X射线透视摄影装置及X射线透视摄影系统的制作方法
本发明涉及进行被检体的透视摄影的x射线透视摄影装置,特别涉及适合介入放射学(inter-ventionalradiology:ivr)的x射线透视摄影装置。
背景技术:
近年来,在一边对被检体进行x射线透视一边进行手术的ivr中,x射线透视摄影装置被广泛用于内窥镜逆行胆管胰管造影(endoscopicretrogradecholangiopancreatography:ercp)和内窥镜乳头括约肌切开术(endoscopicsphincterotomy:est)。
在使用内窥镜的ivr中,由于一边使内窥镜在被检体中移动来确认其位置一边进行手术,因此期望具有在透视摄影中能够变更x射线对被检体的照射位置(拍摄位置)的结构的x射线透视摄影装置。
作为能够在透视摄影中变更拍摄位置的x射线透视摄影装置的一例,在专利文献1、2中公开了如下的x射线透视摄影装置,具备:支架部,载置于地面;支撑臂部,从支架部的一个侧面突出;顶板,将支撑臂部的突出方向设为短边方向,将与该方向正交的方向设为长边方向;支撑框,被支撑臂部支撑而支撑顶板;x射线产生器,向顶板上照射x射线;支柱部,由支撑框支撑并支撑x射线产生器;以及x射线检测器,配置在支撑框内并检测透过了被检体的x射线。
在专利文献1所公开的x射线透视摄影装置中,使顶板连同支撑框在顶板的短边方向或长边方向上滑动,或者使x射线产生器和x射线检测器以与该短边方向平行的轴为中心旋转,并且能够改变被检体的透视摄影位置。
另外,在专利文献2所公开的x射线透视摄影装置中,支柱部具有:基底部,被支撑为能够相对于支撑框在长边方向上滑动;支柱主体,被固定在基底部的上部;以及连结部,在支柱主体的上端支撑x射线产生器,基底部具有能够使支柱部及x射线产生器在顶板的短边方向上移动的滑动机构。
[现有技术文献]
[专利文献]
[专利文献1]日本特开平11-137540号公报
[专利文献2]日本特开2008-136797号公报。
技术实现要素:
[发明要解决的问题]
但是,在专利文献1记载的x射线透视摄影装置中,在透视摄影中想要沿着支撑臂部的突出方向改变x射线的照射位置的情况下,需要使顶板移动(滑动),有可能对顶板上的被检体施加负荷。特别是在进行ivr的情况下,一边使被检体自身移动一边进行手术,对手术者和被检体来说负荷都变大。
另一方面,也可以考虑使x射线产生器相对于支柱部移动,但是x射线产生器在其内部具备x射线管或光圈叶片等,变得非常重。因此,在以往的x射线透视摄影装置仅使x射线产生器相对于支柱部的支撑位置滑动或旋转的结构中,在x射线产生器移动时装置姿势有可能变得不稳定。特别是在使x射线产生器向顶板的短边方向移动时,使非常重的结构的x射线产生器向离开固定在地面上的支架部的方向移动本身是困难的。
另外,如专利文献2记载的x射线透视摄影装置那样,承担使支柱部支撑于支撑框的作用的基底部自身具有使x射线产生器沿顶板的短边方向移动的滑动机构的情况下,需要在支架部与支撑框之间较大地确保用于使支柱部在短边方向上滑动的空间。
本发明的目的在于提供一种x射线透视摄影装置,能够在透视摄影中在将被检体载置在顶板上的状态下,不使顶板移动而稳定地进行x射线透视摄影,无需较大地确保顶板与支架部之间的空间。
[用于解决问题的手段]
本发明的x射线透视摄影装置具备:支架部,其载置在地面;支撑臂部,其向支架部的一侧面侧突出;顶板,其以支撑臂部的突出方向为短边方向,以与该短边方向正交的方向为长边方向,载置被检体;支撑框,其被支撑臂部支撑,支撑顶板;x射线产生器,其向顶板上照射x射线;以及支柱部,其被支撑框支撑,并在上部支撑x射线产生器,支撑框具有转动机构,转动机构能够以与短边方向平行的轴为中心使支柱部相对于支撑框转动,支柱部具有:基底部,其由转动机构支撑;支柱主体,其配置在基底部的上部;以及滑动机构,其能够使x射线产生器沿着短边方向移动。滑动机构配置在比基底部靠上部。
[发明的效果]
根据本发明,能够不使载置有被检体的顶板移动而稳定地使x射线产生器在短边方向上移动,能够透视被检体的任意位置。另外,本发明的x射线透视摄影装置无需较大地确保顶板与支架部之间的空间,能够使装置整体紧凑。
附图说明
图1是表示x射线透视摄影系统sy的整体结构的从上面观察的图。
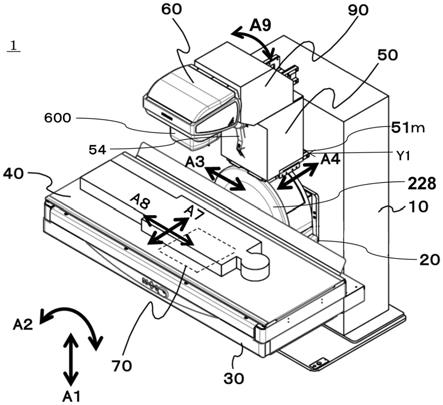
图2是表示x射线透视摄影装置1的结构例的立体图。
图3是表示x射线透视摄影装置1的结构例的框图。
图4是表示x射线透视摄影装置1的各机构的控制系统的结构例的框图。
图5的(a)、(b)是表示x射线透视摄影装置1的动作例的局部侧视图。
图6是表示滑动机构部51m的结构的局部立体图。
图7是表示x射线透视摄影装置1的动作的流程图。
图8的(a)、(b)是表示x射线透视摄影装置1b的动作例的侧视图。
图9是表示滑动机构部52m的结构的局部立体图。
图10的(a)、(b)是说明x射线产生器60的移动前后的位置的侧视图,(a)表示退避时,(b)表示短边方向最大移动时。
图11是表示x射线透视摄影装置1b的各机构的控制系统的结构例的框图。
图12的(a)、(b)是表示x射线透视摄影装置1c的动作例的侧视图。
图13的(a)、(b)是表示转动机构部53m的结构的局部立体图。
图14是表示x射线透视摄影装置1c的控制系统的结构例的框图。
图15的(a)、(b)是表示斜入透视摄影时的x射线检测器70的动作的说明图。
图16的(a)、(b)是表示光圈叶片610a、610b的动作和x射线照射范围的说明图。
图17的(a)、(b)是表示设置在x射线检测器70上的栅格71的作用的说明图。
图中,1···x射线透视摄影装置、2···远程操作台、3···高电压发生器、4···近距离操作台、10···支架部、20···支撑臂部、30···支撑框、40···顶板、50···支柱部、51m、52m···滑动机构部、52···支柱主体、53m···转动机构部、54···压迫筒、60···x射线产生器、70···x射线检测器、80···显示装置、90···管球支撑部、100···摄影室、p···被检体、sy···x射线透视摄影系统。
具体实施方式
以下,使用附图对本发明的一个实施方式进行说明。
首先,对本发明的x射线透视摄影系统sy的整体结构进行说明。
如图1所示,x射线透视摄影系统sy具备x射线透视摄影装置1、向该摄影装置1供给电力的高电压发生器3、显示所拍摄的像的显示装置80、以及对这些设备进行综合操作的远程操作台2、接近操作台4。在这些设备中,x射线透视摄影装置1、高电压发生器3、接近操作台4以及显示装置80配置在进行被检体p的透视摄影的摄影室100中。另外,远程操作台2具备操作部122,该操作部122接受对使x射线透视摄影装置1的各部分动作的机构的指示等摄影技师w1的各种操作,远程操作台2设置在与摄影室100相邻的操作室200中。或者,手术者op1也可以通过在摄影室100内具有同样功能的接近操作台4进行操作,使x射线透视摄影装置1的各部分动作。在该情况下,优选在接近操作台4上具有手术者op1能够通过脚踏板等一边进行手术一边照射x射线的机构。
摄影室100具有能够遮蔽在室内产生的x射线的构造。因此,位于操作室200内的摄影技师w1即使从x射线透视摄影装置1射出x射线也不会被照射。另外,在摄影室100和操作室200之间设置有窗200w,摄影技师w1能够从操作室200监视摄影室100内的状况。该窗200w由含铅玻璃等形成,以能够遮蔽来自摄影室100的x射线。
在该摄影系统sy中,当同时进行被检体p的透视摄影和手术、即进行所谓的ivr等手术时,x射线的强度或照射间隔等x射线条件的输入可以由摄影技师w1在远程操作台2进行,也可以由手术者op1在接近操作台4进行。高电压发生器3根据其x射线条件向x射线透视摄影装置1供给具有脉冲波形的管电流。x射线透视摄影装置1对躺在x射线透视摄影装置1的顶板40上的被检体p间歇性地照射x射线,生成与各x射线对应的被检体p的透视图像,使显示装置80连续地显示透视图像。手术者op1站在被检体p的周围,边看显示装置80上显示的透视图像边进行手术。此时,根据需要使后述的x射线透视摄影装置1的机构动作,对被检体p的任意位置照射x射线来进行透视摄影。
<实施方式1>
接着,对上述x射线透视摄影系统sy所具备的实施方式1的x射线透视摄影装置1的结构进行说明。
[整体结构]
如图2所示,x射线透视摄影装置1包括:支架部10,放置在地面上;支撑臂部20,向支架部10的一侧面侧突出;顶板40,与支撑臂部突出的方向正交地延伸并载置被检体p;支撑框30,被支撑臂部20支撑并从下方支撑顶板40;x射线产生器60,向顶板40上照射x射线;支柱部50,被支撑在支撑框30上;管球支撑部90,在支柱部50的上部连结支柱部50和x射线产生器60;以及x射线检测器70,检测透过了被检体p的x射线。
以下,将支撑臂部20从支架部10突出的方向(被检体p的左右方向)称为顶板40的短边方向,将与顶板40的短边方向正交的方向作为长边方向进行说明。
支架部10在其内部具有升降机构221(以下称为a1升降机构),升降机构221能够使支撑臂部20、支撑框30及由支撑框30支撑的顶板40、支柱部50、x射线产生器60、x射线检测器70及管球支撑部90沿箭头a1方向升降(参照图4)。通过该机构221,能够在维持x射线产生器60与x射线检测器70的距离、即x射线管焦点、显像面间距离(sid)的状态下使支撑框30升降。另外,由于支撑框30是能够升降的结构,因此能够将顶板40的高度调节到容易在顶板40上载置被检体p的位置、或者手术者容易进行作业的位置。
支架部10具有能够以与顶板40的短边方向平行的轴为中心使支撑臂部20转动的(箭头a2)顶板转动机构222(以下,称为a2转动机构)(参照图4)。随着该机构222对支撑臂部20的转动,支撑框30及顶板40能够与支柱部50一起转动。支撑框30的可转动范围优选相对于地面从水平状态起约±90°左右,合计约180°左右。由于支撑臂部20是能够这样旋转的结构,因此能够使顶板40上的被检体p的姿势立起或躺卧等进行变更。
支撑框30在其内部具有滑动机构223(以下称为a3滑动机构),滑动机构223能够使支柱部50相对于支撑臂部20及支撑框30在顶板40的长边方向(箭头a3方向)上移动(参照图4)。
支撑框30还在其内部具有使x射线检测器70沿顶板40的短边方向(箭头a7方向)及长边方向(箭头a8方向)滑动的检测器移动机构(以下称为检测器滑动机构227)(参照图4)。另外,也可以是a3滑动机构223代替检测器移动机构227而能够实施x射线检测器70向长边方向滑动的结构。在这种情况下,a3滑动机构223能够使支柱部50及x射线检测器70一起滑动,而使x射线检测器70的长边方向的位置和x射线产生器60的长边方向的位置始终一致。
支撑框30在支架部10侧具有支柱部转动机构228(以下称为a9转动机构),该支柱部转动机构228能够以与顶板40的短边方向平行的轴为中心使支柱部50转动。该a9转动机构228具有能够使支柱部50沿着在上面具有圆弧的半圆状部件的圆周部转动的结构,该半圆状部件配置成能够通过a3滑动机构223在顶板40的长边方向上滑动。
这些机构221~223、227、228可以是公知的结构,与以往的x射线透视摄影装置所具备的机构相同,因此在此省略详细的说明。
除了上述的5个机构221~223、227、228以外,本实施方式的x射线透视摄影装置1的支柱部50具有短边方向的滑动机构部51m,滑动机构部51m能够使x射线产生器60沿着顶板40的短边方向(箭头a4方向)移动。关于该a4滑动机构部51m的结构的详细情况将在后面进行说明。
x射线产生器60具有从高电压发生器3经由未图示的电缆接受电力供给而产生x射线的x射线管球。从高电压发生器3向x射线产生器60供给电力的电缆优选是不妨碍蛇管或cablebear(注册商标)等装置的各种动作及透视摄影的机构及配置。x射线产生器60也可以具有限制从x射线产生器60发出的x射线的照射范围的x射线可动光圈600(图3)、选择性地透过特定能量的x射线的x射线滤波器等。
x射线检测器70以与x射线产生器60相对的方式配置在支撑框30的内部,能够以从x射线产生器60照射的x射线的光轴始终贯穿x射线检测器70的中心的方式与x射线产生器60的位置连动地移动。x射线检测器70能够使用图像增强器和tv相机的组合或x射线平面检测器(flatpaneldetector:fpd)等。特别是,如果考虑将x射线检测器配置在支撑框内,则优选使用小型、轻量的fpd。
[控制系统的结构]
如图3所示,x射线透视摄影装置1具备:图像处理部116,对从x射线检测器70输出的x射线信号进行图像处理;存储部114,存储由图像处理部116处理后的x射线图像等各种信息;以及装置控制部120,综合控制各构成要素。由图像处理部116处理后的x射线图像经由装置控制部120显示在显示装置80上。
装置控制部120作为搭载在cpu或gpu上的软件来实现其功能。另外,装置控制部120的一部分或全部的功能也可以通过asic(applicationspecificintegratedcircuit,专用集成电路)和fpga(fieldprogramablegatearray,场可编程门阵列)等硬件来实现。
在x射线透视摄影装置1中具备上述的装置控制部120以及用于控制各部分的动作的控制部。具体而言,x射线透视摄影装置1具备:x射线控制部123,进行x射线产生器60、x射线可动光圈600的控制,调整从x射线产生器60射出的x射线量;以及机构控制部124,控制使装置的各部分移动的机构。
装置控制部120与操作部122连接,当接收到操作部122接收到的摄影技师w1或手术者op1的操作信息时,基于该信息向机构控制部124等发送指示。如图4所示,机构控制部124具有:拍摄系统控制部6,调整x射线的照射位置(拍摄位置);以及检测器控制部7,根据拍摄位置调整x射线检测器70的位置。
上述机构,即a1升降机构221、a2转动机构222、a3滑动机构223、a9转动机构228及滑动机构部51m与拍摄系统控制部6连接。拍摄系统控制部6按照操作部122接受的使各部分动作的指示信息控制这些机构的动作,调整拍摄位置。另外,检测器滑动机构227与检测器控制部7连接,与x射线产生器60的位置连动地调整x射线检测器70的位置。
操作部122也可以具备接受装置的移动条件的杆或按钮,或者具有通过数值输入等接受移动条件的键盘或触摸面板等的ui。摄影技师w1或手术者op1通过操作部122输入其移动方向或移动量等移动条件,从而在检测器控制部7的控制下能够控制x射线透视摄影装置1的箭头a1~a4、a7~a9方向的动作。另外,以上说明的控制部的一部分或全部也可以设置在摄影室200内。
[滑动机构部的结构]
接着,参照图5、6对支柱部50的特别是滑动机构部51m的具体结构进行说明。图5表示为了说明而卸下了x射线透视摄影装置1的外装的状态。图6是从图2的箭头y1方向观察滑动机构部51m(即,从支架部10侧观察)的放大图。
x射线透视摄影装置1的支柱部50具备被支柱部转动机构228支撑的基底部51和配置在基底部51的上部的支柱主体52。在支柱主体52的支撑框30侧的侧面设置有在摄影时压迫被检体p的关心区域的压迫筒54。
滑动机构部51m是配置在基底部51的上部(具体而言,基底部51的上端部与支柱主体52的下端部之间)并使支柱主体52相对于基底部51在顶板40的短边方向上滑动的机构。通过滑动机构部51m的驱动,支柱主体52滑动,从而能够配合其移动能够使x射线产生器60滑动。
滑动机构部51m可以采用公知的滑动机构,但是在图示的例子中具有齿条小齿轮机构。具体而言,滑动机构部51m在基底部51侧具备齿条500和直线引导件501的轨道部分。齿条500和直线引导件501的轨道部分与顶板40的短边方向平行地配置,根据齿条500的长度设定x射线产生器60的可动范围。另一方面,滑动机构部51m在支柱主体52侧具备直线引导件501的块部分、驱动用的马达502、驱动用的减速器503以及与齿条500啮合的驱动用小齿轮504。小齿轮504设置在减速器503的输出轴的前端。通过这样的机构,当马达502驱动时,减速器503将马达502的旋转传递给小齿轮504,小齿轮504在与齿条500啮合的状态下移动,支柱主体52能够在顶板40的短边方向(箭头a4方向)上滑动。
[动作]
以下,参照图7等对x射线透视摄影装置1的动作例进行说明。
[步骤s1]
摄影技师w1对操作部122进行操作,使a1升降机构221动作,调整支撑框30的高度,以成为被检体p容易载置在顶板40上的高度。在该时刻,如图5(a)所示,支柱主体52成为接近支架部10而被收纳的状态。
[步骤s2]
在该状态下,手术者op1使被检体p躺在顶板40上。
[步骤s3]
装置控制部120判断操作部122是否被摄影技师w1操作而接受了拍摄位置的变更指示的输入。当操作部122接受到摄影技师w1的输入时,x射线透视摄影装置1的动作流程进入下一步骤s4。
[步骤s4]
摄影系统控制部6根据摄影技师w1输入的拍摄位置控制各机构的动作,使x射线产生器60在顶板40的长边方向及短边方向上移动,并配置在透视摄影的开始位置。在改变x射线产生器60和支撑框30的倾斜度的情况下,在维持x射线产生器60和x射线检测器70的距离(sid)的状态下进行。
[步骤s5]
装置控制部120判断操作部122是否接受了摄影技师w1的透视摄影开始的指示输入。当操作部122接受到透视摄影开始的指示输入时,x射线透视摄影装置1的动作流程进入下一步骤s6。
[步骤s6]
从x射线产生器60以规定的间隔照射x射线,开始透视摄影。此时,根据需要,在由压迫筒54压迫被检体p的关心区域的状态下进行摄影。拍摄到的透视图像显示在显示装置80上,手术者一边看着显示装置80上显示的透视图像一边对被检体p进行手术。
[步骤s7]
装置控制部120判断是否输入了摄影技师w1对操作部122进行操作而使拍摄位置在顶板40的短边方向上移动的指示。
[步骤s8]
拍摄系统控制部6在继续透视摄影的状态下,如图5(b)所示,驱动滑动机构部51m,使x射线产生器60向顶板40的短边方向的被检体p侧(箭头a4)移动。具体而言,拍摄系统控制部6根据装置控制部120接受到的指示对滑动机构部51m发送使马达502旋转以使x射线产生器60以所指示的移动量移动的信号。由此,在小齿轮504与齿条500啮合的状态下移动,x射线产生器60向顶板40的短边方向移动。
检测器滑动机构227与滑动机构部51m连动而使x射线检测器70的位置向相同方向移动。由此,能够将照射的x射线的光轴定位成始终贯穿x射线检测器70的中心。
[步骤s9]
装置控制部120判断摄影技师w1是否操作了操作部122以进行x射线摄影。
[步骤s10]
摄影系统控制部6使滑动机构部51m对x射线产生器60的移动暂时停止,检测器控制部7使检测器滑动机构227对x射线检测器70的移动暂时停止。在这样定位了x射线产生器60的状态下,照射x射线而拍摄x射线图像。x射线图像被显示在显示装置80上。在x射线摄影结束后,再次开始x射线产生器60和x射线检测器70的移动以及透视摄影。
[步骤s11]
装置控制部120判断透视摄影是否结束到摄影技师w1经由操作部122输入的规定位置。
[步骤s12]
透视摄影结束。当摄影技师w1从操作部122输入摄影结束的指示时,x射线产生器60停止x射线的照射。滑动机构部51m的驱动停止,x射线产生器60向顶板40的短边方向的移动停止。
[步骤s13]
拍摄系统控制部6调整支撑框30以成为被检体p容易从顶板40上下降的高度,如图5(a)所示,使支柱主体52返回到最靠近支架部10的状态。
这样,根据实施方式1的x射线透视摄影装置1,进行被检体的透视摄影。另外,在以上的动作中,操作部122的操作由摄影技师w1进行,但与操作部122同样的操作部也设置在接近操作台4上,手术者op1也可以变更x射线产生器60的位置。
如上所述,在实施方式1的x射线透视摄影装置1中,通过滑动机构部51m能够一边使x射线产生器沿着顶板的短边方向移动一边透视被检体的任意位置。因此,在透视摄影中不需要使顶板沿着支撑臂部的突出方向移动,能够减轻被检体的负荷。
特别是在使用x射线透视摄影装置1的ivr中,由于能够在不使被检体自身沿着顶板的短边方向移动的情况下进行手术,因此能够大幅减轻对手术者及被检体的负荷。
在x射线透视摄影装置1中,滑动机构部51m配置在支撑框的支柱部转动机构所支撑的基底部51的上部,由此,不需要为了使支柱部在支架部与顶板之间沿短边方向滑动而确保较大的空间。因此,能够使装置整体紧凑。
另外,x射线透视摄影装置1由于滑动机构部51m能够连同基底部的正上方的支柱主体一起滑动,所以即使是非常重的结构的x射线产生器,也能够稳定地在顶板的短边方向上滑动。
并且,在x射线透视摄影装置1中,由于具有滑动机构部51m的支柱部50在与支撑臂部20不同的位置被支撑框30支撑,因此不需要使支撑框30连同使其滑动或转动的机构一起移动,能够容易地构成向短边方向的移动机构。另外,由此,与连同支撑臂部20一起滑动相比,能够使装置的进深紧凑。
并且,在本实施方式的x射线透视摄影装置1中,由于滑动机构部51m设置在压迫筒54的下部,因此在滑动机构部51m的驱动时,x射线产生器60和压迫筒54连动地动作,能够使压迫筒54对被检体的压迫位置始终与x射线照射范围的中心一致。
<实施方式2>
关于实施方式2的x射线透视摄影装置1b与实施方式1的x射线透视摄影装置1的不同点进行说明。x射线透视摄影装置1b如图8(a)所示,除了滑动机构部51m之外,在连结支柱主体52的上端和管球支撑部90的下端的位置还具备能够使x射线产生器60在顶板40的短边方向(箭头a5方向)上滑动的短边方向滑动机构部52m。
[结构]
以下,参照图8、9对滑动机构部52m的具体结构进行说明。图9是从图8(a)的箭头y2方向观察滑动机构部52m(即,从支撑框30侧观察)的放大图。
滑动机构部52m能够采用公知的滑动机构,但是在图示的例子中具有与滑动机构部51m同样的齿条小齿轮机构。具体而言,滑动机构部52m在支柱主体52侧具备齿条510和直线引导件511的轨道部分。齿条510和直线引导件511的轨道部分与箭头a5方向平行地配置。另一方面,在滑动机构部52m的管球支撑部90侧设置有能够沿着直线引导件511的轨道移动的管球滑动部53,在管球滑动部53上设有直线引导件511的块部分、驱动用的马达512以及驱动用小齿轮513。x射线产生器60相对于管球支撑部90安装在支架部10的相反侧的前端。小齿轮513经由链条及减速器等设置在管球滑动部53的前端。
当马达512旋转时,在齿条510与小齿轮513啮合的状态下,管球滑动部53与管球支撑部90和x射线产生器60一起向箭头a5方向滑动。
在x射线透视摄影装置1b中,x射线产生器60相对于顶板40的短边方向的可动范围是基于两个滑动机构部51m、52m的x射线产生器60的可动范围的合计。在顶板40的短边方向的长度如图10所示为700mm的情况下,例如x射线产生器60通过滑动机构部51m移动200mm,通过滑动机构部52m移动400mm,从而加起来能够移动600mm。由此,能够使x射线的可照射范围(即可拍摄范围)从顶板40的短边方向的一端移动到另一端。
在实施方式2中,如图11所示,拍摄系统控制部6除了a1升降机构221、a2转动机构222、a3滑动机构223、a9转动机构228、滑动机构部51m之外,还与滑动机构部52m连接。另外,检测器移动机构227与基于滑动机构部51m、52m的驱动的x射线产生器60沿着顶板40的短边方向的滑动动作连动地使x射线检测器70移动,调整其位置以使x射线的光轴始终贯穿x射线检测器70的中心。
在实施方式2中,作为操作部122,驱动滑动机构51m的操作部和驱动滑动件52m的操作部可以相同,也可以不同。在驱动滑动机构51m的操作部和驱动滑动件52m的操作部相同的情况下,优选使滑动机构部51m对x射线产生器60的滑动动作优先进行。即,x射线产生器60的大致移动由支柱主体52和支撑其上部的所有较重结构的滑动机构部51m进行,细致的调整优选通过支撑的结构更轻的滑动机构部52m来进行。
[动作]
以下,对实施方式2的x射线透视摄影装置1b的动作例进行说明。x射线透视摄影装置1b的动作与图7所示的x射线透视摄影装置1的动作相同,仅在使x射线产生器60沿顶板40的短边方向移动时的步骤s8不同。以下,对步骤s8的x射线透视摄影装置1b的情况下的动作进行说明。
[步骤s8]
如图8(b)所示,拍摄系统控制部6驱动滑动机构部51m及滑动机构部52m,使x射线产生器60向顶板40的短边方向的被检体p侧(箭头a4、a5)以经由操作部122输入的移动量滑动。
如上所述,在实施方式2的x射线透视摄影装置1b中,在将顶板40的短边方向的尺寸(装置的进深尺寸)抑制为与以往相同程度的状态下,能够在比实施方式1的x射线透视摄影装置1更宽的范围内进行拍摄。
另外,由于滑动机构部52m设置在支柱主体52的上端,因此能够通过使滑动机构部51m、52m双方驱动,滑动机构部51m使支柱部50移动到不与被检体p碰撞的位置,且滑动机构部52m使x射线产生器60的位置移动到顶板40的手术者侧的端部(与支架部10相反侧的端部)而进行摄影。
另外,在顶板40的手术者侧的端部进行摄影时,一般不使用压迫筒。因此,在滑动机构部52m的驱动时,压迫筒54的位置也可以不与x射线产生器60的移动连动。在滑动机构部52m的驱动时想要使用压迫筒54的情况下,通过位置传感器等检测x射线产生器70的位置,判断x射线照射范围的中心与压迫被检体的中心是否一致,仅在一致的情况下构成为允许压迫动作。在它们的中心不一致的情况下,优选将偏移的方向及其偏移量表示在显示装置80及操作部122上。
<实施方式3>
以下,对实施方式3的x射线透视摄影装置1c进行说明。x射线透视摄影装置1c如图12所示,除了滑动机构部51m、52m之外,管球支撑部90还具有能够使x射线产生器60以与顶板40的长边方向平行的轴r为中心转动(箭头a6方向)的转动机构部53m。由此,x射线透视摄影装置1c能够进行短边方向的斜入(以与被检体的体轴平行的轴为中心从斜向对被检体照射x射线)。图13(a)、(b)分别是从上方观察转动机构部53m的图和从下方观察转动机构部53m的图。
以下,对转动机构部53m的具体结构进行说明。
如图13所示,转动机构部53m包括:马达520;主动滑轮521,通过马达520的旋转而旋转;从动滑轮522,与主动滑轮521的旋转连动地旋转;减速器523,将从动滑轮522的旋转方向变换为与主动滑轮521的旋转方向正交;带524,连结滑轮521、522;旋转轴部53s,是与顶板40的长边方向平行的轴;以及齿轮525,与x射线产生器60啮合,以旋转轴部53s为中心转动。
x射线产生器60具有筒状形状,并具有与旋转轴部53s平行的轴r,并且构成为齿轮525的圆弧状部分固定于x射线产生器60的外周,随着齿轮525的旋转而以轴r为中心转动。
具体而言,当马达520旋转时,主动滑轮521旋转,从动滑轮522与该旋转连动地旋转。通过从动滑轮522的旋转,齿轮525以旋转轴部53s为中心旋转。x射线产生器60与齿轮525的转动连动地以轴r为中心向箭头a6方向转动。
在实施方式3中,如图14所示,拍摄系统控制部6除了a1升降机构221、a2转动机构222、a3滑动机构223、a9转动机构228、滑动机构部51m、52m之外,还与转动机构部53m连接。另外,检测器控制部7与滑动机构部51m、52m对支柱部50的滑动、以及转动机构部53m对x射线产生器60的转动连动,根据x射线产生器60的移动距离和转动角度调整x射线检测器70的位置,以使x射线的中心始终与x射线检测器70的中心一致。
以下,对实施方式3的x射线透视摄影装置1c的动作例进行说明。
x射线透视摄影装置1c的动作与图7所示的实施方式1的x射线透视摄影装置1的动作相同,仅使x射线产生器60移动的步骤s8不同,因此,以下对该步骤s8中的动作进行说明。
[步骤s8]
如图12(b)所示,拍摄系统控制部6驱动滑动机构部51m、52m以及转动机构部53m。通过滑动机构部51m、52m使x射线产生器60向顶板40的短边方向的被检体侧(箭头a4、a5)以指示的移动量滑动,通过转动机构部53m使x射线产生器60转动(箭头a6)。由此,x射线相对于被检体p倾斜地照射。
x射线产生器60由于在其内部具备x射线管和光圈叶片等,所以变重。因此,优选按照在通过滑动机构部51m、52m使x射线产生器60向箭头a4、a5方向移动之后,通过转动机构部53m向箭头a6方向转动的顺序进行操作。
若像这样一边使x射线产生器60转动一边进行透视摄影(以下称为斜入透视摄影),则如图15(a)所示,x射线的入射位置偏离x射线检测器70的中心。装置控制部120计算该偏离量,通过检测器滑动机构227使x射线检测器70向a7方向滑动。由此,能够在使x射线入射位置(摄影点)与x射线检测器70的中心一致的状态下进行斜入透视摄影。
另外,如上所述,x射线产生器60是非常重的结构,但是在x射线透视摄影装置1c中,由于转动机构部53m设置在支柱主体52的上端的管球支撑部90上,因此与使x射线产生器60与支柱主体52一起转动来进行斜入透视摄影相比,能够使x射线产生器60稳定地转动。
接着,对伴随斜入而实施的装置控制部120的控制或调整进行说明。装置控制部120进行的控制例如有x射线量的控制、x射线强度的调整、光圈叶片的调整、栅格的调整等。装置控制部120优选在斜入透视摄影时实施其中一个以上。
[x射线量的控制]
首先,对x射线量的控制进行说明。
在斜入透视摄影时,在透视摄影中x射线产生器60与被检体的距离(摄影距离)发生变化。由此,即使射出的x射线量相同,被检体p接受的x射线强度也会发生变化,因此有时在透射图像的每个摄影部位产生浓度不均。装置控制部120通过以下式(1)计算被检体接受的x射线强度。x射线控制部123控制高电压发生器3的输出,以使被检体接受的x射线强度在任何摄影定时都相同。由此,能够进行抑制了图像的浓度不均的透视摄影。
[数1]
x射线强度=(管电压)2×(管电流)×(照射时间)/(摄影距离)2…(1)
在摄影距离的测量方法中,例如可以使用拍摄系统控制部6测量x射线产生器60的斜入角度θ并根据该角度θ随时计算摄影距离的方法、在x射线可动光圈600等上固定距离传感器并通过距离传感器实测摄影距离的方法等。
[图像处理中的x射线强度的调整]
接着,对基于图像处理的x射线强度的调整进行说明。
在斜入透视摄影时,x射线从x射线产生器60以放射状射出,因此即使是在相同定时照射的x射线,其强度也根据每个被检体p的位置而不同。例如如图15(b)所示,在以斜入角度θ进行斜入透视摄影时,在对被检体p入射的x射线的手术者op1侧的端部t1和其相反侧的端部t2,由于各自的摄影距离d1、d2不同,因此x射线强度不同。斜入角度越大,该x射线强度差越大。
装置控制部120针对放射状的x射线相对于被检体的每个入射位置,使用上述式(1)计算被检体接受的x射线强度。图像处理部116通过基于在该定时被检体的各部分接受到的x射线强度对在某定时拍摄到的透视图像进行校正,能够制作没有浓度不均的透视图像。
[光圈叶片的调整]
接着,对光圈叶片的调整进行说明。
在实施方式3中,如图16(a)所示,优选在x射线可动光圈600设置有能够以各自不同的开口宽度独立开闭的多个光圈叶片(以下称为非连动的光圈叶片)610a、610b。由于x射线以放射状射出,因此在斜入透视摄影时,即使在刚射出之后x射线在手术者op1侧和其相反侧扩展为大致相同宽度(l1=l1),有时向x射线检测器70照射时的宽度(图像接收区域)r1、r2的大小也不同(在此,r1<r2)。斜入角度越大,图像接收区域r1、r2的差越大。
因此,当光圈叶片610a、610b连动时,当在检测器70的图像接收区域为最大的情况下射出x射线时,向比x射线检测器70的有感区域宽的范围照射x射线,对被检者及手术者产生不必要的辐射(图16(a))。因此,如图16(b)所示,通过使光圈叶片610a、610b非连动,根据x射线产生器60的转动角度计算两侧的照射区域的差并进行修正,在图像接收区域最大的状态下,能够防止被检者及手术者受到不必要的辐射。在该图中,通过缩小图像接收区域超过x射线检测器70的有感区域的一侧的光圈叶片610b的宽度(即l1>l2),能够防止不必要的辐射。
[调整栅格]
接着,对栅格的调整进行说明。
如图17(a)所示,在x射线检测器70中也可以配置除去散射线的栅格71。作为栅格71,可以使用平行栅格、聚焦栅格、交叉栅格等。在配置了栅格71的情况下,根据射入摄影时的x射线产生器60的转动角度,从x射线产生器60射出的x射线有可能相对于x射线检测器70倾斜地入射而被栅格71除去而未到达x射线检测器70。在栅格71为平行栅格的情况下,在射入摄影时,如图17(b)所示,通过使栅格71或栅格71和x射线检测器70与x射线产生器60的转动角度一致地转动,能够提供不受散射线影响的鲜明的图像。另外,也可以不配置栅格71(无栅格)而进行从摄影后的图像中除去散射线的影响的图像校正处理。
如上所述,根据实施方式3的x射线透视摄影装置1c,由于能够使x射线产生器在顶板的短边方向上移动,而且能够以与短边方向正交的轴r为中心倾斜,因此能够在摄影中不移动被检体地变更x射线的照射位置及照射角度。
例如,即使在被检体的想要拍摄的部位脏器重叠的情况下,也可以像以往那样由医疗从业者使麻醉中的被检体的身体相对于x射线管球倾斜,不需要一边避免脏器重叠一边进行摄影。在x射线透视摄影装置1c中,即使在这样的情况下,也能够不接触被检体地以适当的角度进行x射线透视摄影。
另外,优选x射线产生器60通过控制为x射线不朝向手术者照射的结构、或者x射线不朝向手术者(例如可转动角度±15度),防止手术者不必要的辐射。
上述的实施方式1~3能够在技术上不矛盾的范围内进行组合,并包含在本发明中。例如,滑动机构部52m、转动机构部53m可以分别独立地搭载在x射线透视摄影装置上,也可以搭载滑动机构部51m和转动机构部53m或滑动机构部52m和转动机构部53m。
- 还没有人留言评论。精彩留言会获得点赞!