一种新型外骨骼控制方案的制作方法
[0001]
本发明涉及外骨骼技术领域,具体为一种新型外骨骼控制方案。
背景技术:
[0002]
当前的康复外骨骼控制方案大体上分为两种,主动式的和被动式的(主动式的是采集使用者的一些信息,肌电信号、脑电信号或者感知一些弱的力信号,根据这些信号来对外骨骼进行相关的一些控制)。肌电信号和脑电信号的获取基本上有两种方式,一种是采用接触式的,通过感应电极的贴合,采集一些电信号,这类信号采集方式得到的信号很微弱,因此在误判方面就存在很大问题。与之相似的一类是采用一种嵌入式的信号采集方式,通过将采集设备植入人体达到对信号的采集,优点是信号强度有保证并且信号比较干净,缺点是由于采用了侵入式的信号采集方式,往往会造成伤口感染。随着近些年的发展,外骨骼在各个领域的应用也越来越多,在调查中发现,当前下肢有问题的病患中,他们的手指基本上都是可以正常使用的,而仅仅是自己的下肢没有知觉或者下肢没有力量,不能提供足够的力量来使得自己站起来,自主行走。
技术实现要素:
[0003]
(一)解决的技术问题
[0004]
针对现有技术的不足,本发明提供了一种新型外骨骼控制方案,具备学习成本低、控制方式简单、信号强度高等优点,解决了控制方式复杂、信号强度低的问题。
[0005]
(二)技术方案
[0006]
为实现学习成本低、控制方式简单、信号强度高目的,本发明提供如下技术方案:一种新型外骨骼控制方案,其特征在于,包括以下步骤:
[0007]
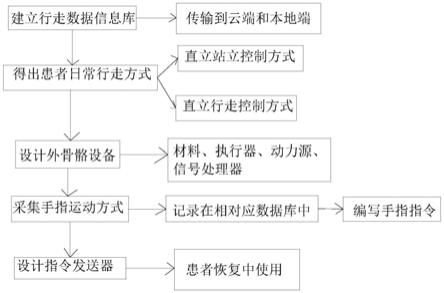
1)建立患者行走习惯的数据信息库,并传输到云端和本地端,记录在硬盘和云盘中,根据患者习惯结合切合实际的大数据算法对数据进行分析和处理,具体为:
[0008]
101)大范围的进行数据采样,包括正常人、轻度患者和重度患者,并深入调研,对数据进行筛选,留下可供处理和记录的有用数据;
[0009]
102)建立云端数据中心,所有的数据资料都存储在数据中心中,并在线下具体外骨骼使用地设置数据硬盘,与云端互通,建立数据的共享桥梁,帮助改善患者体验和改进外骨骼的使用效果;
[0010]
103)用大数据算法对采集来的数据进行分析和处理,保留百分之八十以上的相同数据,并以此作为之后工作的具体设计样本。
[0011]
2)处理得出患者日常行走方式,分别设计出两种日常控制方式,计算出行走速度、跨度、角度,并运用逻辑编程编写相应的指令,存储在终端程序库中,具体为:
[0012]
201)两种日常控制方式为直立站立控制方式和直立行走控制方式,直立站立控制方式为外骨骼大腿部支架和膝关节处助力器相配合,给予患者向上的支撑力,并降低外骨骼的工作幅度,使患者没有强大的受力感;
[0013]
202)直立行走控制方式为腰部执行器和大腿部支架配合,小腿部支架的动力单元工作,产生扭矩,辅助患者直立行走,并适当提高小腿部支架运动时的离地高度,并适当循序渐进的增大患者的行走幅度,使其更快的恢复自主直立行走;
[0014]
203)直立站立控制方式包括四个指令,第一是从坐姿调整到直立的调整指令,第二是保持直立站立的保持指令,第三是从直立站立到直立行走的调整指令,第四是从直立站立调整到坐姿的调整指令,对其分别编程;
[0015]
204)直立行走控制方式包括五个指令,第一是较慢速前进的行走指令,第二是慢速前进的行走指令,第三是左拐弯的拐弯指令,第四是右拐弯的拐弯指令,第五是从行走指令调整到直立站立的调整指令,对其分别编程。
[0016]
3)根据人体工学结构设计出一套与大部分患者配套的外骨骼设备,采用合金和合成塑料材料,设置多个动力源和执行器,并安装多个信号处理器,具体为:
[0017]
301)采用碳纤维材质和合成金属材质,具有较好的可塑性,便于患者穿戴和取下,并在穿戴过程中,保证患者穿戴的舒适程度;
[0018]
302)动力源采用电力,采用电池板方式,固定安装在大腿部外骨骼的一侧,并开设充电插口
[0019]
303)执行器安装在关节处、大腿部、小腿部和胯部的外骨骼部,共有八个,采用小型步进电机和小型气缸,并安装在侧部,不影响患者的穿戴效果。
[0020]
4)进行多种采集样本的数据采集,采集大部分患者的手指运动方式,并记录在与行走习惯相对应的数据库中,采用比较和结合的方法,得出患者常用的手指执行动作,并与一种特定的行走方式相对应,对其编写指令,为行走指令的启动指令,具体为:
[0021]
401)对健康人、轻度患者和重度患者的手指运动方式进行广泛的采集样本,进行逻辑分析,包括手指的动作角度、具体的行程,再储存进数据库进行比对和筛选,选出百分之八十相似的手指运动方式,并以此作为之后工作的可用数据;
[0022]
402)经比对发现,就单个手而言每一个手指可以执行一种动作(5种),还可以采用伸出不同手指的组合(2个手指的组合有10种;3个手指的组合有10种;4个手指的组合有5种;5个手指的组合有1种;)共计31种,舍弃掉无用复杂的手指操作,与下肢外骨骼动作一一对应,留下9种手指运动;
[0023]
403)左右手只选一只手进行交互,大拇指从正常状态伸出,相对的是从坐姿调整到直立的调整指令,食指从正常状态伸出,相对的是保持直立站立的保持指令,中指从正常状态伸出,相对的是从直立站立到直立行走的调整指令,小拇指从正常状态伸出,相对的是从直立站立调整到坐姿的调整指令,大拇指快速摆动两次,相对的是较慢速前进的行走指令,食指快速摆动两次,相对的是慢速前进的行走指令,中指快速摆动两次,相对的是左拐弯的拐弯指令,小拇指快速摆动两次,相对的是右拐弯的拐弯指令,食指和中指快速摆动两次,相对的是从行走指令调整到直立站立的调整指令。
[0024]
5)设计出一种有效的指令发送器,使患者能够方便的佩戴在手部上,并不影响日常生活,并且信号要求要强,降低误操作的机率,外骨骼的主要目的是帮助患者恢复日常行走能力,并不是让患者日常依赖外骨骼进行行走,所以要减少指令的多样性,保留主要指令,并且操作简单,降低患者的学习成本,以便于外骨骼设备的大面积推广。
[0025]
优选的,所述云端数据中心为智能式,可根据患者的反馈和各个外骨骼的具体使
用调整数据的优先程度;
[0026]
优选的,两种日常控制方式和手指运动方式一一对应,并对其可行性进行调研;
[0027]
优选的,交互方式为大部分使用左手进行交互,右手一般用来把扶扶手,或被患者用来做其他工作,对左撇子患者,设计出相同的左手交互方式;
[0028]
优选的,指令发送器为内接触传感器,与人手接触,并在人手上佩戴专用手套,手套的厚度为0.2厘米,并采用无线方式进行信号传输,与信号处理器的距离很近,信号强度较高。
[0029]
(三)有益效果
[0030]
与现有技术相比,本发明提供了一种新型外骨骼控制方案,具备以下有益效果:
[0031]
1、该新型外骨骼控制方案,通过外骨骼采用了正常的操作方式,方案仅仅是建立起来一套通过手指的动作去控制外骨骼动作的一种新的交互逻辑,对于使用者来说,他们唯一需要做的就是将各种交互操作的指令动作记下来,其他的都不需要考虑,学习成本较低,并且能够与云端数据进行同步,使外骨骼的操作更加完善,不断的学习和进化,使其具有初步的智能形态,使用价值更高。
[0032]
2、该新型外骨骼控制方案,通过手指的不同动作与外骨骼设备进行交互,大大简化了外骨骼的控制过程,能让使用者以一种最轻松的方式进行外骨骼的控制操作,并且穿戴舒适,通过特制手套佩戴在手上,左右手均可控制,另一只手可干其他事情,扶着扶手,并且采用无线形式进行信号传输,免去了线路拖拽的烦恼,使结构简化,并且手套上的指令发送器与外骨骼上的信号处理器距离较近,信号强度高,传输速度快,反应迅速。
附图说明
[0033]
图1为本发明提出的一种新型外骨骼控制方案的结构示意图;
[0034]
图2为本发明提出的一种新型外骨骼控制方案的第一指令结构示意图;
[0035]
图3为本发明提出的一种新型外骨骼控制方案的第二指令结构示意图。
具体实施方式
[0036]
下面将结合本发明的实施例,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0037]
实施例一:建立患者行走习惯的数据信息库,并传输到云端和本地端,记录在硬盘和云盘中,根据患者习惯结合切合实际的大数据算法对数据进行分析和处理,具体为:
[0038]
101)大范围的进行数据采样,包括正常人、轻度患者和重度患者,并深入调研,对数据进行筛选,留下可供处理和记录的有用数据;
[0039]
102)建立云端数据中心,所有的数据资料都存储在数据中心中,并在线下具体外骨骼使用地设置数据硬盘,与云端互通,建立数据的共享桥梁,帮助改善患者体验和改进外骨骼的使用效果;
[0040]
103)用大数据算法对采集来的数据进行分析和处理,保留百分之八十以上的相同数据,并以此作为之后工作的具体设计样本。
[0041]
实施例二:处理得出患者日常行走方式,分别设计出两种日常控制方式,计算出行走速度、跨度、角度,并运用逻辑编程编写相应的指令,存储在终端程序库中,具体为:
[0042]
201)两种日常控制方式为直立站立控制方式和直立行走控制方式,直立站立控制方式为外骨骼大腿部支架和膝关节处助力器相配合,给予患者向上的支撑力,并降低外骨骼的工作幅度,使患者没有强大的受力感;
[0043]
202)直立行走控制方式为腰部执行器和大腿部支架配合,小腿部支架的动力单元工作,产生扭矩,辅助患者直立行走,并适当提高小腿部支架运动时的离地高度,并适当循序渐进的增大患者的行走幅度,使其更快的恢复自主直立行走;
[0044]
203)直立站立控制方式包括四个指令,第一是从坐姿调整到直立的调整指令,第二是保持直立站立的保持指令,第三是从直立站立到直立行走的调整指令,第四是从直立站立调整到坐姿的调整指令,对其分别编程;
[0045]
204)直立行走控制方式包括五个指令,第一是较慢速前进的行走指令,第二是慢速前进的行走指令,第三是左拐弯的拐弯指令,第四是右拐弯的拐弯指令,第五是从行走指令调整到直立站立的调整指令,对其分别编程。
[0046]
实施例三:根据人体工学结构设计出一套与大部分患者配套的外骨骼设备,采用合金和合成塑料材料,设置多个动力源和执行器,并安装多个信号处理器,具体为:
[0047]
301)采用碳纤维材质和合成金属材质,具有较好的可塑性,便于患者穿戴和取下,并在穿戴过程中,保证患者穿戴的舒适程度;
[0048]
302)动力源采用电力,采用电池板方式,固定安装在大腿部外骨骼的一侧,并开设充电插口
[0049]
303)执行器安装在关节处、大腿部、小腿部和胯部的外骨骼部,共有八个,采用小型步进电机和小型气缸,并安装在侧部,不影响患者的穿戴效果。
[0050]
实施例四:进行多种采集样本的数据采集,采集大部分患者的手指运动方式,并记录在与行走习惯相对应的数据库中,采用比较和结合的方法,得出患者常用的手指执行动作,并与一种特定的行走方式相对应,对其编写指令,为行走指令的启动指令,具体为:
[0051]
401)对健康人、轻度患者和重度患者的手指运动方式进行广泛的采集样本,进行逻辑分析,包括手指的动作角度、具体的行程,再储存进数据库进行比对和筛选,选出百分之八十相似的手指运动方式,并以此作为之后工作的可用数据;
[0052]
402)经比对发现,就单个手而言每一个手指可以执行一种动作(5种),还可以采用伸出不同手指的组合(2个手指的组合有10种;3个手指的组合有10种;4个手指的组合有5种;5个手指的组合有1种;)共计31种,舍弃掉无用复杂的手指操作,与下肢外骨骼动作一一对应,留下9种手指运动;
[0053]
403)左右手只选一只手进行交互,大拇指从正常状态伸出,相对的是从坐姿调整到直立的调整指令,食指从正常状态伸出,相对的是保持直立站立的保持指令,中指从正常状态伸出,相对的是从直立站立到直立行走的调整指令,小拇指从正常状态伸出,相对的是从直立站立调整到坐姿的调整指令,大拇指快速摆动两次,相对的是较慢速前进的行走指令,食指快速摆动两次,相对的是慢速前进的行走指令,中指快速摆动两次,相对的是左拐弯的拐弯指令,小拇指快速摆动两次,相对的是右拐弯的拐弯指令,食指和中指快速摆动两次,相对的是从行走指令调整到直立站立的调整指令。
[0054]
实施例五:设计出一种有效的指令发送器,使患者能够方便的佩戴在手部上,并不影响日常生活,并且信号要求要强,降低误操作的机率,外骨骼的主要目的是帮助患者恢复日常行走能力,并不是让患者日常依赖外骨骼进行行走,所以要减少指令的多样性,保留主要指令,并且操作简单,降低患者的学习成本,以便于外骨骼设备的大面积推广。
[0055]
本发明的有益效果是:通过外骨骼采用了正常的操作方式,方案仅仅是建立起来一套通过手指的动作去控制外骨骼动作的一种新的交互逻辑,对于使用者来说,他们唯一需要做的就是将各种交互操作的指令动作记下来,其他的都不需要考虑,学习成本较低,并且能够与云端数据进行同步,使外骨骼的操作更加完善,不断的学习和进化,使其具有初步的智能形态,使用价值更高;通过手指的不同动作与外骨骼设备进行交互,大大简化了外骨骼的控制过程,能让使用者以一种最轻松的方式进行外骨骼的控制操作,并且穿戴舒适,通过特制手套佩戴在手上,左右手均可控制,另一只手可干其他事情,扶着扶手,并且采用无线形式进行信号传输,免去了线路拖拽的烦恼,使结构简化,并且手套上的指令发送器与外骨骼上的信号处理器距离较近,信号强度高,传输速度快,反应迅速。
[0056]
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1