一种基于姿态角超声引导穿刺导航系统及方法与流程
1.本发明涉及医疗器械领域,并且更具体地,涉及超声引导穿刺导航系统及方法。
背景技术:
2.超声定位引导下穿刺,具有实时显示、操作方便等优点,是目前主流穿刺方案,但在穿刺过程中,穿刺针针尖只有位于超声图像平面上才是可见的,实际操作中经常会出现穿刺针偏离超声检查平面导致在超声图像上丢失穿刺针头的位置信息,这意味着,在大多数情况下,医生在超声平面上看不到穿刺针的针尖,将其准确移动到超声检查平面位置难度很大。
3.目前临床上对应的技术方案有两种,一种是使用穿刺架,但由于穿刺架位置相对固定,操作死板,操作过程中无法微调,限制了手术医生的操作空间,所以临床上很少使用;另一种为磁导航定位,但由于易受磁场干扰,且价格昂贵,很难在临床上广泛使用。
技术实现要素:
4.本发明的目的是为了解决上述技术的不足而提供一种基于姿态角(姿态角:物体相对于世界坐标系的一组方向角度定义,以飞机为例,飞机的空中姿态我们可以用俯仰角、航向角、滚转角来定义。)超声引导穿刺导航系统及方法。
5.为了达到上述目的,本发明解决现有技术问题所采用的技术方案是:一种基于姿态角超声引导穿刺导航系统及方法,用于对手术穿刺进行实时动态定位,其硬件设备包含:电脑(或移动智能终端)、基准架(1)、探头姿态角传感器(2)、穿刺针姿态角传感器(3)、穿刺针(4)。
6.下面对以上技术方案作进一步阐述:
7.穿刺前,将基准架(1)固定于超声探头(5)上,穿刺时,将穿刺针(4)固定(或贴靠)于基准架(1)穿刺针卡位上,使超声探头(5)与穿刺针(4)之间形成一个关节,穿刺针可以以基准架(1)穿刺针卡位为中心各个方向偏转,通过电脑(或移动智能终端)主机获取实时超声图像并显示,且获取探头姿态角传感器(2)和穿刺针姿态角传感器(3)姿态角信息,以超声探头(5)为基准计算穿刺导航路径(7)的空间偏转角度并实时动态显示,使医生可以在超声图像上看到预穿刺路径,从而达到有的放矢的穿刺效果。
8.本发明所得到的一种基于姿态角超声引导穿刺导航系统及方法,其利用使医生可以在超声图像上看到预穿刺路径,从而达到有的放矢的特点,对病灶穿刺的实时精准把控,从而大大提高穿刺成功率,缩短病人手术时间,减少创口感染几率,减轻病人痛苦,也降低了手术对医生的技能要求,同时本发明适用于普通超声诊断仪,新增硬件价格低廉,使更多的基层医院能开展此类手术,提高了社会资源的利用率,有益于“看病难”问题的解决。
附图说明
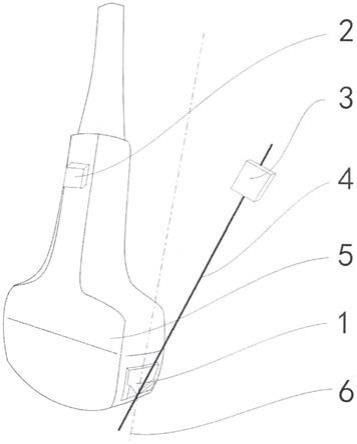
9.图1为本发明的结构示意图;
10.图2为本发明图像显示效果图;
11.图3为本发明基准架(1)结构示意图;
12.图中:1.基准架,2.探头姿态角传感器,3.穿刺针姿态角传感器,4.穿刺针,5.超声探头,6.超声探头基准轴线,7.穿刺导航路径,8.虚拟基准架穿刺针卡位,9.超声图像,10.虚拟超声探头,11.虚拟超声探头基准轴线,12.基准架穿刺针卡位。
具体实施方式
13.下面通过实施结合附图对本发明作进一步的描述,本实例包含:电脑(或移动智能终端)、基准架(1)、探头姿态角传感器(2)、穿刺针姿态角传感器(3)、穿刺针(4)。
14.如图1所示,本实施的具体实施步骤:
15.在穿刺手术前,在所需使用的超声探头一侧或两侧(如图1所示位置)设计一个或两个基准架(1),基准架(1)基底面与探头侧面下缘外形吻合,使基准架(1)基底面与探头相对应位置充分接触,易于固定,固定的方式可以是粘贴的形式;在基准架的下部设计一个漏斗形的、半包围的穿刺针卡位(如图3所示),卡位的缺口大小刚好可以容纳穿刺针(4),穿刺针(4)放入卡位后局部位置固定,但仍可作角度偏转和轴线方向运动,基准架(1)的形态可以是长方形,也可以是其它形态;将探头姿态角传感器(2)固定于超声探头(5)上,将穿刺针姿态角传感器(3)固定于穿刺针(4)上;在超声诊断仪图像输出端(或超声图像处理工作站)获取实时超声图像及图像分辨率信息,并将超声图像实时传输到电脑(或移动智能终端)并显示,图像传输可以是无线传输的形式。
16.在穿刺时,将穿刺针(4)固定(或贴靠)于基准架(1)穿刺针卡位上,此时超声探头(5)与穿刺针中轴线之间形成一个以基准架穿刺针卡位为中心的关节,穿刺针(4)可以以基准架(1)穿刺针卡位为中心各个方向偏转,穿刺针(4)也可以作中轴线方向运动;为了便于理解和计算,我们将过基准架穿刺针卡位中心点且平行于超声探头中轴线的直线作为超声探头基准轴线(6),如图1所示,超声探头基准轴线(6)与穿刺针中轴线之间的关系即为超声探头(5)与穿刺针(4)之间的关系,通过探头姿态角传感器(2)动态获取超声探头姿态角参数,通过穿刺针姿态角传感器(3)动态获取穿刺针姿态角参数,以基准架穿刺针卡位中心点为顶点即可计算穿刺针中轴线相对于超声探头基准轴线的动态空间偏转角度值。
17.在超声图像上,超声图像相对于实物位置即为超声探头检查平面,与超声探头相对应,如图2所示,虚拟超声探头基准轴线(11)的位置即为超声探头基准轴线(6)的位置,虚拟基准架穿刺针卡位(8)的位置即为基准架穿刺针卡位(12)中心点的位置,以虚拟超声探头基准轴线(11)为中心线,以虚拟基准架穿刺针卡位(8)为中心点,可以将穿刺导航路径(7)按前面计算的动态空间偏转角度值动态显示在屏幕上,三维显示(如ar、vr设备)时可以直接显示穿刺导航路径(7)与超声图像平面的角度差,二维显示时可以显示穿刺导航路径(7)在超声图像平面的投影,可以按被穿刺导航路径(7)相对于超声图像平面位置所处设置不同的颜色,如穿刺导航路径(7)在超声图像平面前方的设置为红色,穿刺导航路径(7)在超声图像平面上的设置为绿色,穿刺导航路径(7)在超声图像平面后方的设置为黄色,这样就可以按穿刺导航路径颜色来判断穿刺导航路径(7)是否处于超声图像平面上。
18.在超声图像上找到需要穿刺的目标,调整穿刺针(4)方向,使穿刺导航路径通过穿刺目标且穿刺导航路径(7)在超声图像平面上即可进行手术穿刺,此时由于穿刺针(4)处于
超声检查平面上,穿刺针针尖进入超声检查范围时即可在超声图像上实时看到针尖影像,操作医生可按穿刺针中心轴方向推进穿刺针同时通过超声图像针尖影像监察达到穿刺目标。
技术特征:
1.一种基于姿态角超声引导穿刺导航系统,其包含:电脑(或移动智能终端)、基准架(1)、探头姿态角传感器(2)、穿刺针姿态角传感器(3)、穿刺针(4)。2.根据权利要求1所述的基准架(1),其特征是:基准架(1)基底面与探头侧面下缘外形吻合;基准架(1)固定于超声探头(5)上;基准架(1)正面具有可供穿刺针固定(或贴靠)的穿刺针卡位(12);基准架(1)的形态可以是长方形,也可以是其它形态;基准架(1)的数量可以是一个,也可以是探头两侧各一个。3.根据权利要求1所述的探头姿态角传感器(2),其特征是:探头姿态角传感器(2)固定于超声探头(5)上。4.根据权利要求1所述的穿刺针姿态角传感器(3),其特征是:穿刺针姿态角传感器(3)固定于穿刺针(4)上。5.根据权利要求1所述的穿刺针(4),其特征是:穿刺针固定(或贴靠)于基准架穿刺针卡位(12)上,穿刺针(4)中轴线与超声探头(5)形成一个以基准架穿刺针卡位为中心的各个方向可以偏转的关节。6.一种基于姿态角超声引导穿刺导航方法,其包含:a)将基准架(1)固定于超声探头上,将穿刺针(4)固定(或贴靠)于基准架(1)穿刺针卡位上;b)获取实时超声图像及图像分辨率信息,并将超声图像实时传输到电脑(或移动智能终端)并显示;c)通过探头姿态角传感器(2)动态获取超声探头姿态角参数,通过穿刺针姿态角传感器(3)动态获取穿刺针姿态角参数,以基准架穿刺针卡位中心点为顶点计算穿刺针中轴线相对于超声探头基准轴线的动态空间偏转角度值;d)在超声图像上,以虚拟超声探头基准轴线(11)为中心线,以虚拟基准架穿刺针卡位(8)为中心点,将穿刺导航路径(7)按c)中计算的动态空间偏转角度值动态显示在屏幕上。e)在超声图像上找到需要穿刺的目标,调整穿刺针(4)方向,使穿刺导航路径通过穿刺目标且穿刺导航路径在超声图像平面上,操作医生按穿刺针中心轴方向推进穿刺针同时通过超声图像针尖影像监察达到穿刺目标。
技术总结
本发明提供一种基于姿态角超声引导穿刺导航系统及方法,其硬件设备包含:电脑(或移动智能终端)、基准架(1)、探头姿态角传感器(2)、穿刺针姿态角传感器(3)、穿刺针(4);其利用使医生可以在超声图像上看到预穿刺路径,从而达到有的放矢的特点,对病灶穿刺的实时精准把控,从而大大提高穿刺成功率,缩短病人手术时间,减少创口感染几率,减轻病人痛苦,也降低了手术对医生的技能要求,同时本发明适用于普通超声诊断仪,新增硬件价格低廉,使更多的基层医院能开展此类手术,提高了社会资源的利用率,有益于“看病难”问题的解决。问题的解决。问题的解决。
技术研发人员:孙建松
受保护的技术使用者:孙建松
技术研发日:2020.05.07
技术公布日:2021/11/9
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1