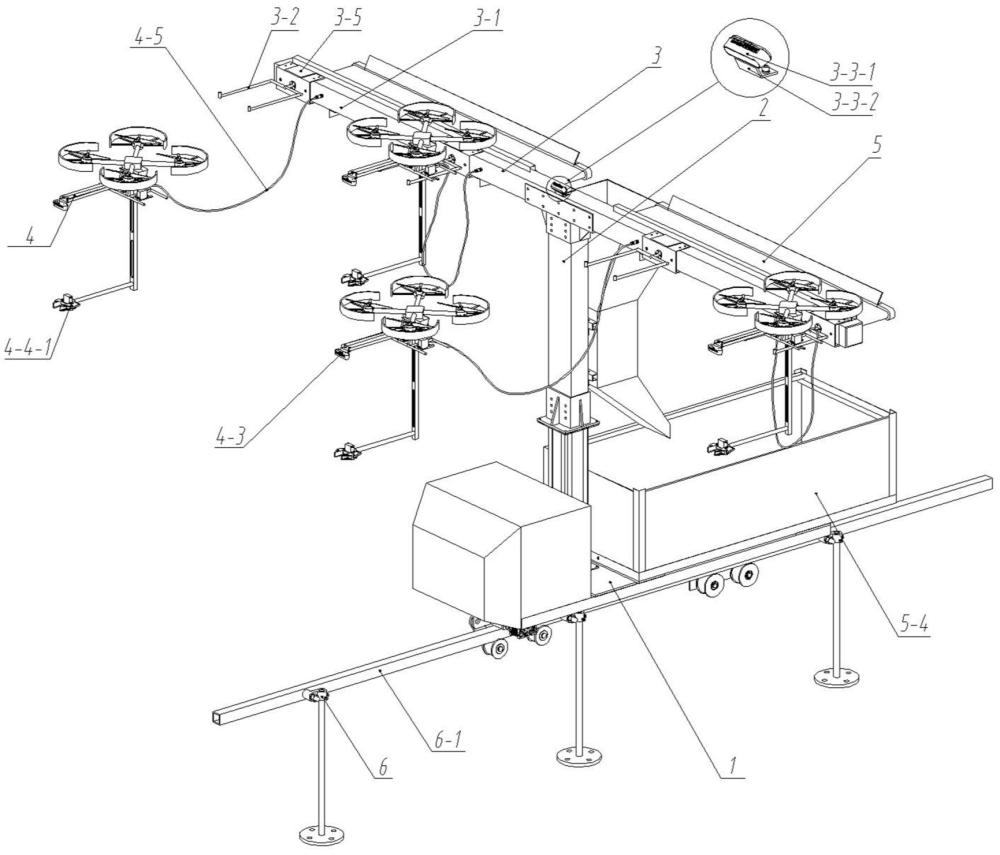
2、本发明采用的技术方案是:一种具有无人机采摘单元的莲蓬采摘机器人,其特征在于:包括移动平台、立柱组件、横梁组件、无人机采摘单元、果实收集组件、行走轨道组件;
3、所述移动平台包括底盘、行走机构、控制箱;所述行走机构安装于底盘下部,包括驱动轮组件和从动轮组件,所述驱动轮组件和从动轮组件与行走轨道组件中的行走轨道活动相连,所述驱动轮组件用以驱动移动平台沿行走轨道移动;所述行走轨道由轨道支撑架支撑、固定在莲田中;所述控制箱包括控制系统、电池、供电电源,所述控制系统包括传感数据输入程序、目标识别与定位程序、运行控制程序,用以实现对莲蓬采摘机器人整机及各部分的动作的控制、无人机飞行过程及自动采摘过程的控制、状态监测,所述电池与供电电源用于向采摘机器人各部分和无人机采摘单元提供电力供应;
4、所述立柱组件安装于移动平台上,包括电动升降立柱和上立柱,所述横梁组件安装于立柱组件上,与上立柱相连,所述电动升降立柱用于带动横梁组件作整体高度升降调整,以适应具有不同莲蓬生长高度的莲田;
5、所述横梁组件包括横梁、无人机停机组件、前向全局观测相机组件、位置姿态传感器,所述无人机停机组件安装于横梁上前侧,包括停机撑杆和端部限位柱;所述前向全局观测相机组件安装于横梁上部,包括全局观测深度相机和相机安装座,用于为所述具有无人机采摘单元的莲蓬采摘机器人提供前向全局立体视野;所述位置姿态传感器用于获取莲蓬采摘机器人整机的位置和姿态数据;
6、所述无人机采摘单元包括无人机本体、无人机停机锁止机构、无人机采摘观测组件、采摘执行器组件、线缆,所述无人机本体具有可控飞行移动功能,底部安装有无人机降落支架,所述无人机降落支架包括支架横杆和支架纵杆;所述无人机停机锁止机构包括锁止舵机和锁止杆,所述锁止舵机安装于支架纵杆侧面,所述锁止杆安装于锁止舵机轴端;
7、所述无人机采摘单元具有工作和停机收容两种状态,当处于停机收容状态时,无人机采摘单元通过支架横杆降落在所述无人机停机组件上的停机撑杆上,所述无人机停机锁止机构中的锁止舵机驱动锁止杆向外转动一定角度到达锁止位置,使得所述停机撑杆在垂直方向处于支架横杆与锁止杆共同限制的区域之间,从而限制无人机采摘单元沿垂直方向的移动;此外,所述端部限位柱用以限制无人机采摘单元滑出停机撑杆,由此共同形成对无人机采摘单元的锁止,防止其掉落;当无人机采摘单元处于工作状态时,锁止杆复位到达解锁位置,所述无人机采摘单元离开停机撑杆;
8、所述无人机采摘观测组件包括深度相机和相机安装杆,所述深度相机安装于相机安装杆一端,所述相机安装杆与无人机本体相连;所述深度相机用于为无人机采摘单元提供三维立体视野,进而基于控制系统中部署的目标识别与定位程序确定目标莲蓬及其采摘点的三维空间位置;
9、所述采摘执行器组件安装于无人机本体底部,包括采摘执行器、前向伸长杆和垂向伸长杆,所述垂向伸长杆与无人机本体相连,所述前向伸长杆与垂向伸长杆下端相连;所述采摘执行器安装于前向伸长杆端部,用于执行莲蓬采摘与转运,具有抓取、夹持及剪切功能;
10、所述线缆一端经过横梁组件、立柱组件与控制箱相连,另一端与无人机本体相连,用于向无人机采摘单元提供电力供应,同时实现无人机采摘单元和控制箱之间的信号传输;
11、所述果实收集组件包括传送带装置、支撑架、垂向果实收集管道、果实收集框,所述传送带装置安装于横梁后侧的支撑架上,所述垂向果实收集管道安装于上立柱后侧,位于传送带装置出口端下方,其下端通向果实收集框;所述果实收集框位于底盘中后部;
12、所述的具有无人机采摘单元的莲蓬采摘机器人工作时,无人机采摘单元在莲田上方飞行,同时探测待采摘莲蓬目标,在获取莲蓬目标的三维空间位置数据后,飞行接近目标并通过采摘执行器执行采摘,随后将所采摘的莲蓬转运带离,放置在所述传送带装置上,莲蓬依次经传送带装置和垂向果实收集管道最终落入果实收集框中。
13、作为本方案的进一步优化,上述的具有无人机采摘单元的莲蓬采摘机器人,沿横梁的长度方向至少布置有1套无人机停机组件;相应地,各套无人机停机组件对应布置有1套无人机采摘单元;所述无人机本体自身包含飞行、定位及定姿所需的飞行控制系统、传感器系统;所述无人机采摘单元建立有工作坐标系;各套无人机停机组件对应的横梁上部还设置有标定板,用于无人机采摘单元的定位、定姿。
14、作为本方案的进一步优化,在上述的具有无人机采摘单元的莲蓬采摘机器人中,所述的传送带装置呈左右对称布置,出口端相对。
15、作为本方案的进一步优化,在上述的具有无人机采摘单元的莲蓬采摘机器人中,所述的控制系统的莲蓬目标识别程序采用深度学习目标检测算法,或者采用深度学习多目标跟踪算法;所述的目标定位程序是基于目标识别程序获取的目标二维图像坐标和深度相机获取的深度数据实现三维空间定位。
16、作为本方案的进一步优化,在上述的具有无人机采摘单元的莲蓬采摘机器人中,所述的采摘执行器采用抓取或夹持莲蓬、剪切荷梗采摘点的工作方式,或者采用抓取或夹持荷梗、剪切荷梗采摘点的工作方式。
17、作为本方案的进一步优化,在上述的具有无人机采摘单元的莲蓬采摘机器人中,所述的位置姿态传感器为全球导航卫星系统gnss模块,其还用于建立莲蓬采摘机器人全局坐标系。
18、作为本方案的进一步优化,在上述的具有无人机采摘单元的莲蓬采摘机器人中,所述的标定板采用apriltag标签。
19、作为本方案的进一步优化,在上述的具有无人机采摘单元的莲蓬采摘机器人中,所述的传送带装置上部两侧安装有侧护板。
20、与现有技术相比,本发明的有益效果是:1、本发明利用无人机具有的可控飞行移动能力执行自动采摘,无需在采摘机器人本体结构上设置采摘机械臂,降低了机器人整机的复杂程度,提高了稳定性,可良好适应莲蓬所处的泥地池沼、植被茂密环境,同时,还设计了平衡悬臂式结构的采摘机器人本体,为无人机工作、停机、采后莲蓬的存放提供依托,显著提高了无人机采摘莲蓬的持续性,减少了无人机的自身负荷;2、本发明通过采摘机器人本体为无人机实时持续供电,解决了无人机采摘的面临的续航时间短的问题,可实现高效、持续的莲蓬采摘。
- 还没有人留言评论。精彩留言会获得点赞!