一种公共服务用导盲机器人的制作方法
[0001]
本发明涉及机器人技术领域,尤其涉及一种公共服务用导盲机器人。
背景技术:
[0002]
全世界有数以千万计的盲人,盲人需要起居、生活、外出办事,帮助盲人提升行动方便性具有重要意义。传统方式盲人借助盲杖、导盲犬出行,由于局限性,不能很好满足导盲需求。
[0003]
为此,现有技术中提供一些导盲机器人,这些机器人能够根据自动的引领盲人行走。但是这些导盲机器人的行走速度一般是固定的,难以很好的适应不同盲人的行走速度。
技术实现要素:
[0004]
为解决上述技术问题,本发明提供一种公共服务用导盲机器人,以解决上述背景技术中提出的问题。
[0005]
本发明一种公共服务用导盲机器人的目的与功效,由以下具体技术手段达成:一种公共服务用导盲机器人,包括底座、子端机器人、伸缩扶手、行走支板、行动轮、环绕装置,所述底座前端设有进出斜板,且在底座中央固定连接有终端机器人,所述终端机器人顶部固定连接有终端显示器,且终端机器人左右两侧固定连接有子端连接杆,所述子端连接杆上延伸设有充电连接头,且充电连接头前端活动连接有子端机器人,所述子端机器人顶部内侧中央开设有充电连接槽,且充电连接槽两端开设有伸缩扶手杆槽,所述伸缩扶手杆槽中嵌入连接有伸缩扶手,所述子端机器人内侧底部开设有行走支板槽,且行走支板槽内嵌入连接有行走支板。
[0006]
进一步的,所述子端机器人内部上半段开设有环绕装置舱,且环绕装置舱内部设有环绕装置,所述子端机器人内部下半段设有装置底板,所述子端机器人顶部外侧两端设有扬声器,且子端机器人正面上部设有子端显示器,所述子端机器人正面下部设有感应雷达且子端机器人左右两侧顶部开设有环绕装置门,所述子端机器人内侧底部开设有底盘调节槽,且底盘调节槽内侧固定连接有多根高度调节板,所述高度调节板上开设有高度限位槽,且高度限位槽内活动连接有调节手柄。
[0007]
进一步的,所述装置底板内部呈空心结构,且早装置底板内部中心固定连接有差速器,所述差速器两端啮合连接有行动轮驱动轴,且行动轮驱动轴的末端固定连接有行动轮,所述装置底板顶部内侧固定连接有驱动电机和蓄电池,且装置底板顶部外侧固定连接有智能处理器,所述装置底板内侧固定连接有调节手柄,且调节手柄延伸出子端机器人外部并限位与高度限位槽中。
[0008]
进一步的,所述环绕装置由多根环绕杆组合而成,且环绕杆之间固定连接有角度调节轴,所述环绕杆内部呈空心结构,且环绕杆内侧固定连接有红外探测仪,所述环绕杆外侧轴承连接有导向轴,且导向轴底部设有螺纹并啮合连接有动力传输杆,所述环绕杆内顶部轴承连接有凸轮轮轴,且凸轮轮轴底部与动力传输杆啮合连接,所述凸轮轮轴底部固定
连接有凸轮,所述环绕杆内部底部固定连接有铃铛支架,且铃铛支架顶部固定连接有铃铛。
[0009]
进一步的,所述伸缩扶手底部设有扶手活动轴,且通过扶手活动轴底部固定在伸缩扶手杆槽底部,所述扶手活动轴顶部固定连接有扶手套杆,且扶手套杆外侧顶部开设有限位杆螺纹口,所述限位杆螺纹口内活动连接有限位杆,且限位杆顶部设有限位杆螺纹,所述扶手套杆顶部开设有扶手副杆开口,且扶手套杆内部套接有扶手伸缩副杆,所述扶手伸缩副杆中开设有多个限位孔,且限位孔内与限位杆活动连接,所述扶手伸缩副杆顶部活动连接有握把,且握把底部开设有握把活动槽。
[0010]
进一步的,所述行走支板顶部设有活动轴,且通过活动轴顶部与行走支板槽顶部固定连接,所述活动轴底部固定连接有伸缩副杆,且伸缩副杆外部套接有伸缩套杆,所述绳索套杆顶部开设有伸缩副杆开口,且伸缩套杆底部固定连接有底活动轴,所述底活动轴底部嵌入连接有支板,且支板底部两侧轴承连接有底轮,所述支板顶部两侧开设有踩踏槽。
[0011]
进一步的,所述行动轮的轮轴与行动轮驱动轴固定连接,且轮轴外部固定连接有五根条幅,所述条幅末端固定连接有分段轮毂,且条幅之间固定连接有复位支撑板,所述复位支撑板与分段轮毂之间固定连接有轮毂复位弹簧,所述分段轮毂上设有多个轮毂调节装置,且分段轮毂在轮毂调节装置两侧开设有触发杆活动槽.
[0012]
进一步的,所述轮毂调节装置固定连接于分段轮毂上,且在分段轮毂中心设有锁定齿轴,所述锁定齿轴上啮合连接有触发杆,且触发杆内部的分段轮毂上固定连接有稳固吸盘,所述触发杆底部固定连接有触发杆底座,且触发杆底座两端顶部与分段轮毂内部之间固定连接有回位弹簧,所述触发杆内壁中开设有单向齿舱,且单向齿舱外侧底部固定连接有单向齿轴,所述单向齿轴上固定连接有单向齿,且单向齿顶部末端固定连接有限位板,所述限位板内侧与单向齿舱外侧之间固定连接有单向齿弹簧。
[0013]
有益效果:
[0014]
(1)通过设有轮毂调节装置,当行动轮与地面接触时将使触发杆向内移动使轮毂调节装置中的锁定齿轴放松,实现行动轮可变换形状的效果。
[0015]
(2)通过设有环绕杆,通过其内侧的红外探测仪能够监测盲人与环绕杆之间的距离,通过智能处理器控制电机的转速,实现自动调节行进速度的效果。
附图说明
[0016]
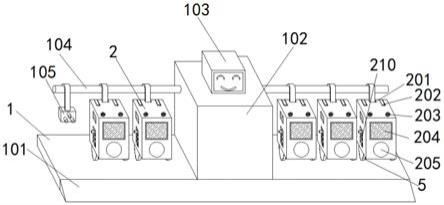
图1为本发明整体结构示意图。
[0017]
图2为本发明子端机器人爆炸结构示意图。
[0018]
图3为本发明子端机器人结构示意图。
[0019]
图4为本发明行走支板结构示意图。
[0020]
图5为本发明行走支板剖面结构示意图。
[0021]
图6为本发明环绕装置剖面结构示意图。
[0022]
图7为本发明伸缩扶手剖面结构示意图。
[0023]
图8为本发明整体正视结构示意图。
[0024]
图9为本发明整体侧视结构示意图。
[0025]
图10为本发明行动轮结构示意图。
[0026]
图11为本发明图10中a处放大结构示意图。
[0027]
图12为本发明图11中b处放大结构示意图。
[0028]
图1-12中,部件名称与附图编号的对应关系为:
[0029]
1-底座、101-进出斜板、102-终端机器人、103-终端显示器、104-子端连接杆、105-充电连接头、2-子端机器人、201-充电连接槽、202-伸缩扶手杆槽、203-扬声器、204-子端显示器、205-感应雷达、206-行走支板槽、207-装置底板、208-行动轮驱动轴、209-差速器、210-底盘调节槽、211-智能处理器、212-驱动电机、213-蓄电池、214-调节手柄、215-环绕装置门、216-环绕装置、217-高度调节板、218-高度限位槽、3-伸缩扶手、301-扶手活动轴、302-扶手套杆、303-扶手伸缩副杆、304-限位孔、305-限位杆螺纹口、306-限位杆、307-限位杆螺纹、308-握把、309-握把活动槽、310-扶手副杆开口、4-行走支板、401-活动轴、402-底轮、403-支板、404-踩踏槽、405-伸缩套杆、406-伸缩副杆、407-伸缩副杆开口、408-底活动轴、5-行动轮、501-分段轮毂、502-轮轴、503-条幅、504-复位支撑板、505-轮毂复位弹簧、506-轮毂调节装置、507-稳固吸盘、508-触发杆、509-触发杆底座、510-回位弹簧、511-锁定齿轴、512-触发杆活动槽、513-单向齿、514-单向齿舱、515-单向齿轴、516-限位板、517-单向齿弹簧、6-环绕装置、601-环绕杆、602-角度调节轴、603-红外探测仪、604-导向轴、605-动力传输杆、606-凸轮轮轴、607-凸轮、608-铃铛支架、609-铃铛。
具体实施方式
[0030]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整的描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例,基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0031]
实施例:
[0032]
如附图1至附图12所示:一种公共服务用导盲机器人,包括底座1、子端机器人2、伸缩扶手3、行走支板4、行动轮5、环绕装置6,其中,底座1前端设有进出斜板101,且在底座1中央固定连接有终端机器人102,终端机器人102顶部固定连接有终端显示器103,且终端机器人102左右两侧固定连接有子端连接杆104,子端连接杆104上延伸设有充电连接头105,且充电连接头105前端活动连接有子端机器人2,子端机器人2顶部内侧中央开设有充电连接槽201,且充电连接槽201两端开设有伸缩扶手杆槽202,伸缩扶手杆槽202中嵌入连接有伸缩扶手3,子端机器人2内侧底部开设有行走支板槽206,且行走支板槽206内嵌入连接有行走支板4。
[0033]
其中,子端机器人2内部上半段开设有环绕装置舱216,且环绕装置舱216内部设有环绕装置6,子端机器人2内部下半段设有装置底板207,子端机器人2顶部外侧两端设有扬声器203,且子端机器人2正面上部设有子端显示器204,子端机器人2正面下部设有感应雷达205且子端机器人2左右两侧顶部开设有环绕装置门215,子端机器人2内侧底部开设有底盘调节槽210,且底盘调节槽210内侧固定连接有多根高度调节板217,高度调节板217上开设有高度限位槽218,且高度限位槽218内活动连接有调节手柄214。可以通过调节手柄214调节装置底板207的高度来适应不同身高的使用需求,同时子端机器人的感应雷达205识别前面的路况并通过扬声器203提醒使用者。
[0034]
其中,装置底板207内部呈空心结构,且早装置底板207内部中心固定连接有差速
器209,差速器209两端啮合连接有行动轮驱动轴208,且行动轮驱动轴208的末端固定连接有行动轮5,装置底板207顶部内侧固定连接有驱动电机212和蓄电池213,且装置底板207顶部外侧固定连接有智能处理器211,装置底板207内侧固定连接有调节手柄214,且调节手柄214延伸出子端机器人2外部并限位与高度限位槽218中。装置底板207承受主要的动力设备及处理设备,通过调节手柄214可以调节行动轮5延伸出子端机器人2的长度适应不同的场地道路。
[0035]
其中,环绕装置6由多根环绕杆601组合而成,且环绕杆601之间固定连接有角度调节轴602,环绕杆601内部呈空心结构,且环绕杆601内侧固定连接有红外探测仪603,环绕杆601外侧轴承连接有导向轴604,且导向轴604底部设有螺纹并啮合连接有动力传输杆605,环绕杆601内顶部轴承连接有凸轮轮轴606,且凸轮轮轴606底部与动力传输杆605啮合连接,凸轮轮轴606底部固定连接有凸轮607,环绕杆601内部底部固定连接有铃铛支架608,且铃铛支架608顶部固定连接有铃铛609。红外探测仪603监测使用者与环绕杆601之间的距离将信号传输至智能处理器211调控子端机器人2的行进速度,当其他行人不慎接触到环绕杆601时将带动导向轴604转动减少摩擦力并使凸轮607转动敲响铃铛608提醒使用者及旁边的行人。
[0036]
其中,伸缩扶手3底部设有扶手活动轴301,且通过扶手活动轴301底部固定在伸缩扶手杆槽202底部,扶手活动轴301顶部固定连接有扶手套杆302,且扶手套杆302外侧顶部开设有限位杆螺纹口305,限位杆螺纹口305内活动连接有限位杆306,且限位杆306顶部设有限位杆螺纹307,扶手套杆302顶部开设有扶手副杆开口310,且扶手套杆302内部套接有扶手伸缩副杆303,扶手伸缩副杆303中开设有多个限位孔304,且限位孔304内与限位杆306活动连接,扶手伸缩副杆303顶部活动连接有握把308,且握把308底部开设有握把活动槽309。根据使用者的身高将扶手伸缩副杆抽出至合适位置并通过限位杆306插入限位孔304中固定。
[0037]
其中,行走支板4顶部设有活动轴401,且通过活动轴401顶部与行走支板槽206顶部固定连接,活动轴401底部固定连接有伸缩副杆406,且伸缩副杆406外部套接有伸缩套杆405,绳索套杆405顶部开设有伸缩副杆开口407,且伸缩套杆405底部固定连接有底活动轴408,底活动轴408底部嵌入连接有支板403,且支板403底部两侧轴承连接有底轮402,支板403顶部两侧开设有踩踏槽404。当需要行动不便的使用者时将行走支板4放下,使用者踩在踩踏槽404中,子端机器人2将使用者带至目的地。
[0038]
其中,行动轮5的轮轴502与行动轮驱动轴208固定连接,且轮轴502外部固定连接有五根条幅503,条幅503末端固定连接有分段轮毂501,且条幅503之间固定连接有复位支撑板504,复位支撑板504与分段轮毂501之间固定连接有轮毂复位弹簧505,分段轮毂501上设有多个轮毂调节装置506,且分段轮毂501在轮毂调节装置506两侧开设有触发杆活动槽512。当分段轮毂501变形后轮毂复位弹簧505将其推至原位。
[0039]
其中,轮毂调节装置506固定连接于分段轮毂501上,且在分段轮毂501中心设有锁定齿轴511,锁定齿轴511上啮合连接有触发杆508,且触发杆508内部的分段轮毂501上固定连接有稳固吸盘507,触发杆508底部固定连接有触发杆底座509,且触发杆底座509两端顶部与分段轮毂501内部之间固定连接有回位弹簧510,触发杆508内壁中开设有单向齿舱514,且单向齿舱514外侧底部固定连接有单向齿轴515,单向齿轴515上固定连接有单向齿
513,且单向齿513顶部末端固定连接有限位板516,限位板516内侧与单向齿舱514外侧之间固定连接有单向齿弹簧517。当轮毂调节装置506接触到地面或者是其他障碍物时,触发杆508将向内移动同时带动锁定齿轴511转动使锁定齿轴511放松,当锁定齿轴511放松时锁定齿轴511两侧的分段轮毂501将可活动调节形状,适应不同地形及防止压伤压坏人员或物品。
[0040]
工作原理:当有盲人需要引导服务时,通过工作人员将所需引导的目的地通过语音或手动输入至终端机器人102中,此时终端机器人102将所需数据通过充电连接头105将数据传输至子端机器人2中。
[0041]
在工作人员的引导下使子端机器人2位于盲人使用者前方,通过调节手柄214将装置207向下移动使行动轮5伸出子端机器人2底部并将调节手柄214限位在高度限位槽218中,根据使用者的身高将扶手伸缩副杆抽出至合适位置并通过限位杆306插入限位孔304中固定,将环绕装置门215打开将内部的环绕装置6取出并然环绕在使用者周围即可让子端机器人2引导使用者到达目的地。
[0042]
当需要行动不便的使用者时将行走支板4放下,使用者踩在踩踏槽404中,此时子端机器人2将使用者带至目的地。
[0043]
在可以自主行走的使用者行进时通过红外探测仪603监测使用者与环绕杆601之间的距离将信号传输至智能处理器211调控子端机器人2的行进速度,当其他行人不慎接触到环绕杆601时将带动导向轴604转动减少摩擦力并使凸轮607转动敲响铃铛608提醒使用者及旁边的行人,当需要上楼梯时,通过行动轮5上的轮毂调节装置506接触到台阶,使轮毂调节装置506上的触发杆508将向内移动同时带动锁定齿轴511转动使锁定齿轴511放松,当锁定齿轴511放松时锁定齿轴511两侧的分段轮毂501将可活动调节形状,适应不同的地形及防止压伤压坏人员或物品,当轮毂调节装置506离开地面或其他地形时轮毂复位弹簧505将分段轮毂501推至原位。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1