一种医疗领域的神经外科手术用支撑装置的制作方法
[0001]
本发明涉及医疗设备领域,更具体地说,涉及一种医疗领域的神经外科手术用支撑装置。
背景技术:
[0002]
神经外科是外科学中的一个分支,是在外科学以手术为主要治疗手段的基础上,应用独特的神经外科学研究方法,研究人体神经系统,如脑、脊髓和周围神经系统,以及与之相关的附属机构,如颅骨、头皮、脑血管脑膜等结构的损伤、炎症、肿瘤、畸形和某些遗传代谢障碍或功能紊乱疾病,如:癫痫、帕金森病、神经痛等疾病的病因及发病机制,并探索新的诊断、治疗、预防技术的一门高、精、尖学科,在神经外科进行手术时,通常手术时间较长,医生的手臂经常处于悬空状态,随着时间的增加,医生的疲劳感增强,劳动强度大,需要使用医疗领域的神经外科手术用支撑装置对医生的手臂进行支撑。
[0003]
现有医疗领域的神经外科手术用支撑装置只能单一的对医生的肘臂进行支撑,无法对肩臂进行支撑,医生的肩臂在手术过程中仍然处于悬空状态,劳动强度仍然很大,而且不能够根据医生的体格和习惯来进行调节,降低了医生手术时的舒适性,适用性较差,以上缺陷都会降低医生手术的准确度以及效率,甚至会发生医疗事故,因此亟需设计一种医疗领域的神经外科手术用支撑装置。
技术实现要素:
[0004]
1.要解决的技术问题针对现有技术中存在的现有医疗领域的神经外科手术用支撑装置只能单一的对医生的肘臂进行支撑,无法对肩臂进行支撑,医生的肩臂在手术过程中仍然处于悬空状态,劳动强度仍然很大,而且不能够根据医生的体格和习惯来进行调节,降低了医生手术时的舒适性,适用性较差,以上缺陷都会降低医生手术的准确度以及效率,甚至会发生医疗事故的问题,本发明的目的在于提供一种医疗领域的神经外科手术用支撑装置,它可以很好的解决背景技术中提出的问题。
[0005]
2.技术方案为解决上述问题,本发明采用如下的技术方案。
[0006]
一种医疗领域的神经外科手术用支撑装置,包括承载装置,所述承载装置的顶部设有导向装置。
[0007]
优选的,所述承载装置包括承载箱,承载箱的顶面上固定连接有承重筒,承重筒内腔的底面通过承重弹簧传动连接有承重活塞,承重活塞与承重筒的内壁滑动连接,承重活塞的顶面上固定连接有承重杆,承重杆的顶端延伸至承重筒的外部并活动插接在承重筒的顶面上,承载箱的内壁上固定连接有与承重筒相适配的导线轮,承载箱内腔的上下两面之间活动套接有旋转竖轴,旋转竖轴的外部活动套接有蓄能发条,蓄能发条的一端与旋转竖轴的表面固定连接,蓄能发条的另一端固定连接有定位板,定位板的底端固定连接在承载
箱内腔的底面上,旋转竖轴的外部固定套接有位于蓄能发条上方的绕线轮,绕线轮的外部缠绕有联动绳,联动绳的另一端绕过导线轮并延伸至承重筒的内部且与承重活塞的底面固定连接,旋转竖轴的外部固定套接有位于绕线轮上方的定高齿轮,承载箱内腔的顶面上设有高度调节装置。
[0008]
优选的,所述导向装置包括半圆环,半圆环的底面与承重杆的顶端固定连接,半圆环的顶面上固定连接有三个l型支杆,一个l型支杆的另一端固定连接有固定环,固定环上固定插接有半圆轨道,半圆轨道的端部固定连接有端部挡块,另外两个l型支杆的端部分别与两个端部挡块固定连接,半圆轨道的外部设有限位装置,半圆轨道的外部活动套接有蓄力弹簧,蓄力弹簧的一端与固定环固定连接,蓄力弹簧的另一端与限位装置固定连接,半圆轨道的底面上开设有止逆棘齿。
[0009]
优选的,所述限位装置包括位移滑块,位移滑块活动套接在半圆轨道的外部,蓄力弹簧的端部与位移滑块的端面固定连接,位移滑块内腔的底面上开设有固定凹槽,固定凹槽内腔的右侧面上固定连接有l型弹片,l型弹片的顶端与止逆棘齿单向啮合,l型弹片底面的左端固定连接有牵拉绳,牵拉绳的另一端延伸至位移滑块的外部并固定连接有牵拉环,位移滑块的顶面上固定连接有支撑柱,支撑柱的顶端活动插接有旋转柱,旋转柱可以相对支撑柱旋转,旋转柱的顶端设有角度调节装置。
[0010]
优选的,所述角度调节装置包括圆盘型箱,圆盘型箱的底面与旋转柱的顶端固定连接,圆盘型箱内腔的左侧面上固定连接有固定花键齿盘,圆盘型箱的右侧面上活动插接有窜动管,窜动管的外表面上固定连接有位于圆盘型箱外部的窜动条,窜动管的左端延伸至圆盘型箱的内部并固定连接有活动花键齿盘,活动花键齿盘与固定花键齿盘相适配,窜动管的外部活动套接有位于圆盘型箱内部的牵引弹簧,牵引弹簧的右端与圆盘型箱内腔的右侧面固定连接,牵引弹簧的左端与活动花键齿盘的右侧面固定连接,圆盘型箱的左侧面上固定连接有固定轴,固定轴上设有肩臂支撑装置,固定轴的内部螺纹套接有调节螺杆,调节螺杆的左端固定连接有调节帽,调节螺杆的右端穿过固定花键齿盘、活动花键齿盘并延伸至窜动管的内部且固定连接有牵引盘,牵引盘与活动花键齿盘的右侧面接触连接。
[0011]
优选的,所述肩臂支撑装置包括肩臂承载件,肩臂承载件底面的右端固定连接有第一翻转板和第二翻转板,第一翻转板活动套接在固定轴的外部,第二翻转板活动套接在窜动管的外部,第二翻转板的内壁上开设有联动凹槽,窜动条滑动卡接在联动凹槽的内部,肩臂承载件底面的左端设有肘臂支撑装置和夹角调节装置。
[0012]
优选的,所述肘臂支撑装置包括肘臂支撑板,肘臂支撑板的顶面上开设有扣合槽,肘臂支撑板的右端面上开设有矩形穿插孔,矩形穿插孔的内壁上开设有卡接孔,矩形穿插孔的内部活动插接有插接扁管,插接扁管的内壁上固定连接有隔离板,隔离板的侧面与插接扁管的内壁之间固定连接有定向滑杆,定向滑杆的外部活动套接有复位弹簧和复位活塞,复位弹簧的一端与隔离板的侧面固定连接,复位弹簧的另一端与复位活塞的侧面固定连接,复位活塞的另一面上固定连接有卡接头,卡接头的另一端延伸至插接扁管的外部并活动插接在卡接孔的内部,复位活塞的左侧面上固定连接有传动绳,传动绳的外部固定连接有牵引绳,牵引绳的另一端延伸至插接扁管的外部并固定连接有施力环,插接扁管的右端固定连接有内齿圈,内齿圈的底面上固定连接有下托举轴承,内齿圈的顶面上固定连接有上托举轴承,上托举轴承的顶面与肩臂承载件的底面固定连接。
[0013]
优选的,所述高度调节装置包括高度调节块,高度调节块的顶面固定连接在承载箱内腔的顶面上,高度调节块的内部开设有缓冲腔,缓冲腔内腔的右侧面通过缓冲弹簧传动连接有缓冲活塞,缓冲活塞与缓冲腔的内壁滑动连接,缓冲活塞的左侧面固定连接有啮合头,啮合头的左端延伸至高度调节块的外部并与定高齿轮啮合,缓冲活塞的右侧面固定连接有联动线,高度调节块的内部开设有位于缓冲腔右侧的直角梯形腔,直角梯形腔的内部滑动插接有直角梯形活塞,联动线的右端延伸至直角梯形腔的内部并与直角梯形活塞的左侧面固定连接,高度调节块的顶面上开设有固定竖孔,固定竖孔的内部活动插接有触发杆,触发杆的顶端活动插接在承载箱的顶面上并延伸至其外部,触发杆的底端与直角梯形活塞的倾斜面滑动连接,触发杆的正反两面上均固定连接有位于固定竖孔内部的限位档杆,固定竖孔的内壁上开设有与限位档杆相适配的滑槽,限位档杆与承载箱内腔的顶面接触连接。
[0014]
优选的,所述夹角调节装置包括夹角限位筒,夹角限位筒的顶端固定连接在肩臂承载件的底面上,夹角限位筒活动插接在内齿圈、下托举轴承、上托举轴承的内部,夹角限位筒的左右两侧面上均固定连接有张开筒,张开筒的内壁通过限位弹簧传动连接有限位活塞,限位活塞与张开筒的内壁滑动连接,限位活塞的另一面上固定连接有限位板,限位板的另一端延伸至张开筒的外部并与内齿圈啮合,限位活塞上固定连接有绷紧绳,夹角限位筒的底端固定连接有端部挡板,端部挡板的顶面与下托举轴承的底面固定连接,端部挡板上活动穿插有牵拉杆,牵拉杆的底端固定连接有牵引环,牵拉杆的顶端延伸至夹角限位筒的内部并与绷紧绳的端部固定连接。
[0015]
3.有益效果相比于现有技术,本发明的优点在于:通过承载装置和高度调节装置的配合,使得该支撑装置能够根据医生的身高进行相应调节,有助于增加该支撑装置的适用性,通过导向装置、限位装置、角度调节装置、肩臂支撑装置的配合对医生的肩臂进行支撑,降低了医生的劳动强度,同时使得该支撑装置能够根据医生手术时肩臂的张开角度进行相应的调节,调节后的该支撑装置符合医生手术时的操作习惯,舒适性较强,进一步增加了该支撑装置的适用性,通过肘臂支撑装置对医生的肘臂进行支撑,进一步降低了医生的劳动强度,通过肘臂支撑装置和夹角调节装置的配合对肘臂支撑装置与肩臂支撑装置之间的夹角进行调节和固定,使调节后的该支撑装置更加符合医生手术时的操作习惯,舒适性更强,再一次增加了该支撑装置的适用性,提升了医生手术的准确度以及效率,有助于降低医疗事故的发生率,提高了该医疗领域的神经外科手术用支撑装置的实用性。
附图说明
[0016]
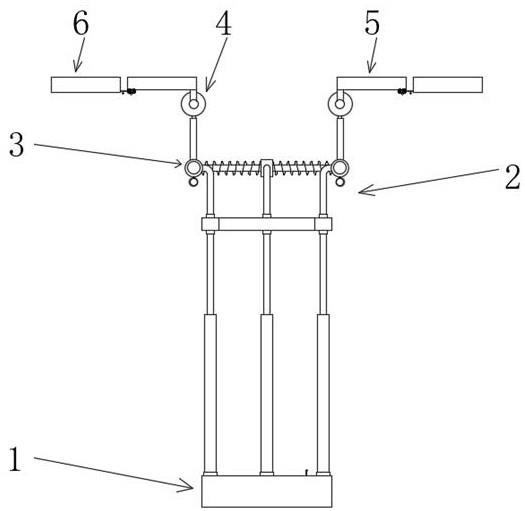
图1为本发明的结构示意图;图2为本发明图1中承载装置的内部结构示意图;图3为本发明图2中高度调节装置的内部结构示意图;图4为本发明图1中导向装置的结构示意图;图5为本发明图4中半圆轨道的俯视图;图6为本发明图4中限位装置的右视内部结构示意图;
图7为本发明图1中角度调节装置的左视内部结构示意图;图8为本发明图1中肩臂支撑装置的结构示意图;图9为本发明图8中夹角调节装置的内部结构示意图;图10为本发明图1中肘臂支撑装置的结构示意图;图11为本发明图10中a-a处的剖面图;图12为本发明图11中b处结构的放大示意图;图13为本发明图10中c处结构的放大示意图。
[0017]
图中标号说明:1、承载装置;101、承载箱;102、承重筒;103、承重弹簧;104、承重活塞;105、承重杆;106、导线轮;107、旋转竖轴;108、蓄能发条;109、定位板;110、绕线轮;111、联动绳;112、定高齿轮;2、导向装置;21、半圆环;22、l型支杆;23、固定环;24、半圆轨道;25、端部挡块;26、蓄力弹簧;27、止逆棘齿;3、限位装置;31、位移滑块;32、固定凹槽;33、l型弹片;34、牵拉绳;35、牵拉环;36、支撑柱;37、旋转柱;4、角度调节装置;401、圆盘型箱;402、固定花键齿盘;403、窜动管;404、窜动条;405、活动花键齿盘;406、牵引弹簧;407、固定轴;408、调节螺杆;409、调节帽;410、牵引盘;5、肩臂支撑装置;51、肩臂承载件;52、第一翻转板;53、第二翻转板;54、联动凹槽;6、肘臂支撑装置;601、肘臂支撑板;602、扣合槽;603、矩形穿插孔;604、卡接孔;605、插接扁管;606、隔离板;607、定向滑杆;608、复位弹簧;609、复位活塞;610、卡接头;611、传动绳;612、牵引绳;613、施力环;614、内齿圈;615、下托举轴承;616、上托举轴承;7、高度调节装置;701、高度调节块;702、缓冲腔;703、缓冲弹簧;704、缓冲活塞;705、啮合头;706、联动线;707、直角梯形腔;708、直角梯形活塞;709、固定竖孔;710、触发杆;711、限位档杆;8、夹角调节装置;81、夹角限位筒;82、张开筒;83、限位弹簧;84、限位活塞;85、限位板;86、绷紧绳;87、端部挡板;88、牵拉杆;89、牵引环。
具体实施方式
[0018]
下面将结合本发明实施例中的附图;对本发明实施例中的技术方案进行清楚、完整地描述;显然;所描述的实施例仅仅是本发明一部分实施例;而不是全部的实施例。基于本发明中的实施例;本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例;都属于本发明保护的范围。
[0019]
请参阅图1-13,一种医疗领域的神经外科手术用支撑装置,包括承载装置1,承载装置1的顶部设有导向装置2。
[0020]
承载装置1包括承载箱101,承载箱101的顶面上固定连接有承重筒102,承重筒102内腔的底面通过承重弹簧103传动连接有承重活塞104,承重活塞104与承重筒102的内壁滑动连接,承重活塞104的顶面上固定连接有承重杆105,承重杆105的顶端延伸至承重筒102的外部并活动插接在承重筒102的顶面上,承载箱101的内壁上固定连接有与承重筒102相适配的导线轮106,承载箱101内腔的上下两面之间活动套接有旋转竖轴107,旋转竖轴107的外部活动套接有蓄能发条108,蓄能发条108的一端与旋转竖轴107的表面固定连接,蓄能发条108的另一端固定连接有定位板109,定位板109的底端固定连接在承载箱101内腔的底面上,旋转竖轴107的外部固定套接有位于蓄能发条108上方的绕线轮110,绕线轮110的外部缠绕有联动绳111,联动绳111的另一端绕过导线轮106并延伸至承重筒102的内部且与承
重活塞104的底面固定连接,旋转竖轴107的外部固定套接有位于绕线轮110上方的定高齿轮112,承载箱101内腔的顶面上设有高度调节装置7。
[0021]
导向装置2包括半圆环21,半圆环21的底面与承重杆105的顶端固定连接,半圆环21的顶面上固定连接有三个l型支杆22,一个l型支杆22的另一端固定连接有固定环23,固定环23上固定插接有半圆轨道24,半圆轨道24的端部固定连接有端部挡块25,另外两个l型支杆22的端部分别与两个端部挡块25固定连接,半圆轨道24的外部设有限位装置3,半圆轨道24的外部活动套接有蓄力弹簧26,蓄力弹簧26的一端与固定环23固定连接,蓄力弹簧26的另一端与限位装置3固定连接,半圆轨道24的底面上开设有止逆棘齿27。
[0022]
限位装置3包括位移滑块31,位移滑块31活动套接在半圆轨道24的外部,蓄力弹簧26的端部与位移滑块31的端面固定连接,位移滑块31内腔的底面上开设有固定凹槽32,固定凹槽32内腔的右侧面上固定连接有l型弹片33,l型弹片33的顶端与止逆棘齿27单向啮合,l型弹片33底面的左端固定连接有牵拉绳34,牵拉绳34的另一端延伸至位移滑块31的外部并固定连接有牵拉环35,位移滑块31的顶面上固定连接有支撑柱36,支撑柱36的顶端活动插接有旋转柱37,旋转柱37可以相对支撑柱36旋转,旋转柱37的顶端设有角度调节装置4,让助手牵拉牵拉环35,接着牵拉环35通过牵拉绳34牵拉l型弹片33,使l型弹片33的端部向下弯曲,之后l型弹片33的端部与止逆棘齿27分开,使限位装置3能够在蓄力弹簧26弹力的作用下复位。
[0023]
角度调节装置4包括圆盘型箱401,圆盘型箱401的底面与旋转柱37的顶端固定连接,圆盘型箱401内腔的左侧面上固定连接有固定花键齿盘402,圆盘型箱401的右侧面上活动插接有窜动管403,窜动管403的外表面上固定连接有位于圆盘型箱401外部的窜动条404,窜动管403的左端延伸至圆盘型箱401的内部并固定连接有活动花键齿盘405,活动花键齿盘405与固定花键齿盘402相适配,窜动管403的外部活动套接有位于圆盘型箱401内部的牵引弹簧406,牵引弹簧406的右端与圆盘型箱401内腔的右侧面固定连接,牵引弹簧406的左端与活动花键齿盘405的右侧面固定连接,圆盘型箱401的左侧面上固定连接有固定轴407,固定轴407上设有肩臂支撑装置5,固定轴407的内部螺纹套接有调节螺杆408,调节螺杆408的左端固定连接有调节帽409,调节螺杆408的右端穿过固定花键齿盘402、活动花键齿盘405并延伸至窜动管403的内部且固定连接有牵引盘410,牵引盘410与活动花键齿盘405的右侧面接触连接。
[0024]
肩臂支撑装置5包括肩臂承载件51,肩臂承载件51底面的右端固定连接有第一翻转板52和第二翻转板53,第一翻转板52活动套接在固定轴407的外部,第二翻转板53活动套接在窜动管403的外部,第二翻转板53的内壁上开设有联动凹槽54,窜动条404滑动卡接在联动凹槽54的内部,肩臂承载件51底面的左端设有肘臂支撑装置6和夹角调节装置8。
[0025]
肘臂支撑装置6包括肘臂支撑板601,肘臂支撑板601的顶面上开设有扣合槽602,肘臂支撑板601的右端面上开设有矩形穿插孔603,矩形穿插孔603的内壁上开设有卡接孔604,矩形穿插孔603的内部活动插接有插接扁管605,插接扁管605的内壁上固定连接有隔离板606,隔离板606的侧面与插接扁管605的内壁之间固定连接有定向滑杆607,定向滑杆607的外部活动套接有复位弹簧608和复位活塞609,复位弹簧608的一端与隔离板606的侧面固定连接,复位弹簧608的另一端与复位活塞609的侧面固定连接,复位活塞609的另一面上固定连接有卡接头610,卡接头610的另一端延伸至插接扁管605的外部并活动插接在卡
接孔604的内部,复位活塞609的左侧面上固定连接有传动绳611,传动绳611的外部固定连接有牵引绳612,牵引绳612的另一端延伸至插接扁管605的外部并固定连接有施力环613,插接扁管605的右端固定连接有内齿圈614,内齿圈614的底面上固定连接有下托举轴承615,内齿圈614的顶面上固定连接有上托举轴承616,上托举轴承616的顶面与肩臂承载件51的底面固定连接。
[0026]
高度调节装置7包括高度调节块701,高度调节块701的顶面固定连接在承载箱101内腔的顶面上,高度调节块701的内部开设有缓冲腔702,缓冲腔702内腔的右侧面通过缓冲弹簧703传动连接有缓冲活塞704,缓冲活塞704与缓冲腔702的内壁滑动连接,缓冲活塞704的左侧面固定连接有啮合头705,啮合头705的左端延伸至高度调节块701的外部并与定高齿轮112啮合,缓冲活塞704的右侧面固定连接有联动线706,高度调节块701的内部开设有位于缓冲腔702右侧的直角梯形腔707,直角梯形腔707的内部滑动插接有直角梯形活塞708,联动线706的右端延伸至直角梯形腔707的内部并与直角梯形活塞708的左侧面固定连接,高度调节块701的顶面上开设有固定竖孔709,固定竖孔709的内部活动插接有触发杆710,触发杆710的顶端活动插接在承载箱101的顶面上并延伸至其外部,触发杆710的底端与直角梯形活塞708的倾斜面滑动连接,触发杆710的正反两面上均固定连接有位于固定竖孔709内部的限位档杆711,固定竖孔709的内壁上开设有与限位档杆711相适配的滑槽,限位档杆711与承载箱101内腔的顶面接触连接。
[0027]
夹角调节装置8包括夹角限位筒81,夹角限位筒81的顶端固定连接在肩臂承载件51的底面上,夹角限位筒81活动插接在内齿圈614、下托举轴承615、上托举轴承616的内部,夹角限位筒81的左右两侧面上均固定连接有张开筒82,张开筒82的内壁通过限位弹簧83传动连接有限位活塞84,限位活塞84与张开筒82的内壁滑动连接,限位活塞84的另一面上固定连接有限位板85,限位板85的另一端延伸至张开筒82的外部并与内齿圈614啮合,限位活塞84上固定连接有绷紧绳86,夹角限位筒81的底端固定连接有端部挡板87,端部挡板87的顶面与下托举轴承615的底面固定连接,端部挡板87上活动穿插有牵拉杆88,牵拉杆88的底端固定连接有牵引环89,牵拉杆88的顶端延伸至夹角限位筒81的内部并与绷紧绳86的端部固定连接。
[0028]
工作原理:首先站在承载箱101的顶面上,使半圆环21和半圆轨道24扣合在身上,然后张开手臂并将肩臂与肩臂承载件51对准、肘臂与扣合槽602对准,使肩臂承载件51、扣合槽602向上移动时能够分别扣合在肩臂和肘臂上,接着脚踏触发杆710,之后触发杆710对直角梯形活塞708的倾斜面施加压力,然后直角梯形活塞708在其倾斜面导向的作用下向右移动并通过联动线706牵拉缓冲活塞704向右移动,接着缓冲活塞704带着啮合头705向右移动,之后啮合头705与定高齿轮112分开,然后承重活塞104在承重弹簧103顶升力的作用下带着承重杆105向上移动并牵拉联动绳111,使联动绳111从绕线轮110的外部释放,同时联动绳111通过绕线轮110、旋转竖轴107对蓄能发条108做功,使蓄能发条108的弹性势能增加,接着承重杆105带着导向装置2向上移动,之后导向装置2通过限位装置3、角度调节装置4带着肩臂支撑装置5向上移动,然后肩臂支撑装置5通过夹角调节装置8带着肘臂支撑装置6向上移动,直至肩臂承载件51扣合在肩臂上,扣合槽602扣合在肘臂上,对手臂进行支撑,接着停止对触发杆710施加压力,之后缓冲活塞704在缓冲弹簧703弹力的作用下带着啮合头705向左移动
并牵拉联动线706,然后啮合头705与定高齿轮112啮合,将承载装置1的高度固定住,同时联动线706牵拉直角梯形活塞708向左滑动至起始位置,接着直角梯形活塞708的倾斜面对触发杆710施加向上的推力,之后触发杆710在推力的作用下向上移动,直至限位档杆711与承载箱101内腔的顶面接触,实现对触发杆710的复位,然后让助手通过调节帽409转动调节螺杆408,接着调节螺杆408在其与固定轴407螺纹配合的作用下带着牵引盘410向右窜动,之后活动花键齿盘405在牵引弹簧406弹性拉力的作用下通过窜动管403带着窜动条404向右窜动,然后活动花键齿盘405与固定花键齿盘402分开,接着根据手术习惯将肩臂向前并向下翻转移动,之后肩臂对肩臂支撑装置5施加推动力和压力,然后肩臂支撑装置5在推动力的作用下以支撑柱36为中心轴向前翻转,同时肩臂支撑装置5通过支撑柱36、旋转柱37带着位移滑块31在半圆轨道24上滑动,在肩臂向前翻转到位后,接着l型弹片33在自身弹力的作用下复位并与止逆棘齿27单向啮合,将位移滑块31固定卡接住,之后肩臂承载件51在压力的作用下以固定轴407和窜动管403为中心轴向下翻转,同时肩臂承载件51通过第二翻转板53、联动凹槽54与窜动条404的配合、窜动管403带着活动花键齿盘405转动,直至向下翻转到位,然后让助手反向转动调节帽409,使活动花键齿盘405与固定花键齿盘402啮合,将肩臂承载件51的倾斜角度固定住,接着让助手牵拉牵引环89,之后牵引环89通过牵拉杆88牵拉绷紧绳86,绷紧绳86向下弯曲并牵拉限位活塞84,然后限位活塞84带着限位板85向张开筒82的内部移动并与内齿圈614分开,接着肘臂对肘臂支撑装置6施加翻转力,之后肘臂支撑装置6以夹角限位筒81为中心轴向前翻转,直至肘臂翻转到位,然后让助手松开牵引环89,接着限位活塞84在限位弹簧83弹力的作用下带着限位板85向外移动并与内齿圈614啮合,将肘臂支撑装置6与肩臂支撑装置5之间的夹角固定住,在需要对肘臂上的支撑点进行调节时,让助手通过施力环613牵拉牵引绳612,之后牵引绳612牵拉传动绳611,然后传动绳611牵拉复位活塞609,接着复位活塞609带着卡接头610向插接扁管605的内部移动并与卡接孔604分开,然后肘臂支撑板601可以在外力的作用下相对插接扁管605左右移动,接着对肘臂支撑板601施力,对肘臂支撑板601的位置进行调节,调节好之后,松开施力环613,复位活塞609在复位弹簧608弹力的作用下带着卡接头610插入卡接孔604,将肘臂支撑板601与插接扁管605固定在一起,此时肩臂被肩臂承载件51托举着,肘臂被肘臂支撑板601托举着,最后开始进行手术,即可。
[0029]
以上所述;仅为本发明较佳的具体实施方式;但本发明的保护范围并不局限于此;任何熟悉本技术领域的技术人员在本发明揭露的技术范围内;根据本发明的技术方案及其改进构思加以等同替换或改变;都应涵盖在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1