连续可变焦点和可变光程的生物测量仪及眼轴测量方法与流程
1.本发明涉及眼球测量设备领域,具体涉及连续可变焦点和可变光程的生物测量仪及眼轴测量方法。
背景技术:
2.眼科生物测量仪是一种能够活体测量眼轴长度、前房深度、晶体厚度的仪器,具有测量精度高、重复性好、非接触性和无损探测等特点。目前已广泛应用于眼科临床工作中。
3.目前的生物测量仪主要是基于短相干光干涉原理设计的(如经典的cn101878410b、cn102551654b),总结其主要工作原理归纳为以下三步:(1)短相干光通过分光棱镜(或其他分光零件如光纤耦合器、分光片等)产生两束同源相干光,两束光分别进入参考臂和样品臂;(2)其中一束进入参考臂,并被反射镜直接反射回分光镜,并进入探测器;(3)另一束则进入样品臂入射眼球,并被角膜前表面、晶体前表面和眼底视网膜等眼球组织反射回分光镜,并进入探测器;(4)通过调节2中参考臂反射镜的位置改变反射束所经过的光程长度,使之与被样品臂反射回来的光进行干涉(只有当二束光的光程相等时干涉探测器才会探测到干涉现象)。通过记录与角膜前表面反射光、晶体前后表面反射光和视网膜前表面反射光干涉时参考臂反射镜的位置,即可获得前房深度、眼轴等生物参数。
4.现有技术存在以下缺点:生物测量仪在样品臂部分,需要收集角膜前表面、晶体前表面和视网膜前表面等反射回来的光使之回到干涉探测器,光束必须聚焦于这些反射界面上才能达到最佳的反射效率,但这几个界面在光轴上处于不同的深度,因此无法使光束同时聚焦在这两个平面上,为了解决这个问题,现有的设计有些通过折中的方式将焦点设计这几个界面之间较为合适的区域;或者将光束分成多束(cn101878410b),每束分别聚焦于这几个界面上;以获得这几个平面综合相对较好的反射效率即探测敏感度,这些方案都一定程度上减少了每个界面的反射效率;人眼的正常眼轴长度约为24mm,但生理病理情况下眼轴长度可波动在15-30mm之间,传统的生物测量仪光路是针对正常眼轴(24mm左右)设计的,其在正常眼轴下的光学效率最高,测量信号最强,但随着眼轴偏离正常范围变大,该光路的光学反射效率由于虚焦等原因会大大下降,甚至在合并屈光介质浑浊(白内障,角膜瘢痕,玻璃体浑浊等)的情况下无法进行测量,现有设计通过增加手动或自动焦点调节光路,通过这些光路对眼内光束的焦点位置进行调整,使光束聚焦在这些眼轴偏离正常范围较大的患者的视网膜上(cn102551654b)以达到增加反射效率的目的;手动调节光路设计或电脑自动调节光路设计增加了系统的复杂程度和成本,且这一过程大大增加的测量的不稳定性和测量时间。
技术实现要素:
5.为了克服背景技术的不足,本发明提供一种探测敏感度高的连续可变焦点和可变光程的生物测量仪。
6.本发明所采用的技术方案:连续可变焦点和可变光程的生物测量仪,其包括光源、
光纤耦合器、参考臂、样品臂、探测器以及主控系统,从光源出来的短相干光源经过光纤耦合器分光后一路进入参考臂,另一路进入样品臂,两路返回的光进入光纤耦合器后发生干涉并进入探测器,在探测器内经过放大、滤波以及解调转化为数字信号,最后传输进主控系统中;所述参考臂包括第二准直镜和反射镜;所述样品臂包括第一准直镜、第一透镜、第二透镜以及二向色镜;所述反射镜与第一透镜可进行同步直线往复运动。
7.所述主控系统连接有用于测量反射镜与第一透镜运动行程的光栅尺。
8.还包括供反射镜与第一透镜安放的移动平台以及驱动所述移动平台直线往复运动的驱动件。
9.所述光纤耦合器与第二准直镜之间设有连接二者的光程补偿光纤。
10.当焦点移动至眼前段角膜前表面时,第一透镜和第二透镜的焦距为f,第一透镜和第二透镜之间的距离为3f,第二透镜和眼球角膜的距离为2f。当焦点移动至眼后端视网膜时,第一透镜和第二透镜的焦距仍为f,但此时第一透镜和第二透镜之间的距离为2f。
11.所述光源与光纤耦合器之间还设有第三准直镜。
12.本发明还提供另一种技术方案,一种眼轴测量方法,其采用如上述的连续可变焦点和可变光程的生物测量仪,其步骤包括:步骤a、测量前首先保证患者固视、生物测量仪与眼睛的距离:患者通过被二向色镜反射的视标图像进行眼睛的固视;测量者通过摄像头对患者的眼睛进行中心对准,并同时通过摄像头的对焦情况调整生物测量仪与患者眼部的距离,仅当生物测量仪与患者眼部距离为2f时摄像头图像最佳,其中,f为第一透镜的焦距;步骤b、生物测量仪中光源发出的短相干光源经过第三准直镜后进入10:90光纤耦合器进行分光;步骤c、其中光纤耦合器射出的探测光进入样品臂中的第一准直镜变为平行光,进过第一透镜和第二透镜后进入受试者眼睛;探测光经过眼内各界面后,各界面的北向反射光沿入射光路返回第一准直镜再次进入光纤耦合器;步骤d、其中光纤耦合器射出的探测光经过光程补偿光纤后进入第二准直镜变为平行光,经过反射镜接反射回第二准直镜再次进入光纤耦合器;步骤e、由步骤c和d中反射回第一准直镜和第二准直镜进入光纤耦合器的光发生干涉,并进入探测器,信号经过放大、滤波、解调以及转化处理后,最终转化成数字信号传输进主控系统;步骤f、测量时主控系统控制驱动件和移动平台运动,使与其相连的第一透镜与反射镜同步平移,第一透镜和第二透镜的相对距离从f改变至3f,此过程中主控系统同步记录光栅尺的实时位置信息和探测器的干涉信息;步骤g、通过主控系统将光栅尺的实时位置信息和探测器的干涉信息在时间轴上同步后进行分析,即可得到眼内各个界面的干涉光程位置,从而获得眼轴长度、前房深度、晶体厚度、角膜厚度等信息。
13.本发明的有益效果是:本技术方案通过连续可变焦点和同步可变光程的样品臂设
计,实现改变参考臂探测光程的同时,同步改变样品臂光线在眼内的焦点位置,使之处于当前探测光程所对应的界面上或附近;具有增加眼内各个结构界面反射效率即探测敏感度的优点。
附图说明
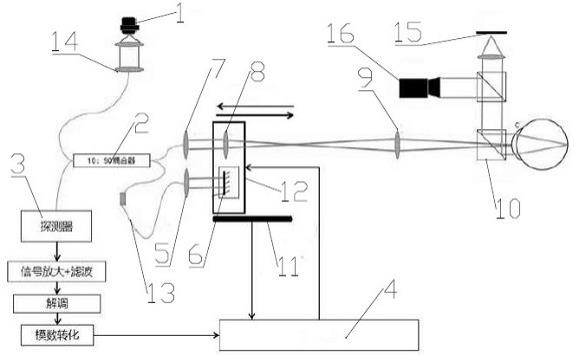
14.图1为本发明实施例连续可变焦点和可变光程的生物测量仪移动至眼前段的结构示意图。
15.图2为连续可变焦点和可变光程的生物测量仪移动至眼后段的结构示意图。
16.图3为测量偏短眼轴时的示意图。
17.图4为测量偏长眼轴时的示意图。
具体实施方式
18.下面结合附图对本发明实施例作进一步说明:如图所示,连续可变焦点和可变光程的生物测量仪,其包括光源1、光纤耦合器2、参考臂、样品臂、探测器3以及主控系统4,从光源1出来的短相干光源经过光纤耦合器2分光后一路进入参考臂,另一路进入样品臂,两路返回的光进入光纤耦合器2后发生干涉并进入探测器3,在探测器3内经过放大、滤波以及解调转化为数字信号,最后传输进主控系统4中;所述参考臂包括第二准直镜5和反射镜6;所述样品臂包括第一准直镜7、第一透镜8、第二透镜9以及二向色镜10;所述反射镜6与第一透镜8可进行同步直线往复运动,本技术方案通过连续可变焦点和同步可变光程的样品臂设计,实现改变参考臂探测光程的同时,同步改变样品臂光线在眼内的焦点位置,使之处于当前探测光程所对应的界面上或附近;具有增加眼内各个结构界面反射效率即探测敏感度的优点。
19.探测器主要由雪崩光电二极管及其附属iv转化电路组成,信号经过放大、滤波、解调等一系列处理后,最终进入模数转化模块被转化成数字信号传输进主控系统。
20.所述主控系统4连接有用于测量反射镜6与第一透镜8运动行程的光栅尺11。
21.还包括供反射镜6与第一透镜8安放的移动平台12以及驱动所述移动平台12直线往复运动的驱动件。
22.所述光纤耦合器2与第二准直镜5之间设有连接二者的光程补偿光纤13。
23.当焦点移动至眼前段角膜前表面时,第一透镜8和第二透镜9的焦距为f,第一透镜8和第二透镜9之间的距离为3f,第二透镜9和眼球角膜的距离为2f,如图1所示。当焦点移动至眼后端视网膜时,第一透镜8和第二透镜9的焦距仍为f,但此时第一透镜8和第二透镜9之间的距离为2f,如图2所示。
24.所述光源1与光纤耦合器2之间还设有第三准直镜14。
25.一种眼轴测量方法,其采用如上述的连续可变焦点和可变光程的生物测量仪,其步骤包括:步骤a、测量前首先保证患者固视、生物测量仪与眼睛的距离:患者通过被二向色镜10反射的视标图像15进行眼睛的固视;测量者通过摄像头16对患者的眼睛进行中心对准,并同时通过摄像头的对焦情况调整生物测量仪与患者眼部的距离,仅当生物测量仪与患者眼
部距离为2f时摄像头图像最佳,其中,f为第一透镜8的焦距;步骤b、生物测量仪中光源1发出的短相干光源经过第三准直镜14后进入10:90光纤耦合器2进行分光;步骤c、其中光纤耦合器2射出的探测光进入样品臂中的第一准直镜7变为平行光,进过第一透镜8和第二透镜9后进入受试者眼睛;探测光经过眼内各界面后,各界面的北向反射光沿入射光路返回第一准直镜7再次进入光纤耦合器2;步骤d、其中光纤耦合器2射出的探测光经过光程补偿光纤13后进入第二准直镜5变为平行光,经过反射镜6接反射回第二准直镜5再次进入光纤耦合器2;步骤e、由步骤c和d中反射回第一准直镜7和第二准直镜5进入光纤耦合器2的光发生干涉,并进入探测器3,信号经过放大、滤波、解调以及转化处理后,最终转化成数字信号传输进主控系统4;步骤f、测量时主控系统4控制驱动件和移动平台12运动,使与其相连的第一透镜8与反射镜6同步平移,第一透镜8和第二透镜9的相对距离从f改变至3f,此过程中主控系统4同步记录光栅尺11的实时位置信息和探测器3的干涉信息;步骤g、通过主控系统4将光栅尺11的实时位置信息和探测器3的干涉信息在时间轴上同步后进行分析,即可得到眼内各个界面的干涉光程位置,从而获得眼轴长度、前房深度、晶体厚度、角膜厚度等信息。
26.本技术方案中中样品臂中第一透镜和第二透镜的屈光力d和设计位置满足以下三点设计要求即可做到探测焦点与干涉光程的连续同步联动(f=1/d):(1)a、b的屈光力等于正视眼等效屈光力,焦距为f;(2)移动至眼前段角膜前表面时第一透镜距离第二透镜等于3f,第二透镜与角膜的距离为2f;(3)移动至眼后端视网膜时第一透镜距离第二透镜等于2f,第二透镜与角膜的距离为2f。
27.当移动平台移动至如图1位置时,在样品臂部分,第一透镜和第二透镜的焦距为f,第一透镜和第二透镜之间的距离为3f,第二透镜和角膜的距离为2f,此时平行光从第一准直镜射出,经第一透镜、第二透镜之后正好聚焦在角膜处,光束被角膜反射回耦合器(探测光聚焦在反射界面上,此时反射效率最高);在参考臂部分,第二准直镜射出的平行光直接被平面镜反射回耦合器,参考臂和样品臂之间的光程差被光程补偿光纤补偿,因此两臂的光程相等,探测器能探测到角膜前表面的干涉信号。
28.同理,当移动平台移动至图2位置时,第一透镜、第二透镜的焦距仍为f,但此时第一透镜和第二透镜之间的距离为2f,从第一准直镜射出的光经第一透镜、第二透镜和眼球的等效屈光面c后正好聚焦在眼底视网膜上(探测光聚焦在反射界面上,此时反射效率最高),在参考臂部分,由于反射镜此时也同步运动了距离f,因此此时两臂的光程仍相等,探测器探测到视网膜表面的干涉信号。
29.被测量眼的眼轴偏离正常范围较大有以下两种情况:当被测量眼小于正常眼轴24mm时(如图3):发生干涉时参考臂光程应位于实线处,此时第一透镜、第二透镜的距离处于2f-3f之间,而第二透镜与眼球等效屈光面的距离不变,计算可知到达等效屈光面处的光束为汇聚光束,经过等效屈光面的聚焦后其焦点必然落于正
常眼轴焦点之前(且在轴性远视的情况下,仅改变眼轴而眼球等效屈光面的屈光力改变较少,计算可得此时焦点仍落于视网膜界面上);当被测量眼大于24mm(正常眼轴)时(如图4):发生干涉时参考臂光程应位于实线处,此时第一透镜、第二透镜的距离处于小于2f,而第二透镜与眼球等效屈光面c的距离不变,计算可知到达等效屈光面处的光束为发散光束,经过等效屈光面的聚焦后其焦点必然落于正常眼轴焦点之后(且在轴性近视的情况下,仅改变眼轴而眼球等效屈光面等效屈光面的屈光力改变较少,计算可得此时焦点仍落于视网膜界面上)。
30.在本发明的描述中,需要说明的是,术语“中心”、“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性。
31.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。此外,在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上。
32.各位技术人员须知:虽然本发明已按照上述具体实施方式做了描述,但是本发明的发明思想并不仅限于此发明,任何运用本发明思想的改装,都将纳入本专利专利权保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1