用于输送植入物的手柄、导管组件及输送系统的制作方法
1.本发明涉及医疗器械技术领域,尤其涉及一种用于输送植入物的手柄、导管组件及输送系统。
背景技术:
2.经调查显示,中老年人患有冠心病、心脑血管病、心脏瓣膜病、肿瘤等疾病的几率逐年上升。这些疾病直接影响到中老年人的生活质量甚至生命安全。传统外科手术治疗仍是重病患者的首选治疗手段,但是对于高龄、合并多器官疾病、有开胸手术史以及身体恢复功能较差的患者来说,传统外科手术的风险大、死亡率高,部分患者甚至没有手术的机会。近十年来,国际上介入治疗术经过不断的探索已经取得了明显的进步,成为介入治疗领域最具发展前景的分支。
3.介入治疗术是国际近年来研发的一种全新的治疗技术,其原理是利用现代高科技手段进行的一种微小创伤治疗,在医学影像设备的引导下,将特制精密器械引入人体,对体内病变进行诊断和局部治疗。这项技术具有不开刀、创伤小、恢复快、效果好等特点,避免了传统外科手术对病人造成的危害。
4.手柄作为整个介入治疗的动力源,通常有纯手动手柄、纯电动手柄或者手动电动混合手柄,均需保证足够的安全性、有效性、经济性。一方面,在手术时手柄有失效的风险,如果现有手柄出现安全故障,一般只能采取介入手术紧急转为外科手术的方案,这会给患者带来更大的身体创伤甚至威胁到生命;另一方面,手柄包含的零部件较多,目前市面上的手柄不可以重复使用,所以成本较高,相对应的手术费用较高,患者经济压力较大。
技术实现要素:
5.本发明所要解决的技术问题是提供一种用于输送植入物的手柄、导管组件及输送系统,手术过程中手柄出现故障时可以快速更换手柄,避免手术风险,同时,可以提高手柄的利用率、降低成本。
6.本发明为解决上述技术问题而采用的技术方案是提供一种用于输送植入物的手柄,包括手柄壳体、驱动装置和传动部件;所述手柄壳体上设置有镂空的第一开槽,所述手柄壳体上设置有第一连接件,所述第一连接件用于与导管组件可拆卸连接;所述驱动装置与所述传动部件相连,并控制所述传动部件进行运动;所述传动部件设置在所述手柄壳体内,所述传动部件包括驱动块,所述驱动块在所述驱动装置的控制下向所述手柄的近端或远端移动。
7.优选地,所述驱动装置包括开关、电源、控制板和电机,所述开关和所述电源连接,所述电源和所述控制板连接,所述控制板和所述电机连接,所述电机具有输出端,所述控制板控制所述电机的输出端做旋转运动。
8.优选地,所述传动部件包括第一大齿轮、第一小齿轮和丝杆,所述第一大齿轮和所述电机的输出端同轴并固定连接,所述第一大齿轮和所述第一小齿轮啮合连接,所述第一
小齿轮和所述丝杆同轴且与所述丝杆的一端固定连接,所述丝杆上匹配连接有固定部件,所述驱动块固定在所述固定部件上。
9.优选地,所述传动部件包括丝杆和联轴器,所述丝杆与所述电机的输出端同轴设置,所述联轴器的一端和所述电机的输出端固定连接,所述联轴器的另一端和所述丝杆的一端固定连接,所述丝杆上匹配连接有固定部件,所述驱动块固定在所述固定部件上。
10.优选地,所述驱动装置包括手动旋转件和齿轮轴,所述传动部件包括第二大齿轮和第二小齿轮,所述手动旋转件包括固定连接的手控部件和旋转轴,所述手控部件设置在所述手柄壳体外,所述旋转轴穿过所述手柄壳体和所述齿轮轴同轴并固定连接,所述齿轮轴和所述第二大齿轮同轴并与所述齿轮轴固定连接,所述第二大齿轮和所述第二小齿轮啮合连接,所述第二小齿轮和所述丝杆同轴且和所述丝杆的另一端固定连接。
11.优选地,所述驱动装置包括手动旋转件和齿轮轴,所述手旋转件包括固定连接的手控部件和旋转轴,所述手控部件设置在所述手柄壳体外,所述旋转轴穿过所述手柄壳体和所述齿轮轴同轴设置并固定连接。
12.优选地,所述传动部件包括第二大齿轮、第二小齿轮和丝杆,所述第二大齿轮和所述齿轮轴同轴并固定连接,所述第一大齿轮和所述第一小齿轮啮合连接,所述第一小齿轮和所述丝杆同轴且和所述丝杆的一端固定连接,所述丝杆上匹配连接有固定部件,所述驱动块固定在所述固定部件上。
13.优选地,所述驱动装置包括开关、电源、控制板和电机,所述开关和所述电源连接,所述电源和所述控制板连接,所述控制板和所述电机连接,所述电机具有电机轴,所述控制板控制所述电机轴在轴向上做往复运动。
14.优选地,所述驱动块固定在所述电机轴上。
15.本发明为解决上述技术问题而采用的另一技术方案是提供一种用于输送植入物的导管组件,所述导管组件包括导管组件壳体、内管、外管和外管座;所述导管组件壳体上设置有第二连接件,所述第二连接件用于与手柄可拆卸连接,所述导管组件壳体上设置有镂空的第二开槽;所述内管贯穿所述外管座并置于所述外管内,所述外管座可活动地套设在所述内管外,所述外管座的远端与所述外管的近端固定连接。
16.优选地,包括内管排空管,所述内管排空管的近端设置在所述导管组件壳体近端的外壳上,所述内管排空管的远端与所述内管的近端固定连接。
17.优选地,所述外管座上设置有与所述外管连通的外管排空管,所述外管排空管伸出于所述导管组件壳体之外。
18.优选地,所述导管组件包括稳定管座和稳定管,所述稳定管座固定于所述导管组件壳体的远端,所述稳定管的近端与所述稳定固定座的远端固定连接,所述外管的远端贯穿通过所述稳定固定座和所述稳定管。
19.优选地,所述稳定固定座上设置有与所述稳定管连通的稳定管排空管,所述稳定管排空管伸出并外露于所述导管组件壳体。
20.本发明为解决上述技术问题而采用的另一技术方案是提供一种用于输送植入物的输送系统,包括上述手柄和上述导管组件,所述第二连接件和所述第一连接件可拆卸连接,所述第二开槽和所述手柄壳体上第一开槽的位置和形状相匹配;所述外管座与所述驱动块在轴向上固定连接,且在第三方向可拆卸连接。
21.优选地,所述驱动块上具有第一凹槽,所述外管座上具有第二凹槽,所述第一凹槽匹配嵌套入所述第二凹槽内。
22.优选地,所述第一连接件和所述第二连接件可拆卸连接方式为卡槽连接、螺纹连接、卡扣连接、插销连接或花键连接。
23.优选地,所述第一连接件和所述第二连接件的连接方式为卡槽连接,所述第一连接件具有拆卸按键和第三开槽,所述第二连接件为在第三方向具有限位部件的凸起,所述手柄壳体上设置有第一过孔和第二过孔,所述第一连接件的近端通过所述第一过孔使所述第三开槽位于所述手柄壳体的内侧,所述拆卸按键位于所述手柄壳体的外侧,所述手柄壳体上具有锁紧位和拆卸位,所述拆卸按键可在锁紧位和拆卸位之间拨动切换;所述凸起穿过所述第二过孔后位于所述手柄壳体的内侧,拨动所述拆卸按键至锁紧位时,所述第三开槽卡住所述凸起。
24.本发明对比现有技术有如下的有益效果:本发明提供的用于输送植入物的手柄、导管组件及其输送系统,手柄和导管组件之间采用可拆卸的连接方式,在手术过程中如发生手柄故障,可快速拆卸手柄并进行更换,因此,本发明可快速应对手柄失效的安全风险,避免因手柄问题由介入手术转为外科手术而给患者带来更大的创伤。同时手柄和导管组件分体设计使得手柄可重复利用,降低每次手术的费用,减小了患者的经济压力。导管组件和手柄各自成独立整体,使得手柄操作和导管组件的排空操作互不影响。
附图说明
25.图1为本发明实施例中输送系统的整体结构示意图;
26.图2为本发明实施例中输送系统的内部结构示意图
27.图3为本发明实施例中手柄的内部结构示意图;
28.图4为本发明实施例中导管组件的内部结构示意图;
29.图5为本发明实施例中输送系统的可拆卸连接部件的局部爆炸图;
30.图6为本发明实施例中驱动块的结构示意图;
31.图7为本发明实施例中输送系统的整体结构示意图;
32.图8为本发明实施例中内管组件的局部放大图。
33.图中:
34.1手柄
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
2导管组件
ꢀꢀꢀꢀꢀꢀꢀ
101第一壳体
ꢀꢀꢀꢀ
102第二壳体
35.103开关
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
104电源
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
105控制板
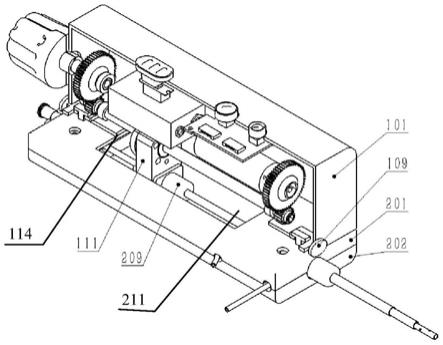
ꢀꢀꢀꢀꢀꢀ
106电机
36.107第一大齿轮
ꢀꢀꢀꢀ
108第一小齿轮
ꢀꢀꢀ
109第一连接件
ꢀꢀ
110丝杆
37.111驱动块
ꢀꢀꢀꢀꢀꢀꢀꢀ
112手动旋转件
ꢀꢀꢀ
113齿轮轴
ꢀꢀꢀꢀꢀꢀ
114第一开槽
38.115第二大齿轮
ꢀꢀꢀꢀ
116第二小齿轮
ꢀꢀꢀ
117控制键
ꢀꢀꢀꢀꢀꢀ
201第三壳体
39.202第四壳体
ꢀꢀꢀꢀꢀꢀ
203稳定管座
ꢀꢀꢀꢀꢀ
204稳定管
ꢀꢀꢀꢀꢀꢀ
205外管
40.206内管组件
ꢀꢀꢀꢀꢀꢀ
207稳定管排空管 208外管排空管
ꢀꢀ
209外管座
41.210内管排空管
ꢀꢀꢀꢀ
211第二开槽
ꢀꢀꢀꢀꢀ
1011第一过孔
ꢀꢀꢀ
1012第二过孔
42.2011凸起
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1092拆卸按键
ꢀꢀꢀꢀ
1091第三开槽
ꢀꢀꢀ
1111第一凹槽
43.1121手控部件
ꢀꢀꢀꢀꢀ
1122旋转轴
44.2091第二凹槽
ꢀꢀꢀꢀꢀ
2061锥形头
ꢀꢀꢀꢀꢀꢀ
2062固定头
ꢀꢀꢀꢀꢀ
2063内管
45.3植入体
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
10手柄壳体
ꢀꢀꢀꢀꢀꢀ
20导管组件壳体
具体实施方式
46.下面结合附图和实施例对本发明作进一步的描述。
47.需要说明的是,本发明所使用的术语“内”、“外”、“上”、“下”以及类似的表述只是为了说明的目的,并不表示是唯一的实施方式。本发明使用了“远端”、“近端”、“轴向”、“第一方向”、“第二方向”、“第三方向”,其中“远端”是远离输送系统操作者的一侧;“近端”是接近输送系统操作者的一侧;“轴向”参照的是外管的轴线方向,也即“第一方向”;“第二方向”参照的是在水平面与外管的轴线垂直的方向;“第三方向”参照的是在竖直面与外管的轴线垂直的方向。
48.本发明提供一种可拆卸的手柄,如果手柄在手术时失效,可以快速拆卸失效的手柄进行更换,然后继续进行手术,不影响手术进程。同时,手术结束后可拆卸的手柄可单独拆卸下来进行灭菌消毒,多次重复利用,这样手柄的成本被分摊到多次手术中,从而降低了手柄在一次手术中的费用,减小了患者的经济压力。
49.请参见图1,本实施例提供的用于输送植入物的输送系统包括手柄1和导管组件2,导管组件2处于手柄1的外侧,两者通过可拆卸方式连接。为了便于装配,较佳地,手柄1包括第一壳体101和第二壳体102,第一壳体101和第二壳体102固定连接,导管组件2包括第三壳体201和第四壳体202,第三壳体201和第四壳体202固定连接。
50.请参见图2和图3,手柄1包括手柄壳体10、驱动装置和传动部件。手柄壳体10包括第一壳体101和第二壳体102,在其它实施方式中手柄壳体10也可以采用一整个壳体,本发明对此不做特别限制;手柄壳体10的底部设置有镂空的第一开槽114,手柄壳体10上设置有第一连接件109,手柄壳体10通过第一连接件109实现与导管组件2之间的可拆卸连接。
51.所述驱动装置设置在手柄壳体10的内部和外侧,手柄1可以为纯电动手柄或纯手动手柄,也可以为电动和手动混合手柄。在一实施例中,驱动装置同时包括电动驱动装置和手动驱动装置,所述电动驱动装置包括开关103、电源104、控制板105和电机106,所述手动驱动装置包括手动旋转件112和齿轮轴113。
52.所述传动部件包括第一大齿轮107、第一小齿轮108、第二大齿轮115、第二小齿轮116、丝杆110和驱动块111。
53.具体地,开关103和电源104电连接,电源104和控制板105电连接,控制板105和电机106电连接。电源104和电机106位于手柄壳体10的内部,电源104为手柄1提供动力源。为了便于操作,开关103的一部分嵌入手柄壳体10,另一部分外露于手柄壳体10,外露的部分上设置有操作键,该操作键用于控制电源104与电机106之间的电路通断。与开关103类似,控制板105的一部分嵌入手柄壳体10,另一部分外露于手柄壳体10,外露的部分上设置有控制键117,控制键117用于控制电机106的运行状态,包括启动、前进、后退、停止等。电机106的端部具有输出端,第一大齿轮107与电机106的输出端同轴且周向固定连接,第一小齿轮108与第一大齿轮107啮合连接,且第一小齿轮108与丝杆110同轴并固定连接在丝杆110的远端,丝杆110上匹配连接有固定部件,如螺母,驱动块111固定连接在丝杆110的螺母上。该结构中,电机106和丝杆110的平行设置可以缩短手柄1的长度,从而减小手柄的尺寸。手动旋转件112包括固定连接的手控部件1121和旋转轴1122,为方便手动操作,手动旋转件112
设置在手柄壳体10的近端,手控部件1121设置在手柄壳体10的近端外侧,旋转轴1122穿过手柄壳体10后和齿轮轴113同轴设置并固定连接,齿轮轴113和第二大齿轮115同轴设置并周向固定连接,第二大齿轮115和第二小齿轮116啮合连接,第二小齿轮116和丝杆110同轴设置且和丝杆110的近端固定连接。
54.电动模式下,电机106输出端的旋转运动带动第一大齿轮107旋转运动,然后通过齿轮啮合带动第一小齿轮108旋转运动,进而带动丝杆110旋转运动,使得固定在螺母上的驱动块111进行直线运动。手动模式下,手动旋转件112的旋转运动驱动第二大齿轮115旋转运动,然后通过齿轮啮合带动第二小齿轮116旋转运动,进而带动丝杆110旋转运动,使得固定在螺母上的驱动块111进行直线运动。电动模式和手动模式混合设置,可以起到双保险作用,在其中一种模式失效的情况下有另外一种模式替代,手柄可继续工作,减小手柄的故障概率。
55.在一其它实施方式中,电机106的输出端和丝杆110同轴设置,不需要第一大齿轮107和第一小齿轮108进行传动,丝杆110与电机106的输出端直接通过联轴器(图未示)连接,具体地,所述联轴器的一端和电机106的输出端固定连接,所述联轴器的另一端和丝杆110的远端固定连接,其它结构与前面所述的实施方式相同。在该结构中,电机106输出端的旋转运动直接带动丝杆110的旋转运动,使得固定在螺母上的驱动块111进行直线运动。该实施方式中,电机106的输出端和丝杆110同轴设置,无需通过大小齿轮啮合进行传动,可以简化零部件。
56.在一其它实施方式中,手柄驱动模式可以为纯电动模式或纯手动模式。纯电动手柄中可以去掉如下部件:手动旋转件112、齿轮轴113、第二大齿轮115和第二小齿轮116;纯手动手柄中可以去掉如下部件:开关103、电源104、控制板105、电机106、第一大齿轮107和第一小齿轮108。
57.在一其它实施方式中,电机为直线电机,具有电机轴(图未示),驱动块固定在电机轴上,在控制板的控制下电机轴沿着轴向做直线往复运动,从而带动驱动块做直线运动,该实施例中,无需齿轮进行啮合传动,也不需要设置丝杆,简化了手柄的内部结构。因此,本发明提供的手柄适合于各种驱动结构,可根据实际情况进行设置,只要确保驱动块111可以在轴向上做直线往复运动即可。
58.请参照图4,导管组件2位于手柄1的外侧,包括导管组件壳体20、外管205、内管组件206、外管排空管208、外管座209和内管排空管210;进一步地,导管组件2还包括稳定管座203和稳定管204。为了方便装配,导管组件壳体20包括第三壳体201和第四壳体202,导管组件壳体20上设置有第二连接件,所述第二连接件和第一连接件109可拆卸连接,使得手柄1和导管组件2之间可以快速装配与拆卸。导管组件壳体20的顶面设置有镂空的第二开槽211,第二开槽211和第一开槽114的位置和形状相匹配。在手柄壳体10和导管组件壳体20上对应设置第一开槽114和第二开槽211,一是实现驱动块111和外管座209在此处可拆卸连接,二是提供了驱动块111直线运动时带动外管座209直线运动所需要的活动空间。
59.请参见图8,内管组件206由近端到远端依次包括依次连接的内管2063、固定头2062和锥形头2061。进一步地,内管2063的近端还设置有内管排空管210,内管排空管210的近端设置在导管组件壳体20外侧,内管2063的近端与内管排空管210的远端连接后通过固定件固定在导管组件壳体20的近端,在手术过程中往内管排空管210注入液体可以排空内
管2063中的空气。内管2063贯穿外管座209并置于外管中,外管座209的远端和外管205固定连接,外管座209和外管205在轴向上保持相对静止,外管座209在轴向上运动时带动外管205一起运动;外管座209上还设置有与外管205相通的外管排空管208,外管排空管208伸出并外露于导管组件壳体20,在手术过程中往外管排空管208注入液体时可以排空外管205和内管2063之间的空气,外管座209、外管205和外管排空管208固定连接且可沿轴向做直线运动。
60.在一优选实施例中,外管205上还套设有稳定管座203和稳定管204,稳定管座203固定在导管组件壳体20的远端,较佳地,稳定管座203的远端和稳定管204的近端密封连接,外管205的远端贯穿通过稳定管座203和稳定管204,稳定管204套设在外管205外,覆盖外管205的一部分。外管205可沿内管组件206的外侧及稳定管204、稳定管座203的内侧在轴向上做直线运动。进一步地,稳定管座203还密封连接有与稳定管204相通的稳定管排空管207,稳定管排空管207伸出并外露于导管组件壳体20,在手术过程中往稳定管排空管207中注入液体可以排出外管205和稳定管204中间的空气。稳定管204通过稳定管座203实现对外管205的支撑作用,为较长的导管输送系统提供着力点,在手术过程中为外管205在人体复杂血管中的运动提供着力点,防止外管205与血管摩擦。在其它实施例中,当外管205具有足够的强度时,可取消稳定管204、稳定管排空管207和稳定管座203等部件,内管组件结构也会得到进一步简化。
61.请参见图2、图4和图6,驱动块111与外管座209之间固定并可拆卸连接,在一实施方式中,驱动块111的底部设置有第一凹槽1111,外管座209上设置有第二凹槽2091,第一凹槽1111与第二凹槽2091相互配合,使得驱动块111能嵌套在外管座209上进行插接。具体地,第二凹槽2091沿着第二方向开槽,第二凹槽2091在轴向上的两侧具有限位部件,通过轴向两侧的限位部件限制驱动块111在轴向上相对外管座209运动,使得驱动块111与外管座209在轴向上能够保持相对静止,相应地,第一凹槽1111沿着轴向开槽,第一凹槽1111在第二方向的两侧具有限位部件,通过两侧的限位部件限制了驱动块111在第二方向上相对运动,使驱动块111与外管座209之间在水平面上稳定的固定连接,进而通过驱动块111的直线往复运动带动外管座209进行直线往复运动,最终使得与外管座209固定连接的外管205进行直线往复运动。同时在第三方向上,驱动块111与外管座209之间可拆卸。
62.请参照图2、图3和图5,第一连接件109和导管组件壳体20上的第二连接件可拆卸连接形式可以为卡槽连接、螺纹连接、卡扣连接、插销连接或花键连接等。在一实施例中,以卡槽连接为例,第一连接件109具有拆卸按键1092和第三开槽1091,所述第二连接件为在第三方向上具有限位部件的凸起2011,凸起2011可以为t形、7形或倒l形的凸起,图5所示的凸起2011为t形凸起。手柄壳体10上设置有第一过孔1011和第二过孔1012,手柄组件1与导管组件2连接时,第一连接件109的近端通过第一过孔1011使第三开槽1091位于手柄壳体10的内侧,拆卸按键1092位于手柄壳体10的外侧,手柄壳体10在第二方向上具有锁紧位和拆卸位(图未示),拆卸按键1092可在锁紧位和拆卸位之间拨动切换;当拆卸按键1092处于拆卸位时,凸起2011可穿过第二过孔1012,位于手柄壳体10的内侧,然后在第二方向拨动拆卸按键1092至锁紧位时,第三开槽1091卡住凸起2011,使得导管组件壳体20与手柄壳体10不能脱离。
63.与此同时,调节好驱动块111在丝杆110上的位置,使得第一凹槽1111(如图6所示)
能卡住外管座209上的第二凹槽2091(如图4所示),从而实现手柄1与导管组件2的壳体连接和直线运动的同步。手柄1与导管组件2拆卸时,向另一个方向拨动拆卸按键1092至拆卸位,第三开槽1091与凸起2011在第二方向脱离,导管组件壳体20与手柄壳体10可以在第三方向脱离,同时第一凹槽1111与第二凹槽2091在第三方向脱离。
64.本实施例提供的是在第二方向拨动拆卸按键1092实现卡槽连接,其它实施例中,还可以采用在第一方向轴向上推拉第一连接件109的方式实现卡槽连接。
65.因此,本发明提供的输送系统中的手柄1和导管组件2通过设置在两侧的两个第一连接件109与所述第二连接件实现手柄壳体10和导管组件壳体20的可拆卸连接,同时驱动块111与外管座209也是可拆卸连接,但需保证驱动块111与外管座209连接后在驱动块111的直线运动方向没有相对位移,从而将驱动块111的直线运动转化为外管座209、外管205的直线运动。
66.请参照图7和图8,导管组件2的远端包括依次套接的外管205、内管组件206,外管205套设在内管组件206外。内管组件206由近端到远端依次包括顺序连接的内管2063、固定头2062和锥形头2061。内管组件206上的内管2063和导管组件2上导管组件壳体20的近端固定连接,固定头2062的六个自由度均被限制,用以固定支撑植入体3。通过驱动外管205在轴向上直线往复运动,使外管205相对于内管组件206在轴向上直线往复运动,实现对植入体3的装载、释放和回收等操作。
67.如果想更换故障手柄,拨动两个第一连接件109至拆卸位,可直接将故障手柄1与导管组件2脱离,然后将新的手柄1插入到导管组件2中,对齐驱动块111和外管座209后再次拨动两个第一连接件109至锁紧位即可。
68.如果想重复利用手柄1以降低每次手术的费用,手术结束后,将手柄1与导管组件2脱离,导管组件2作为废弃物处理,手柄1被拿去灭菌消毒后可再次与新的导管组件2配合使用。
69.综上,本发明提供的用于植入物的手柄及输送系统至少具有以下优点:
70.1)手柄1和导管组件2之间可快速装配与拆卸,可快速应对手柄失效的安全风险,避免因手柄问题由介入手术转为外科手术而给患者带来更大的创伤;同时手柄可重复利用,可降低每次手术的费用,减小了患者的经济压力。
71.2)电机106与丝杆110平行设置,可以缩短手柄1的长度,减小手柄的尺寸。
72.3)导管组件2的结构布置集中,即与血液接触的部件如外管组件、内管组件、排空管等都集中布置在导管组件2中,手柄1和导管组件2在结构上各自单独装配成一个整体组件,互相独立,因此,手柄1的手动、电动操作与导管组件2的排空操作互相不影响。手动操作的旋转件、电动操作的按键与导管组件的排空管在空间上有较远的距离,没有运动接触,不会干扰彼此之间的操作。而且排空管处于导管组件2中而不是处于手柄1中,不需要考虑拆卸手柄1带来的密封泄露问题,结构简单可靠,可安全地重复利用。
73.4)导管组件2的远端没有手柄中其他零部件(如旋转件)的阻碍,为功能扩展如植入物释放后导管闭合、内管快速回撤等留下较多的操作空间。
74.5)手柄1无论是电动、手动或者电动手动混合,都可以做成与导管组件2可拆卸的形式,适应范围广。
75.虽然本发明已以较佳实施例揭示如上,然其并非用以限定本发明,任何本领域技
术人员,在不脱离本发明的精神和范围内,当可作些许的修改和完善,因此本发明的保护范围当以权利要求书所界定的为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1