一种智能鞋底打胶系统的制作方法
1.本发明涉及制鞋设备技术领域,具体为一种智能鞋底打胶系统。
背景技术:
2.现在的鞋底涂胶都是采用人工操作为主,而人工操作具有明显的几个缺点:第一就是工作效率低下;第二就是工作质量,这就导致导致后期进行鞋底与鞋身装配时存在开裂的问题,同时刷子在进行涂刷时会出现胶液的滴落浪费现象。
3.根据公开专利cn202011423747.x,公开了一种智能制造基于液压的鞋底自动定位均匀涂胶装置,包括壳体,所述壳体的内部活动连接有转动丝杆,所述转动丝杆连接有自动定位鞋底均匀涂胶防滴落机构以及自动喷射清新剂机构,通过当鞋底放置于壳体内部的操作台时,此时转动丝杆开始进行转动,转动丝杆的转动带动涂胶轮进行曲形运动挤压鞋底表面进行滚动,此时出胶块收到压力向上运动使得出胶块的凹槽打开出胶口均匀涂刷,同时出胶块带动气囊挤压杆进行摆动,气囊挤压杆的摆动挤压压缩气囊,当涂胶完毕装置进行复位时,此时压缩气囊进行复位重新张开,从而产生负压将胶液回吸,从而达到自动均匀涂抹胶液同时防止胶液滴落的功能。
4.现有技术的不足之处在于,丝杆的主要用途在于传送,如果以机械替代人工的话,那么涂胶则是一个很精密的机械动作,而专利中提供的丝杆驱动的方式涂胶,以及利用压缩气囊对吸收多余的涂胶是不现实的,因此丝杆多被用于传送,很少被用于高精度的动作执行件,并且采用的气囊吸收的方式,无法把握吸收的力度,则会造成压缩气囊吸收过多而影响粘结。
技术实现要素:
5.解决的技术问题
6.本发明提供的一种智能鞋底打胶系统,旨在降低人工参与,同时提高机械涂胶的精密度以及涂胶量的控制。
7.技术方案
8.为解决上述技术问题,本发明的实施例采用的技术方案是:一种智能鞋底打胶系统,包括:
9.固定打胶枪用的固定支架,所述固定支架被装配用于使所述打胶枪竖直方向高度可调;
10.设置有负压吸附单元的鞋托板组件,所述负压吸附单元被装配用于对放置于所述鞋托板组件上的鞋底进行吸附固定;
11.机座,所述机座上设置有xy轴移动机构以及主控平移机构,所述固定支架装配于所述主控平移机构,所述主控平移机构装配于所述xy轴移动机构,其中:
12.所述主控平移机构的行程包括行程一和行程二,具体的:
13.行程一,驱使所述固定支架靠近所述鞋托板组件,xy轴移动机构作工旋转以配合
所述打胶枪对鞋底侧边进行涂胶;
14.行程二,驱使所述固定支架远离所述鞋托板组件,xy轴移动机构电路断开,负压吸附单元电路断开。
15.作为优选,所述固定支架包括基板、导向架、导滑座和抱箍座,所述导向架的数量为两个、并对称安装于所述基板的顶部,所述抱箍座上设置有螺纹杆,所述抱箍座通过螺纹杆装配于所述导滑座上、以使固定于所述抱箍座上的打胶枪旋转角度可调,所述导滑座滑动设置于所述导向架上。
16.作为优选,所述导滑座上螺纹连接有旋钮,所述旋钮被装配用于使所述导滑座锁止于所述导向架上的任一高度。
17.作为优选,所述鞋托板组件包括鞋垫板和外罩,所述外罩上开设有凹槽,且装配于所述鞋垫板上的时所述鞋垫板顶部设置的鞋垫模型部位于该凹槽内。
18.作为优选,所述负压吸附单元包括橡胶垫、气嘴柱以及抽气机,所述橡胶垫粘结于所述鞋托板组件上的鞋垫模型部上,而鞋垫模型部上开设有贯穿所述橡胶垫的安装孔,且所述气嘴柱安装于所述安装孔内,所述抽气机的进气口与所述气嘴柱的尾端相连通。
19.作为优选,所述主控平移机构包括对称分布的导轨以及滑动设置于所述导轨上的液压滑动座,所述固定支架上的基板安装于两个液压滑动座的顶部。
20.作为优选,所述主控平移机构还包括安装于所述导轨左右两端的限位块,两个所述限位块相邻一侧的外壁分别设置有触发开关,所述触发开关被装配用于受基板撞击触发,使主控平移机构完成行程一和行程二的指令。
21.作为优选,所述xy轴移动机构包括x移动机构和y轴移动机构,所述y轴移动机构y轴移动机构包括导向台、步进电机、丝杆以及滑动块,所述导向台的顶部对称设置有滑轨,且滑动块滑动设置于所述滑轨上,所述步进电机安装于所述导向台,所述丝杆轴向转动设置于所述导向台的两个滑轨之间,并通过所述步进电机驱动保持同步旋转,所述滑动块螺纹连接于所述丝杆上,其中:
22.所述x移动机构上的滑动块以及滑动块均安装于所述鞋托板组件上的鞋垫板的底部;
23.所述y轴移动机构上的滑动块以及滑动块均安装于所述x移动机构上的导向台的底部。
24.与现有技术相比,本发明的实施例所提供的一种智能鞋底打胶系统,具备以下有益效果:使用的时候,将鞋子放置在鞋垫板上,负压吸附单元检测到鞋垫从而驱动抽气机通过气嘴柱抽气,使得鞋垫板负压吸附在橡胶垫上;然后,主控平移机构先后完成行程一和形成二,操作者将鞋垫取下即可,整个操作过程中无需多余人工进行参与,并且采用的xy轴移动机构驱动更加精确,使得涂胶的精确度得到保证。再者,方案采用两次涂胶的方式,每次涂胶的量是可控的,并且可以保证涂胶的量的可控。
25.应当理解,前面的一般描述和以下详细描述都仅是示例性和说明性的,而不是用于限制本公开。
26.本技术文件提供本公开中描述的技术的各种实现或示例的概述,并不是所公开技术的全部范围或所有特征的全面公开。
附图说明
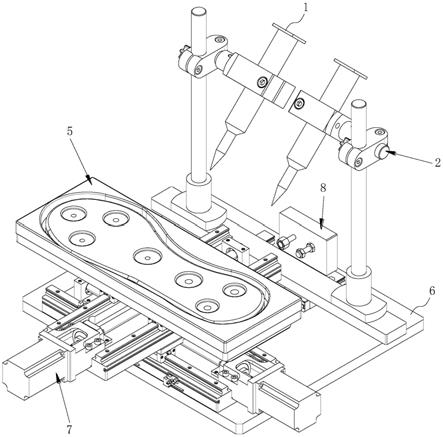
27.图1为本发明整体结构示意图;
28.图2为本发明固定支架和主控平移机构装配结构示意图;
29.图3为本发明打胶枪的固定结构示意图;
30.图4为本发明打胶枪的鞋垫板和负压吸附单元结构示意图;
31.图5为本发明打胶枪的xy轴移动机构结构示意图。
32.图中:1、打胶枪;2、固定支架;21、基板;22、导向架;23、导滑座;24、抱箍座;25、旋钮;4、负压吸附单元;41、橡胶垫;42、气嘴柱;5、鞋托板组件;51、鞋垫板;52、外罩;53、鞋垫模型部;6、机座;7、xy轴移动机构;71、导向台;72、步进电机;73、丝杆;74、滑动块;8、主控平移机构;81、导轨;82、液压滑动座;83、限位块;84、触发开关。
具体实施方式
33.使得本公开实施例的目的、技术方案和优点更加清楚,下面将结合本公开实施例的附图,对本公开实施例的技术方案进行清楚、完整地描述。显然,所描述的实施例是本公开的一部分实施例,而不是全部的实施例。基于所描述的本公开的实施例,本领域普通技术人员在无需创造性劳动的前提下所获得的所有其他实施例,都属于本公开保护的范围。
34.除非另外定义,本公开使用的技术术语或者科学术语应当为本公开所属领域内具有一般技能的人士所理解的通常意义。本公开中使用的“包括”或者“包含”等类似的词语意指出现该词前面的元件或者物件涵盖出现在该词后面列举的元件或者物件及其等同,而不排除其他元件或者物件。“连接”或者“相连”等类似的词语并非限定于物理的或者机械的连接,还可以包括电性的连接,不管是直接的还是间接的。“上”、“下”、“左”、“右”等仅用于表示相对位置关系,当被描述对象的绝对位置改变后,则该相对位置关系也可能相应地改变。
35.如图1至图5所示,本发明提供的一种智能鞋底打胶系统,包括:
36.固定打胶枪1用的固定支架2,固定支架2被装配用于使打胶枪1竖直方向高度可调。
37.实施例中,根据图1和图2可知,该固定支架2包括基板21、导向架22、导滑座23和抱箍座24,导向架22的数量为两个、并对称安装于基板21的顶部,抱箍座24上设置有螺纹杆,抱箍座24通过螺纹杆装配于导滑座23上、以使固定于抱箍座24上的打胶枪1旋转角度可调,导滑座23滑动设置于导向架22上。在具体的实施过程中,操作者松开螺纹杆的抵扣螺帽,然后旋转螺纹杆从而实现对抱箍座24的旋转角度的调节,完成调节之后,旋转抵扣螺帽低固于导滑座23侧壁上实现固定。
38.需要说明的是,实施例中的打胶枪1与外接的供胶系统相连通,且两个打胶枪1出胶量相同,通过两边涂胶,即保证了节约,同时也保证了涂胶的质量(该供胶系统属于先公开技术,不做详细赘述)。
39.再者,导滑座23上螺纹连接有旋钮25,旋钮25被装配用于使导滑座23锁止于导向架22上的任一高度。在具体的实施过程中,旋转旋钮25,然后手动调整打胶枪1胶口的位置即可(相同规格的鞋垫的厚度的是相同的,该调整主要为试用产线生产系列鞋垫的需求而设计)。
40.设置有负压吸附单元4的鞋托板组件5,负压吸附单元4被装配用于对放置于鞋托
板组件5上的鞋底进行吸附固定。
41.实施例中,根据图1和图2可知,鞋托板组件5包括鞋垫板51和外罩52,外罩52上开设有凹槽,且装配于鞋垫板51上的时鞋垫板51顶部设置的鞋垫模型部53位于该凹槽内。在具体的实施过程中,鞋垫模型部53低于外罩52的上表面,从而形成容纳鞋垫的腔,而鞋垫的涂胶的面高于外罩52的上表面。
42.再者,负压吸附单元4包括橡胶垫41、气嘴柱42以及抽气机,橡胶垫41粘结于鞋托板组件5上的鞋垫模型部53上,而鞋垫模型部53上开设有贯穿橡胶垫41的安装孔,且气嘴柱42安装于安装孔内,抽气机的进气口与气嘴柱42的尾端相连通。在具体的实施过程中,负压吸附单元4检测到鞋垫从而驱动抽气机通过气嘴柱42抽气,使得鞋垫板51负压吸附在橡胶垫41上。
43.机座6上设置有xy轴移动机构7以及主控平移机构8,固定支架2装配于主控平移机构8,主控平移机构8装配于xy轴移动机构7,其中:
44.主控平移机构8的行程包括行程一和行程二,具体的:
45.行程一,驱使固定支架2靠近鞋托板组件5,xy轴移动机构7作工旋转以配合打胶枪1对鞋底侧边进行涂胶;
46.行程二,驱使固定支架2远离鞋托板组件5,xy轴移动机构7电路断开,负压吸附单元4电路断开。
47.实施例中,根据图1和图2可知,主控平移机构8还包括安装于导轨81左右两端的限位块83,两个限位块83相邻一侧的外壁分别设置有触发开关84,触发开关84被装配用于受基板21撞击触发,使主控平移机构8完成行程一和行程二的指令。
48.再者,根据图1和图5所示,xy轴移动机构7包括x移动机构和y轴移动机构,y轴移动机构y轴移动机构包括导向台71、步进电机72、丝杆73以及滑动块74,导向台71的顶部对称设置有滑轨,且滑动块74滑动设置于滑轨上,步进电机72安装于导向台71,丝杆73轴向转动设置于导向台71的两个滑轨之间,并通过步进电机72驱动保持同步旋转,滑动块74螺纹连接于丝杆73上,其中:
49.x移动机构上的滑动块74以及滑动块74均安装于鞋托板组件5上的鞋垫板51的底部;
50.y轴移动机构上的滑动块74以及滑动块74均安装于x移动机构上的导向台71的底部。
51.工作原理:将鞋子放置在鞋垫板51上,负压吸附单元4检测到鞋垫从而驱动抽气机通过气嘴柱42抽气,使得鞋垫板51负压吸附在橡胶垫41上;然后,主控平移机构8先后完成行程一和形成二,操作者将鞋垫取下即可,整个操作过程中无需多余人工进行参与,并且采用的xy轴移动机构7驱动更加精确,使得涂胶的精确度得到保证。再者,方案采用两次涂胶的方式,每次涂胶的量是可控的,并且可以保证涂胶的量的可控。
52.以上实施例仅为本发明的示例性实施例,不用于限制本发明,本发明的保护范围由权利要求书限定。本领域技术人员可以在本发明的实质和保护范围内,对本发明做出各种修改或等同替换,这种修改或等同替换也应视为落在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1