给液辅助装置的制作方法
1.本发明涉及一种给液辅助装置。
背景技术:
2.现有的给液泵部件内在使用时或者再次使用时需要通过用于加药的注射器向给液泵部件注入药液后再进行使用。使用时,给液泵部件通过内部的压力缓慢持续的将药液压出并输送给患者。然而,由于给液泵部件内部必然需要有持续的压力,因此,在向给液泵补充药液的时候,通过传统的手持注射器向内注射的阻力非常大,导致补充药液困难,补充药液的效率低。
技术实现要素:
3.本发明要解决的技术问题是为了克服现有技术中向给液泵补充药液阻力大,补充药液困难且效率低的缺陷,提供一种给液辅助装置。
4.本发明是通过下述技术方案来解决上述技术问题:
5.一种给液辅助装置,其特点在于,所述给液辅助装置包括:
6.一壳体;
7.一推动件,所述推动件滑动设置于所述壳体内,且所述推动件上形成有配合表面,所述推动件的前端具有一用于推动注射装置的推动部;
8.一手柄,所述手柄与所述壳体转动连接;
9.一配合爪,所述配合爪转动连接在所述手柄上,其中,所述手柄朝着靠近所述推动件的方向转动时,所述配合爪与所述配合表面卡合并带动所述推动件进行滑动。
10.本发明中,通过转动手柄来带动配合爪的移动,配合爪通过卡合配合表面,从而推动推动件移动,由此,将手柄的转动运动转换为直线运动。其中,利用手柄的杠杆原理,可以将转动手柄的力放大至配合爪的推动力,由此使得可以运用更小的力来推动例如注射器的各种注射装置。同时,本发明中进行推动时手柄朝着靠近推动件的方向移动,因此可以通过借助用户本身的重力将手柄压向推动件,从而能够获得更大的推力。
11.本发明通过手柄和配合爪的配合,可以将用户的操作力放大,使得用户能够更容易的抵抗阻力并将药液充入给液泵中。同时,通过借助本身重力能够进一步增加推动的力量,显著提高了充液效率。
12.较佳地,所述配合爪在一朝向所述推动部的方向上与所述配合表面卡合,并在一远离所述推动部的方向上与所述配合表面不卡合。由此配合爪并没有完全锁死在配合表面上,通过在远离所述推动部的方向上移动,可以实现配合爪的脱离从而进行下一次的动作。
13.较佳地,所述给液辅助装置还包括一回撤件,随着所述手柄朝远离所述推动件的方向的转动,所述回撤件带动所述配合爪脱离所述配合表面。回撤件通过在远离所述推动部的方向上移动,可以实现配合爪的脱离从而进行下一次的动作。
14.较佳地,所述回撤件相对于所述手柄固定设置,其中,随着所述手柄朝远离所述推
动件的方向的转动,所述回撤件靠近并推动所述配合爪脱离所述配合表面;随着所述手柄朝靠近所述推动件的方向的转动,所述回撤件远离所述配合爪。回撤件与手柄相对固定,由此,在为下一次动作进行准备的时候,向远离推动件的方向转动手柄就可以同时将手柄、回撤件以及配合爪均移动至原位,提高了再次操作前的复位效率。
15.较佳地,所述回撤件具有一本体以及一凸出端部,随着所述手柄朝远离所述推动件的方向的转动,所述凸出端部靠近并推动所述配合爪脱离所述配合表面。通过凸出端部和本体的分别设置,使得本体可以避免与配合爪干涉,仅在凸出端部碰到配合爪时才产生推动作用。
16.较佳地,所述手柄的两侧均设置有转轴或者转孔,所述壳体的对应于所述手柄的位置上设置有转孔或者转轴,所述转轴与转孔配合并产生相对转动。
17.较佳地,所述手柄的宽度方向上包括间隔设置的两个侧柄壁,其中,所述配合爪转动连接于两个所述侧柄壁之间。由于回撤件设置于侧柄壁之间,因此配合爪可以在中间与推动件对齐,不仅减少手柄外侧的结构,而且避免推动件在手柄外侧延伸,由此能够明显减少在宽度方向上的尺寸。
18.较佳地,所述回撤件固定连接于两个所述侧柄壁之间。回撤件与配合爪对应设置,因此回撤件也设置为侧柄壁之间,由此避免回撤件在手柄外侧延伸,能够明显减少在宽度方向上的尺寸。
19.较佳地,所述回撤件设置于所述手柄上的位于所述推动件和所述配合爪之间的位置。在进行推进动作时,回撤件和配合爪一起随着手柄靠近推动件,此时的回撤件与配合爪不会产生干涉。通过回撤件的位置设置,在进行复位动作时配合爪位于回撤件的运动轨迹上,回撤件随着手柄远离推动件,并将搁置在推动件上的配合爪抬离推动件。
20.较佳地,所述配合爪与所述手柄之间的转动轴线偏心于所述壳体与所述手柄之间的转动轴线。配合爪的转动轴线随着手柄一起转动,同时配合爪自身绕着转动轴线转动,由此产生了运动的合成,使得配合爪能够灵活地与配合表面进行卡合或者脱离。
21.较佳地,所述壳体具有与一容纳腔以及一转动槽口,所述推动件设置于所述容纳腔内,所述手柄穿过所述转动槽口并露出于所述壳体的外侧,所述手柄转动时与所述转动槽口不产生干涉。转动槽口允许了手柄的转动,同时也通过半封闭的设置将运动机构约束起来。
22.较佳地,所述壳体还具有一推动槽口,所述推动槽口与所述转动槽口隔开设置,其中,所述推动槽口用于将一注射装置安装进入所述容纳腔内,所述推动部位于所述推动槽口一侧,并朝向注射装置设置。转动槽口允许了推动部件的滑动,同时也通过半封闭的设置将注射装置约束起来。
23.较佳地,所述壳体还具有一容纳腔以及一推动槽口,其中,所述推动槽口用于将一注射装置安装进入所述容纳腔内,所述推动部位于所述推动槽口一侧,并朝向注射装置设置。
24.较佳地,所述推动部延伸并露出于所述推动槽口的外侧,所述推动部沿着所述推动槽口的长度方向滑动,且所述推动部的滑动与所述推动槽口不产生干涉。外露的推动部利于观察对注射装置的推动量。同时也能够增加推动部的面积,提高对注射装置的接触稳定性。
25.较佳地,所述推动槽口上还形成有一限位槽,所述限位槽用于限位注射装置。通过限位槽将注射装置的例如注射筒固定,由此可以避免手持注射装置,只需要操作手柄即可完成注入药液。
26.较佳地,所述壳体具有一上壳以及一下壳,所述上壳与所述下壳之间形成一容纳腔,其中,所述上壳上设置一推动槽口以及一转动槽口,所述推动槽口以及所述转动槽口之间隔档设置有一阻隔部,所述推动部露出于所述推动槽口,所述手柄露出于所述转动槽口,所述推动件设置于所述容纳腔内。通过上壳以及下壳将主要运动机构均限制在容纳腔内。推动槽口以及转动槽口实现了手柄和推动部的运动,同时通过阻隔部阻挡,避免推动件从贯通的槽口内脱出。
27.较佳地,所述壳体内设置有引导件,所述推动件上设置有引导部,所述引导件与所述引导部配合,并限制所述推动件在宽度方向上的移动。
28.较佳地,所述引导件的数量为两个并设置为沿着所述壳体上表面向下延伸,所述引导部向上延伸并限位于两个所述引导件之间。
29.较佳地,所述壳体的下表面设置有两条限位凸筋,所述推动件被限位于两条所述限位凸筋内。
30.较佳地,所述配合表面包括沿着所述推动件长度方向排列的锯齿,所述配合爪的底部形状与所述配合表面相适配。
31.本发明的积极进步效果在于:本发明通过手柄和配合爪的配合,可以将用户的操作力放大,使得用户能够更容易的抵抗阻力并将药液充入给液泵中。同时,通过借助本身重力能够进一步增加推动的力量,显著提高了充液效率。
附图说明
32.图1为本发明较佳实施例的给液辅助装置的使用状态示意图。
33.图2为本发明较佳实施例的给液辅助装置的立体结构示意图。
34.图3为本发明较佳实施例的给液辅助装置的俯视结构示意图。
35.图4为图3中的a-a方向结构示意图。
36.图5为本发明较佳实施例的运动机构的立体结构示意图。
37.图6为本发明较佳实施例的运动机构的剖视结构示意图。
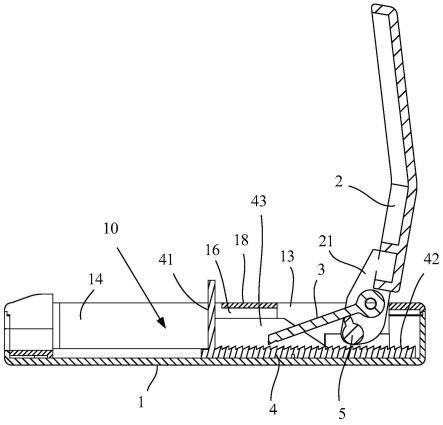
38.图7为本发明较佳实施例的给液辅助装置的初始和复位状态剖视图。
39.图8为本发明较佳实施例的给液辅助装置的下压状态剖视图。
具体实施方式
40.下面通过实施例的方式进一步说明本发明,但并不因此将本发明限制在所述的实施例范围之中。
41.如图1-图8所示,本实施例公开了一种给液辅助装置,其中,如图1所示,本实施例的给液辅助装置包括一壳体1,壳体1具有一上壳11以及一下壳12。上壳11以及一下壳12之间可以通过螺纹紧固件连接起来。
42.如图2和图5所示,本实施例的给液辅助装置包括一推动件4,推动件4滑动设置于壳体1内,且推动件4上形成有配合表面42,推动件4的前端具有一用于推动注射装置6的推
动部41。
43.如图2和图5所示,本实施例的给液辅助装置包括一手柄2,手柄2与壳体1转动连接。本实施例的给液辅助装置还包括一配合爪3,配合爪3转动连接在手柄2上,其中,手柄2朝着靠近推动件4的方向转动时,配合爪3与配合表面42卡合并带动推动件4进行滑动。
44.本发明中,通过转动手柄2来带动配合爪3的移动,配合爪3通过卡合配合表面42,从而推动推动件4移动,由此,将手柄2的转动运动转换为直线运动。其中,利用手柄2的杠杆原理,可以将转动手柄2的力放大至配合爪3的推动力,由此使得可以运用更小的力来推动例如注射器的各种注射装置6。同时,本发明中进行推动时手柄2朝着靠近推动件4的方向移动,因此可以通过借助用户本身的重力将手柄2压向推动件4,从而能够获得更大的推力。
45.本发明通过手柄2和配合爪3的配合,可以将用户的操作力放大,使得用户能够更容易的抵抗阻力并将药液充入给液泵7中。同时,通过借助本身重力能够进一步增加推动的力量,显著提高了充液效率。
46.如图4、图5和图6所示,本实施例的配合爪3在一朝向推动部41的方向上与配合表面42卡合,并在一远离推动部41的方向上与配合表面42不卡合。由此配合爪3并没有完全锁死在配合表面42上,通过在远离推动部41的方向上移动,可以实现配合爪3的脱离从而进行下一次的动作。
47.如图4、图5和图6所示,本实施例的给液辅助装置还包括一回撤件5,随着手柄2朝远离推动件4的方向的转动,回撤件5带动配合爪3脱离配合表面42。回撤件5通过在远离推动部41的方向上移动,可以实现配合爪3的脱离从而进行下一次的动作。
48.如图4、图5和图6所示,本实施例的回撤件5相对于手柄2固定设置,其中,随着手柄2朝远离推动件4的方向的转动,回撤件5靠近并推动配合爪3脱离配合表面42;随着手柄2朝靠近推动件4的方向的转动,回撤件5远离配合爪3。回撤件5与手柄2相对固定,由此,在为下一次动作进行准备的时候,向远离推动件4的方向转动手柄2就可以同时将手柄2、回撤件5以及配合爪3均移动至原位,提高了再次操作前的复位效率。
49.如图6所示,本实施例的回撤件5具有一本体51以及一凸出端部52,如图7所示,随着手柄2朝远离推动件4的方向的转动,如图8所示,凸出端部52靠近并推动配合爪3脱离配合表面42。通过凸出端部52和本体51的分别设置,使得本体51可以避免与配合爪3干涉,仅在凸出端部52碰到配合爪3时才产生推动作用。
50.如图6所示,本实施例的手柄2的两侧均设置有转轴22,壳体1的对应于手柄2的位置上设置有转孔,转轴22与转孔配合并产生相对转动。在其他实施例中,转轴和转孔的位置可以互换。
51.如图5和图6所示,本实施例的手柄2的宽度方向上包括间隔设置的两个侧柄壁21,其中,配合爪3转动连接于两个侧柄壁21之间。由于回撤件5设置于侧柄壁21之间,因此配合爪3可以在中间与推动件4对齐,不仅减少手柄2外侧的结构,而且避免推动件4在手柄2外侧延伸,由此能够明显减少在宽度方向上的尺寸。
52.如图5和图6所示,本实施例的回撤件5固定连接于两个侧柄壁21之间。回撤件5与配合爪3对应设置,因此回撤件5也设置为侧柄壁21之间,由此避免回撤件5在手柄2外侧延伸,能够明显减少在宽度方向上的尺寸。
53.如图5和图6所示,本实施例的回撤件5设置于手柄2上的位于推动件4和配合爪3之
间的位置。在进行推进动作时,如图7所示,回撤件5和配合爪3一起随着手柄2靠近推动件4,此时的回撤件5与配合爪3不会产生干涉。如图8所示,通过回撤件5的位置设置,在进行复位动作时配合爪3位于回撤件5的运动轨迹上,回撤件5随着手柄2远离推动件4,并将搁置在推动件4上的配合爪3抬离推动件4。
54.如图5和图6所示,本实施例的配合爪3与手柄2之间的转动轴线偏心于壳体1与手柄2之间的转动轴线。配合爪3的转动轴线随着手柄2一起转动,同时配合爪3自身绕着转动轴线转动,由此产生了运动的合成,使得配合爪3能够灵活地与配合表面42进行卡合或者脱离。
55.如图2、图3和图4所示,本实施例的壳体1具有与一容纳腔10以及一转动槽口13,推动件4设置于容纳腔10内,手柄2穿过转动槽口13并露出于壳体1的外侧,手柄2转动时与转动槽口13不产生干涉。转动槽口13允许了手柄2的转动,同时也通过半封闭的设置将运动机构约束起来。
56.如图2、图3和图4所示,本实施例的壳体1还具有一推动槽口14,推动槽口14与转动槽口13隔开设置,其中,推动槽口14用于将一注射装置6安装进入容纳腔10内,推动部41位于推动槽口14一侧,并朝向注射装置6设置。转动槽口13允许了推动部41件的滑动,同时也通过半封闭的设置将注射装置6约束起来。
57.如图2、图3和图4所示,本实施例的壳体1具有容纳腔10以及推动槽口14,其中,推动槽口14用于将一注射装置6安装进入容纳腔10内,推动部41位于推动槽口14一侧,并朝向注射装置6设置。
58.如图2、图3和图4所示,本实施例的推动部41延伸并露出于推动槽口14的外侧,推动部41沿着推动槽口14的长度方向滑动,且推动部41的滑动与推动槽口14不产生干涉。外露的推动部41利于观察对注射装置6的推动量。同时也能够增加推动部41的面积,提高对注射装置6的接触稳定性。
59.如图2和图3所示,本实施例的推动槽口14上还形成有一限位槽15,限位槽15用于限位注射装置6。通过限位槽15将注射装置6的例如注射筒固定,由此可以避免手持注射装置6,只需要操作手柄2即可完成注入药液。
60.如图1、图2和图3所示,本实例的壳体1具有一上壳11以及一下壳12,上壳11与下壳12之间形成一容纳腔10,其中,上壳11上设置一推动槽口14以及一转动槽口13,推动槽口14以及转动槽口13之间隔档设置有一阻隔部,推动部41露出于推动槽口14,手柄2露出于转动槽口13,推动件4设置于容纳腔10内。通过上壳11以及下壳12将主要运动机构均限制在容纳腔10内。推动槽口14以及转动槽口13实现了手柄2和推动部41的运动,同时通过阻隔部阻挡,避免推动件4从贯通的槽口内脱出。
61.如图4、图7和图8所示,本实施例的壳体1内设置有引导件16,推动件4上设置有引导部43,引导件16与引导部43配合,并限制推动件4在宽度方向上的移动。
62.如图4、图7和图8所示,本实施例的引导件16的数量为两个并设置为沿着壳体1上表面向下延伸,引导部43向上延伸并限位于两个引导件16之间。如图4所示,壳体1的下表面设置有两条限位凸筋17,推动件4被限位于两条限位凸筋17内。
63.本实施例中,配合表面42包括沿着推动件4长度方向排列的锯齿,配合爪3的底部形状与配合表面42相适配。当然在其他实施例中,配合表面42也可以是具有凹坑、凸起等可
以进行卡合的表面形状。
64.本发明通过手柄和配合爪的配合,可以将用户的操作力放大,使得用户能够更容易的抵抗阻力并将药液充入给液泵中。同时,通过借助本身重力能够进一步增加推动的力量,显著提高了充液效率。
65.虽然以上描述了本发明的具体实施方式,但是本领域的技术人员应当理解,这仅是举例说明,本发明的保护范围是由所附权利要求书限定的。本领域的技术人员在不背离本发明的原理和实质的前提下,可以对这些实施方式做出多种变更或修改,但这些变更和修改均落入本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1