一种用于术后康复锻炼的助行系统及使用方法与流程
1.本发明涉及医疗护理技术领域,具体为一种用于术后康复锻炼的助行系统及使用方法。
背景技术:
2.手术是一种较大的应激性刺激,通常手术后,机体会出现一系列的对抗反应、炎症细胞功能增强、血小板聚集增多,容易导致静脉血栓,此外,由于术后患者需要被长时间限制于病床,下肢在久卧病床过程中,血液淤滞容易导致患者血管内形成血栓,缺乏活动容易导致肌肉萎缩,并且关节经久不活动容易导致屈伸受限。
3.因此,为了防止上述现象的发生,患者在术后,需要进行适当强度的锻炼,加快身体的恢复速度,现有针对上述锻炼的器材,安全防护有所欠缺,而且患者的锻炼强度无法进行相应的调节,反而会因为锻炼强度过高而起到相反的作用,为此,本领域的技术人员提出了一种用于术后康复锻炼的助行系统及使用方法。
技术实现要素:
4.针对现有技术的不足,本发明提供了一种用于术后康复锻炼的助行系统及使用方法,解决了现有针对上述锻炼的器材,安全防护有所欠缺,而且患者的锻炼强度无法进行相应的调节,反而会因为锻炼强度过高而起到相反的作用的问题。
5.为实现以上目的,本发明通过以下技术方案予以实现:一种用于术后康复锻炼的助行系统,包括锻炼平台,在所述锻炼平台的顶端分别固定安装有若干根等距离设置的栏杆,若干根所述栏杆均分为两组,每组中的若干根栏杆的顶端共同固定连接有一根各部分弯曲度均不相同的扶手杆,在所述锻炼平台顶端的边缘以及其中一端共同固定安装有电动辅助单元,在所述电动辅助单元的上方滑动连接有一组肢体辅助支撑单元;
6.所述电动辅助单元包括固定安装在锻炼平台其中一端的设备安装箱,在所述设备安装箱的内部固定连接有电机安装箱,在所述电机安装箱的内部固定安装有伺服电机,在所述伺服电机的驱动端上固定安装有主动带轮,在所述设备安装箱的内部分别转动连接有第一从动带轮和皮带过渡带轮,且在设备安装箱内部顶端的两个拐角分别对应转动连接有第二从动带轮和第三同步带轮;
7.所述电动辅助单元还包括对称安装在锻炼平台顶端边缘的第一导向滑轨、第二导向滑轨,在所述第一导向滑轨和第二导向滑轨的内部分别对应转动连接有第一丝杠和第二丝杠,在所述第一丝杠和第二丝杠的外部均通过螺纹转动连接有一个滑座,两个所述滑座分别对应延伸至第一导向滑轨、第二导向滑轨的上方,并且与肢体辅助支撑单元的底端连接在一起;
8.所述肢体辅助支撑单元包括长度可同步调节的第一调节机构和第二调节机构,所述第一调节机构和第二调节机构的底端分别对应与两个滑座铰接在一起,且第一调节机构和第二调节机构的顶端分别对应铰接有腰部第一支撑机构和腰部第二支撑机构,在所述腰
部第一支撑机构的侧向端面固定安装有面板调节支架,在所述面板调节支架的顶端固定安装有触控面板;
9.所述第一调节机构包括一根伸缩杆,在所述伸缩杆伸缩区段的外部固定套接有第一衔接块,且在伸缩杆非伸缩段的外部固定套接有第二衔接块,所述第一衔接块和第二衔接块两者之间共同固定连接有一根电动伸缩杆;
10.所述腰部第一支撑机构包括与第一调节机构顶端连接在一起的支撑护板,在所述支撑护板的内侧端面固定连接有调节气囊,且在支撑护板的外侧端面固定连接有设备盒,在所述设备盒的内部分别固定安装有微型气泵i和微型气泵ii,在所述调节气囊的内侧端面固定安装有压力传感器。
11.进一步的,在所述锻炼平台底端的前、后两侧分别固定安装有若干个支撑底脚;
12.在所述锻炼平台的另外一端通过挂钩挂接的方式活动连接有一个用于轮椅上、下的衔接基块;
13.在两根所述扶手杆的外部均固定套接有橡胶材质的防滑套。
14.进一步的,在所述设备安装箱的外侧端面通过螺栓固定安装有一块尺寸相适配的防护板,在所述防护板的内部嵌入安装有一块玻璃视窗;
15.在所述设备安装箱的内部还分别固定安装有用于传递无线信号的无线网关以及用于控制各个用电器启闭的控制器。
16.进一步的,所述主动带轮、第一从动带轮以及皮带过渡带轮三者同处在一条竖直直线上,所述主动带轮与第一从动带轮之间通过第一同步带形成动力传输结构;
17.所述皮带过渡带轮、第二从动带轮以及第三同步带轮三者同处在一条水平直线上,所述第一从动带轮、皮带过渡带轮、第二从动带轮以及第三同步带轮四者之间通过第二同步带形成动力传输结构。
18.进一步的,所述第一丝杠和第二丝杠的一端分别对应从第一导向滑轨、第二导向滑轨的内部延伸出来,并且各自对应与第二从动带轮、第三同步带轮固定连接在一起;
19.所述第一丝杠、第二丝杠与对应位置的滑座之间均通过丝筒形成转动连接结构。
20.进一步的,所述第一调节机构和第二调节机构之间、腰部第一支撑机构和腰部第二支撑机构之间均为结构相同的构件;
21.所述腰部第一支撑机构和腰部第二支撑机构共同拼接成一个圆环形状的支撑结构,且腰部第一支撑机构和腰部第二支撑机构的两端均为斜面,且互补。
22.进一步的,所述伸缩杆的底端、顶端分别与滑座、支撑护板之间对应通过第一铰接座、第二铰接座形成转动连接结构;
23.所述电动伸缩杆的伸缩端与伸缩杆的伸缩端同向设置。
24.进一步的,所述微型气泵i的抽气口、微型气泵ii的出气口均延伸至设备盒的外部,且微型气泵i的出气口、微型气泵ii的抽气口均贯穿支撑护板的内部,并最终均与调节气囊连通在一起。
25.进一步的,所述肢体辅助支撑单元还包括集成在触控面板内部用于传输指令信号的wifi模块;
26.所述电动辅助单元还包括与伺服电机信号控制端串接在一起,且用于调节伺服电机转速的伺服变频器。
27.本发明还提供了一种使用方法,该方法应用于所述的用于术后康复锻炼的助行系统,包括如下步骤:
28.s1、术后患者登上所述的助行系统,并佩戴所述的肢体辅助支撑单元,患者的双手扶持在所述的扶手杆上;
29.s2、患者根据实际需求,使用所述的触控面板,控制所述调节气囊的体积,用以实现所述调节气囊最优化的对患者腰部的支撑;
30.s3、患者再次使用所述的触控面板,启动所述电动辅助单元,并调节所述电动辅助单元对所述肢体辅助支撑单元的牵引速度,所述牵引速度满足患者的锻炼强度即可;
31.s4、患者在所述电动辅助单元和肢体辅助支撑单元的作用下,开始进行正向的行走锻炼;
32.s5、患者行走锻炼至所述助行系统的另一端,再次使用所述的触控面板,调节所述肢体辅助支撑单元的移动方向,让患者缓慢后退,往复操作即可。
33.有益效果
34.本发明提供了一种用于术后康复锻炼的助行系统及使用方法。与现有技术相比具备以下有益效果:
35.1、一种用于术后康复锻炼的助行系统及使用方法,在电动辅助单元的上方滑动连接有一组肢体辅助支撑单元,该肢体辅助支撑单元在实际使用时,针对身体较为相对虚弱的术后患者,在锻炼过程中,对其身躯加以辅助性的支撑,充分确保术后患者在锻炼过程中的安全性,从而防止安全事故的发生。
36.2、一种用于术后康复锻炼的助行系统及使用方法,在锻炼平台顶端的边缘以及其中一端共同固定安装有电动辅助单元,该电动辅助单元,在实际使用时,不仅可以为肢体辅助支撑单元提供作用力,让肢体辅助支撑单元沿着导轨滑动,而且还可以根据患者的实际情况,让术后患者自己调节肢体辅助支撑单元的移动速度,防止速度过快,患者跟不上所导致的锻炼强度过大的问题。
37.3、一种用于术后康复锻炼的助行系统及使用方法,在锻炼平台的顶端分别固定安装有若干根等距离设置的栏杆,若干根栏杆均分为两组,每组中的若干根栏杆的顶端共同固定连接有一根各部分弯曲度均不相同的扶手杆,上述结构,在实际使用时,在患者跟随肢体辅助支撑单元行走锻炼时,患者的双手可以放在扶手杆,扶手杆整体高低起伏,有助于患者肩部、肘部以及手臂的伸展。
38.4、一种用于术后康复锻炼的助行系统及使用方法,在肢体辅助支撑单元中,设置有气囊结构,在使用时,患者可以根据实际的体感,调节气囊中气体的量,从而调节气囊的体积,让气囊更加有力的对患者的腰部进行支撑,且适用于不同身材的患者,具有较强的实用性。
附图说明
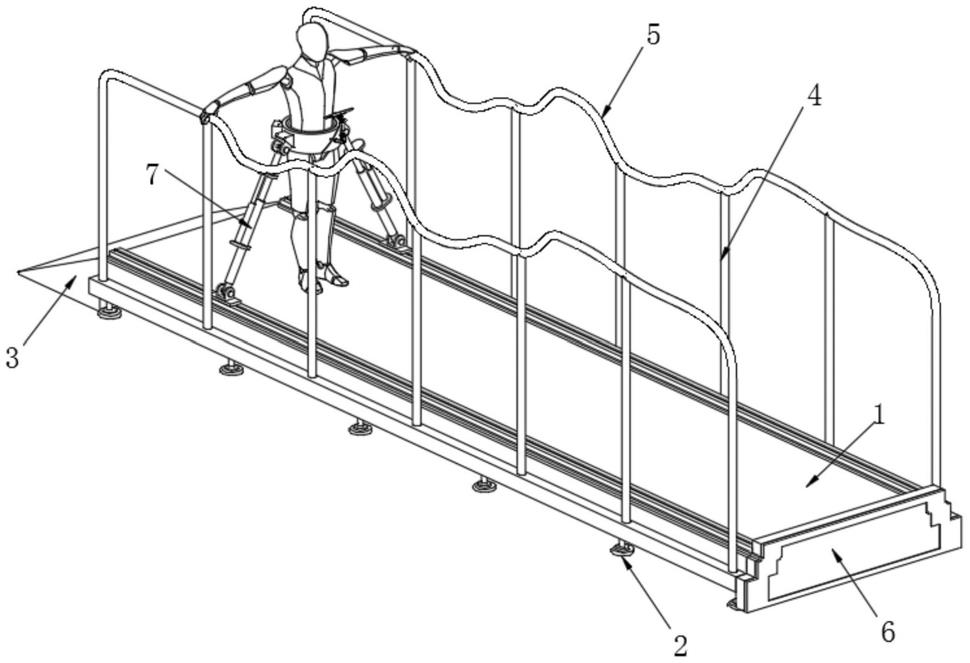
39.图1为本发明的装配结构示意图;
40.图2为本发明的分解结构示意图;
41.图3为本发明电动辅助单元的分解结构示意图;
42.图4为本发明设备安装箱内部结构的侧视图;
43.图5为本发明肢体辅助支撑单元在第一视角下的结构示意图;
44.图6为本发明肢体辅助支撑单元在第二视角下的结构示意图;
45.图7为本发明第一调节机构的结构示意图;
46.图8为本发明腰部第一支撑机构在第一视角下的结构示意图;
47.图9为本发明腰部第一支撑机构在第二视角下的结构示意图;
48.图10为本发明智能调节的结构原理框图。
49.图中:1、锻炼平台;2、支撑底脚;3、衔接基块;4、栏杆;5、扶手杆;6、电动辅助单元;61、设备安装箱;62、电机安装箱;63、防护板;64、玻璃视窗;65、无线网关;66、控制器;67、伺服电机;68、主动带轮;69、第一从动带轮;610、皮带过渡带轮;611、第一同步带;612、第二从动带轮;613、第三同步带轮;614、第二同步带;615、第一导向滑轨;616、第二导向滑轨;617、第一丝杠;618、第二丝杠;619、丝筒;620、滑座;621、伺服变频器;7、肢体辅助支撑单元;71、第一调节机构;711、伸缩杆;712、第一衔接块;713、第二衔接块;714、电动伸缩杆;715、第一铰接座;716、第二铰接座;72、第二调节机构;73、腰部第一支撑机构;731、支撑护板;732、调节气囊;733、设备盒;734、微型气泵i;735、微型气泵ii;736、压力传感器;74、腰部第二支撑机构;75、面板调节支架;76、触控面板;761、wifi模块。
具体实施方式
50.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
51.请参阅图1-2,本发明提供一种技术方案:一种用于术后康复锻炼的助行系统,包括锻炼平台1,在锻炼平台1的顶端分别固定安装有若干根等距离设置的栏杆4,若干根栏杆4均分为两组,每组中的若干根栏杆4的顶端共同固定连接有一根各部分弯曲度均不相同的扶手杆5,在患者跟随肢体辅助支撑单元7行走锻炼时,患者的双手可以放在扶手杆5,扶手杆5整体高低起伏,有助于患者肩部、肘部以及手臂的伸展,在锻炼平台1顶端的边缘以及其中一端共同固定安装有电动辅助单元6,在电动辅助单元6的上方滑动连接有一组肢体辅助支撑单元7,在锻炼平台1底端的前、后两侧分别固定安装有若干个支撑底脚2,考虑到患者处于手术恢复期,患者在锻炼前需要搭乘轮椅,于是我们在锻炼平台1的另外一端通过挂钩挂接的方式活动连接有一个用于轮椅上、下的衔接基块3,考虑到患者在行走过程中,扶手较为光滑,我们在两根扶手杆5的外部均固定套接有橡胶材质的防滑套。
52.请参阅图3-4,电动辅助单元6包括固定安装在锻炼平台1其中一端的设备安装箱61,在设备安装箱61的内部固定连接有电机安装箱62,在设备安装箱61的外侧端面通过螺栓固定安装有一块尺寸相适配的防护板63,在防护板63的内部嵌入安装有一块玻璃视窗64,防护板63的设置,一方面便于设备安装箱61内部的检修,另一方面还可起到防护作用,而玻璃视窗64可以让工作人员观察设备安装箱61中,各个构件之间的工作状态,在设备安装箱61的内部还分别固定安装有用于传递无线信号的无线网关65以及用于控制各个用电器启闭的控制器66,在电机安装箱62的内部固定安装有伺服电机67,在伺服电机67的驱动端上固定安装有主动带轮68,在设备安装箱61的内部分别转动连接有第一从动带轮69和皮
带过渡带轮610,且在设备安装箱61内部顶端的两个拐角分别对应转动连接有第二从动带轮612和第三同步带轮613,主动带轮68、第一从动带轮69以及皮带过渡带轮610三者同处在一条竖直直线上,主动带轮68与第一从动带轮69之间通过第一同步带611形成动力传输结构,皮带过渡带轮610、第二从动带轮612以及第三同步带轮613三者同处在一条水平直线上,第一从动带轮69、皮带过渡带轮610、第二从动带轮612以及第三同步带轮613四者之间通过第二同步带614形成动力传输结构,电动辅助单元6还包括对称安装在锻炼平台1顶端边缘的第一导向滑轨615、第二导向滑轨616,在第一导向滑轨615和第二导向滑轨616的内部分别对应转动连接有第一丝杠617和第二丝杠618,第一丝杠617和第二丝杠618的一端分别对应从第一导向滑轨615、第二导向滑轨616的内部延伸出来,并且各自对应与第二从动带轮612、第三同步带轮613固定连接在一起,在第一丝杠617和第二丝杠618的外部均通过螺纹转动连接有一个滑座620,第一丝杠617、第二丝杠618与对应位置的滑座620之间均通过丝筒619形成转动连接结构,两个滑座620分别对应延伸至第一导向滑轨615、第二导向滑轨616的上方,并且与肢体辅助支撑单元7的底端连接在一起,电动辅助单元6还包括与伺服电机67信号控制端串接在一起,且用于调节伺服电机67转速的伺服变频器621。
53.电动辅助单元6在实际使用时,启动伺服电机67,伺服电机67带动主动带轮68旋转,在第一同步带611的作用下,第一从动带轮69跟随同步旋转,另外又在第二同步带614的作用下,第一从动带轮69、皮带过渡带轮610、第二从动带轮612以及第三同步带轮613同步转动,第二从动带轮612以及第三同步带轮613分别对应带动第一丝杠617和第二丝杠618转动,在丝筒619的作用下,让两个滑座620分别沿着第一导向滑轨615、第二导向滑轨616的方向移动,进而带动整个肢体辅助支撑单元7移动,同理也可反向移动。
54.请参阅图5-6,肢体辅助支撑单元7包括长度可同步调节的第一调节机构71和第二调节机构72,第一调节机构71和第二调节机构72的底端分别对应与两个滑座620铰接在一起,且第一调节机构71和第二调节机构72的顶端分别对应铰接有腰部第一支撑机构73和腰部第二支撑机构74,在腰部第一支撑机构73的侧向端面固定安装有面板调节支架75,在面板调节支架75的顶端固定安装有触控面板76,第一调节机构71和第二调节机构72之间、腰部第一支撑机构73和腰部第二支撑机构74之间均为结构相同的构件,腰部第一支撑机构73和腰部第二支撑机构74共同拼接成一个圆环形状的支撑结构,且腰部第一支撑机构73和腰部第二支撑机构74的两端均为斜面,且互补,肢体辅助支撑单元7还包括集成在触控面板76内部用于传输指令信号的wifi模块761。
55.肢体辅助支撑单元7在实际使用过程中,对术后患者进行支撑时,在第一铰接座715的作用下,同时向内旋转第一调节机构71和第二调节机构72,直至腰部第一支撑机构73和腰部第二支撑机构74罩在术后患者的腰部,通过调节第一调节机构71和第二调节机构72自身的长度,让第一支撑机构73和腰部第二支撑机构74仅仅接触在一起。
56.请参阅图7,第一调节机构71包括一根伸缩杆711,伸缩杆711的底端、顶端分别与滑座620、支撑护板731之间对应通过第一铰接座715、第二铰接座716形成转动连接结构,在伸缩杆711伸缩区段的外部固定套接有第一衔接块712,且在伸缩杆711非伸缩段的外部固定套接有第二衔接块713,第一衔接块712和第二衔接块713两者之间共同固定连接有一根电动伸缩杆714,电动伸缩杆714的伸缩端与伸缩杆711的伸缩端同向设置。
57.第一调节机构71在实际使用时,控制电动伸缩杆714的伸长或缩短,实现第一调节
机构71整体长度的调节。
58.请参阅图8-9,腰部第一支撑机构73包括与第一调节机构71顶端连接在一起的支撑护板731,在支撑护板731的内侧端面固定连接有调节气囊732,且在支撑护板731的外侧端面固定连接有设备盒733,在设备盒733的内部分别固定安装有微型气泵i734和微型气泵ii735,在调节气囊732的内侧端面固定安装有压力传感器736,微型气泵i734的抽气口、微型气泵ii735的出气口均延伸至设备盒733的外部,且微型气泵i734的出气口、微型气泵ii735的抽气口均贯穿支撑护板731的内部,并最终均与调节气囊732连通在一起。
59.腰部第一支撑机构73在实际使用时,依靠内部所设置的调节气囊732自身的体积大小,实现对患者腰部形成有力的支撑,调节气囊732自身体积大小的调节,则是通过微型气泵i734和微型气泵ii735来实现,例如现在需要增大调节气囊732的体积,那么此时启动微型气泵i734,将外界的空气鼓入调节气囊732中,即可,相反,启动微型气泵ii735,抽出调节气囊732中的空气,可实现调节气囊732体积的减小。
60.本发明实施例还提供了一种使用方法,该方法应用于上述的用于术后康复锻炼的助行系统,包括如下步骤:
61.s1、术后患者登上所述的助行系统,并佩戴所述的肢体辅助支撑单元7,患者的双手扶持在所述的扶手杆5上;
62.s2、患者根据实际需求,使用所述的触控面板76,控制所述调节气囊732的体积,用以实现所述调节气囊732最优化的对患者腰部的支撑;
63.s3、患者再次使用所述的触控面板76,启动所述电动辅助单元6,并调节所述电动辅助单元6对所述肢体辅助支撑单元7的牵引速度,所述牵引速度满足患者的锻炼强度即可;
64.s4、患者在所述电动辅助单元6和肢体辅助支撑单元7的作用下,开始进行正向的行走锻炼;
65.s5、患者行走锻炼至所述助行系统的另一端,再次使用所述的触控面板76,调节所述肢体辅助支撑单元7的移动方向,让患者缓慢后退,往复操作即可。
66.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
67.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1