下肢康复机器人训练控制方法及系统与流程
1.本发明涉及一种下肢康复机器人训练控制方法及系统。
背景技术:
2.具有肢体残障和瘫痪的病人数量逐年增加,而对于由神经损伤导致肢体障碍的患者,肢体功能能否恢复关系着其后期生活质量。肢体障碍的恢复是一个漫长的过程,对于经过手术以及药物治疗后的患者,目前有效的运动机能恢复手段就是康复运动训练。
3.随着老龄化的加剧,需要进行康复治疗的患者与日俱增,与此同时具有相关资质的康复训练师极其匮乏,传统疗法全程需要人工介入,效率低下,费用高,患者的经济负担较重。目前进口的康复设备价格居高不下,急需一款下肢康复训练系统来用机器人辅助康复训练,从而提高效率,降低成本,减少理疗人员的体力消耗,优化康复医疗资源的配置。
4.总而言之,目前的下肢康复训练系统存在如下问题:
5.其一,对于病情复杂的患者效果有限:多以单自由度为主,无法应对多个肢体关节具有运动障碍的情形;
6.其二,没有因人而异的个性化训练功能:每个患者的身体条件、精神健康水平以及对于训练强度的耐受程度均不同,统一的训练模式无法准确契合患者的个人意愿,训练效果不佳甚至有造成病情加剧的风险;
7.其三,舒适度差、患者的体力负担重:多数需要要求患者处于站姿,增加患者的体力负担,降低单次康复训练时间,延长康复训练周期,甚至部分不具有站立能力的患者无法适用。
技术实现要素:
8.有鉴于此,有必要提供一种下肢康复机器人训练控制方法及系统,其能够使用机器人对需要下肢康复的患者进行有效训练。
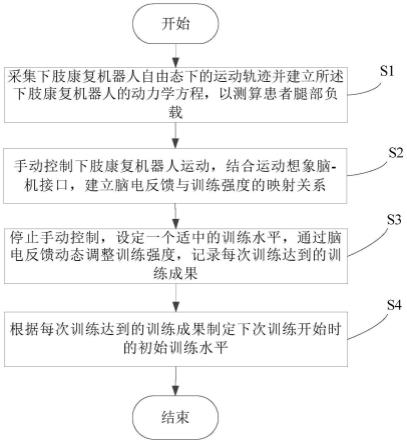
9.本发明一种下肢康复机器人训练控制方法,该方法包括如下步骤:a.采集下肢康复机器人自由态下的运动轨迹并建立所述下肢康复机器人的动力学方程,以测算患者腿部负载;b.手动控制下肢康复机器人运动,结合运动想象脑-机接口,建立脑电反馈与训练强度的映射关系;c.停止手动控制,通过测算的患者腿部负载及建立的脑电反馈与训练强度的映射关系设定一个适中的训练水平,通过脑电反馈动态调整训练强度,记录每次训练达到的训练成果;所述适中的训练水平指兼顾患者的适应力、舒适度和训练效率的训练水平;d.根据每次训练达到的训练成果制定下次训练开始时的初始训练水平。
10.进一步地,所述的动力学方程如下:
[0011][0012]
式中的m、b、k分别为6
×
4的三个矩阵,分别表征质量、阻尼和刚度,fe为所述下肢康复机器人所受的外力。
[0013]
进一步地,所述的步骤b具体包括:
[0014]
步骤b1,特征提取:由两个过滤器组成,第一过滤器通过计算输入信号与空间滤波矩阵的矩阵乘法来实现任何线性空间滤波操作,对于自发脑电中的健康成年人常见频段进行滤除;第二过滤器为时间过滤器,采用希尔伯特-黄变换(hht)进行能量特征提取;
[0015]
步骤b2,特征转换:患者想象自己腿部进行康复运动,并通过下肢康复机器人拖动患者腿部使得患者腿部受迫运动,配合采集到的脑电信号特征建立每名患者腿部想象/实际开始运动时的脑电信号特征,所述脑电信号特征作为患者想要开始训练的脑电驱动信息;通过患者想象腿部逐渐停止运动/并实际控制机器人逐渐减速直至带动患者腿部逐渐停止,记录的特征作为患者想要停止训练的脑电驱动信息。
[0016]
进一步地,所述的步骤b1包括:
[0017]
首先找到滤波后信号中所有局部极大值以及局部极小值,并分别通过三次样条顺序连接成包络线,设原始信号为x(t),上下包络线的均值为m1,则原始信号与包络线的差值记为:
[0018]
h1(t)=x(t)-m1(t)
[0019]
将h1(t)作为原始函数重复如上的过程,直至原始信号与包络线的差值满足imf条件,原始信号分解为:
[0020][0021]
设定停止条件:
[0022][0023]
sd的阈值设定为0.25,当小于阈值时停止迭代。
[0024]
进一步地,所述的步骤b2包括:
[0025]
手动调整下肢康复机器人的训练强度,从初始的较轻强度逐渐提升至患者承受的极限,最后逐渐降低回最低水平,并实时记录每个时刻患者的脑部信号反馈,建立患者脑部信号与个人训练意愿的映射:
[0026]
b21、获取患者脑电信号特征变化与当前对应时刻的机器人各个关节极限位置,作为患者当前可承受的主动训练在空间上的范围;
[0027]
b22、在满足b21的范围内逐渐提高速度,和腿部受力,记录极限数值,作为患者当前可承受的主动训练在生理上的范围;
[0028]
b23、满足b21、b22两点的范围内,记录训练时长的极限值;
[0029]
将上述三项试验中的极限数值确定后,则认为超过上述三项极限则患者个人训练意愿减退。
[0030]
进一步地,所述的步骤c包括:
[0031]
开始自主训练后,通过检测患者想象开始运动的信号特征,控制下肢康复机器人在运动中实时检测患者脑电信号是否由想象开始运动到想象中止运动的特征变化,根据特征实时变化对训练强度进行调整,来替代医师经过询问的粗略调整方式;
[0032]
逐渐突破三项极限值,如遇到消极的反馈则退回原有水平,随着训练次数的增加,各项极限值逐渐趋近于患者能够接受的水平,将历史上所有训练中的各项极限值存储下来
作为判断后续训练任务强度的数据。
[0033]
进一步地,所述的步骤c包括:
[0034]
对于患者自主训练的不同水平等级的调整体现在为患者腿部提供的阻力或助力,采用七阶有理多项式力补偿模型:
[0035][0036]
所述补偿模型共有8个可调整参数,以适应对于补偿力的灵活变化。
[0037]
进一步地,所述的步骤d包括:
[0038]
根据运动幅度、时长、速度和力度评估,若上次康复运动中上述各项指标相对历史数据的均值有明显的变化,则将训练的这个四个强度均向变化的方向进行微调;若四个强度指标没有发生明显变化甚至出现指标降低的趋势,则稳定于上一次的指标进行康复训练。
[0039]
本发明提供还一种下肢康复机器人训练控制系统,该系统包括负载测算模块、映射关系模块、训练设定模块、训练计划模块,其中:所述负载测算模块用于采集下肢康复机器人自由态下的运动轨迹并建立所述下肢康复机器人的动力学方程,以测算患者腿部负载;所述映射关系模块用于手动控制下肢康复机器人运动时,结合运动想象脑-机接口,建立脑电反馈与训练强度的映射关系;所述训练设定模块用于停止手动控制时,通过测算的患者腿部负载及建立的脑电反馈与训练强度的映射关系设定一个适中的训练水平,通过脑电反馈动态调整训练强度,记录每次训练达到的训练成果;所述适中的训练水平指兼顾患者的适应力、舒适度和训练效率的训练水平;所述训练计划用于根据每次训练达到的训练成果制定下次训练开始时的初始训练水平。
[0040]
本发明能够使用机器人对需要下肢康复的患者进行有效训练,为患者提供一个仰卧的、舒适的训练环境,并采用大脑信号反馈结合肢体端力反馈的控制方法,实时感知患者对于训练强度的意愿,实时调整训练系统的运动参数,以达到优化训练效果,提升训练效率的目的:
[0041]
(1)、通过捕捉患者自身训练意愿调整训练强度,能够切实契合患者的实际需求;
[0042]
(2)、初期需要专业人士辅助外,在长期的训练中,患者通过脑电反馈可主导训练过程,增强患者参与感,提高训练效率,一定程度上缓解康复医疗人员短缺的社会现状;
[0043]
(3)、由于采用多参数力补偿模型,几乎可以模拟补偿力的任何变化趋势;
[0044]
(4)、机器人具有多个自由度,可多个关节同时进行训练,相较于单自由度的产品具有更高的效率。
附图说明
[0045]
图1为本发明实施例患者使用下肢康复机器人的训练场景示意图。
[0046]
图2为本发明下肢康复机器人训练控制方法的流程图。
[0047]
图3为本发明下肢康复机器人训练控制系统的硬件架构图。
具体实施方式
[0048]
下面结合附图及具体实施例对本发明作进一步详细的说明。
[0049]
本实施例下肢康复机器人共有5个主动关节(如图1所示:
①②③④⑤
),除第一主
动关节
①
用于调整高度外,其余4个主动关节最多可同时支持对髋关节、膝关节、踝关节和脚掌的训练。也即是:第一主动关节
①
用于升降控制;第二主动关节
②
用于髋关节训练;第三主动关节
③
用于膝关节训练;第四主动关节
④
用于踝关节训练;第五主动关节
⑤
用于脚掌训练。患者头戴脑电帽进行训练。通过脑电帽采集患者脑电信号并生成训练水平调整指令,与输入的初始训练等级形成负反馈。
[0050]
参阅图2所示,是本发明下肢康复机器人训练控制方法较佳实施例的作业流程图。
[0051]
步骤s1,采集下肢康复机器人自由态下的运动轨迹并建立所述下肢康复机器人的动力学方程,以测算患者腿部负载。所述下肢康复机器人自由态是指下肢康复机器人不受外力的状态。具体而言:
[0052]
所述动力学方程如下:
[0053][0054]
由于第一主动关节
①
为升降关节,仅用于调整患者接受训练时的操作面高度,不参与动力学运算。上式中的m、b、k分别为6
×
4的三个矩阵,分别表征质量、阻尼和刚度,fe为所述下肢康复机器人所受的外力(六维力/力矩),为机器人末端加装负载,则机器人整体受到的外力与负载的重力相等,记为g。同时对所述动力学方程两侧进行转置,则上述动力学改写为:
[0055][0056]
控制机器人平稳运动,获得n(n>12)组轨迹数据。
[0057]
将所述n组轨迹数据代入上式得到:
[0058][0059]
其中:
[0060][0061][0062]
对方程(3)采用最小二乘法进行辨识,得到:
[0063][0064]
如此,就获得了所述下肢康复机器人动力学方程中的质量m、阻尼b和刚度k。当搭载患者的下肢后,通过所述下肢康复机器人运动轨迹正向计算搭载患者下肢后的负载fe。
[0065]
由于患者在训练中会因为想要避免疼痛、适应姿态等原因,由腿部肌肉牵引施加除腿部重力之外的力,除此之外还有因为下肢康复机器人运动中加减速所造成的对末端支持力的变化,这些均在负载fe的变化上得以体现。因此负载fe作为患者腿部受力的综合情况的体现。
[0066]
步骤s2,手动控制下肢康复机器人运动,结合运动想象脑-机接口,建立脑电反馈与训练强度的映射关系。具体而言:
[0067]
本实施例采用neuroscan的nuapps放大器和脑电帽相连进行数据采集,脑机接口采用bci2000开源平台。bci2000完成特征提取和特征转换。
[0068]
1.特征提取,由两个过滤器组成。由于脑电信号主要分为自发脑电和诱发脑电两种,第一过滤器通过计算输入信号与空间滤波矩阵的矩阵乘法来实现任何线性空间滤波操作,对于自发脑电中的theta波、beta波等健康成年人常见频段进行滤除。第二过滤器为时间过滤器,因为脑电分析中不能持续获取代表大脑正处于激活状态的事件相关去同步化(event-related desynchronization,erd)现象,以及代表大脑正由激活状态转入安静状态的事件相关同步化(event related synchronization,ers)现象,并不是发生在整个信号采集的整个时长,容易提取到无效信息。本实施例采用希尔伯特-黄变换(hht)进行能量特征提取:
[0069]
首先找到滤波后信号中所有局部极大值以及局部极小值,并分别通过三次样条顺序连接成包络线。设原始信号为x(t),上下包络线的均值为m1,则原始信号与包络线的差值记为:
[0070]
h1(t)=x(t)-m1(t)
[0071]
将h1(t)作为原始函数重复如上的过程,直至原始信号与包络线的差值满足imf条件。最后,原始信号可分解为:
[0072][0073]
设定停止条件:
[0074][0075]
sd的阈值设定为0.25,当小于阈值时停止迭代。
[0076]
2.特征转换,患者想象自己腿部进行伸缩、摇摆等康复运动,并通过下肢康复机器人拖动患者腿部使得患者腿部受迫运动,配合采集到的脑电信号特征建立每名患者腿部想象/实际开始运动时的脑电信号特征,所述脑电信号特征作为患者想要开始训练的脑电驱动信息;通过患者想象腿部逐渐停止运动/并实际控制机器人逐渐减速直至带动患者腿部
逐渐停止,记录的特征作为患者想要停止训练的脑电驱动信息。
[0077]
通过手动调整下肢康复机器人的训练强度,从初始的较轻强度逐渐提升至患者承受的极限,最后逐渐降低回最低水平,并实时记录每个时刻患者的脑部信号反馈,建立患者脑部信号与个人训练意愿的映射。具体为:
[0078]
1、获取患者脑电信号特征变化与当前对应时刻的机器人各个关节极限位置,作为患者当前可承受的主动训练在空间上的范围;
[0079]
2、在满足1的范围内逐渐提高速度,和腿部受力,记录极限数值,作为患者当前可承受的主动训练在生理上的范围;
[0080]
3、满足1、2两点的范围内,记录训练时长的极限值;
[0081]
将上述三项试验中的极限数值确定后,则认为超过上述三项极限则患者个人训练意愿减退。
[0082]
步骤s3,停止手动控制,通过测算的患者腿部负载及建立的脑电反馈与训练强度的映射关系设定一个适中的训练水平,通过脑电反馈动态调整训练强度,兼顾患者的适应力、舒适度和训练的效率,记录每次训练达到的训练成果。具体而言:
[0083]
开始自主训练后,通过检测患者想象开始运动的信号特征,控制下肢康复机器人在运动中实时检测患者脑电信号是否由想象开始运动到想象中止运动的特征变化,根据特征实时变化对训练强度(幅度、剩余时长、速度、力度)进行调整,来替代医师经过询问的粗略调整方式。
[0084]
综合上述条件作为患者下一次开始训练的内置设定值,在上述三点的范围内逐渐突破三个方面的极限值,如遇到消极的反馈则退回原有水平,随着训练次数的增加,各项极限值逐渐趋近于患者能够接受的水平。将历史上所有训练中的各项极限值存储下来作为判断后续训练任务强度的数据。
[0085]
对于患者自主训练的不同水平等级的调整体现在为患者腿部提供的阻力或助力,采用七阶有理多项式力补偿模型:
[0086][0087]
所述补偿模型共有8个可调整参数,以适应对于补偿力的灵活变化。
[0088]
在患者训练的初始阶段给定一个适中的训练等级,让患者开始主动训练,由运控系统驱动下肢康复机器人带负载运行(负载为患者的下肢),输出信号为当前患者下肢(机器人对应关节)的关节空间坐标、角速度以及角加速度,所述输出信号经由患者脑部的反馈产生肌电信号。
[0089]
步骤s4,根据每次训练达到的训练成果制定下次训练开始时的初始训练水平。具体而言:
[0090]
根据运动幅度、时长、速度和力度评估,若上次康复运动中上述各项指标相对历史数据的均值有明显的变化,则将训练的这个四个强度均向变化的方向进行微调;若四个强度指标没有发生明显变化甚至出现指标降低的趋势,则稳定于上一次的指标进行康复训练,只接受过程中的脑电控制微调。
[0091]
参阅图3所示,是本发明下肢康复机器人训练控制系统10的硬件架构图。该系统包括:负载测算模块101、映射关系模块102、训练设定模块103、训练计划模块104。
[0092]
所述负载测算模块101用于采集下肢康复机器人自由态下的运动轨迹并建立所述
下肢康复机器人的动力学方程,以测算患者腿部负载。所述下肢康复机器人自由态是指下肢康复机器人不受外力的状态。具体而言:
[0093]
所述动力学方程如下:
[0094][0095]
由于第一主动关节
①
为升降关节,仅用于调整患者接受训练时的操作面高度,不参与动力学运算。上式中的m、b、k分别为6
×
4的三个矩阵,分别表征质量、阻尼和刚度,fe为所述下肢康复机器人所受的外力(六维力/力矩),为机器人末端加装负载,则机器人整体受到的外力与负载的重力相等,记为g。同时对所述动力学方程两侧进行转置,则上述动力学改写为:
[0096][0097]
控制机器人平稳运动,获得n(n>12)组轨迹数据。
[0098]
将所述n组轨迹数据代入上式得到:
[0099][0100]
其中:
[0101][0102][0103]
对方程(3)采用最小二乘法进行辨识,得到:
[0104][0105]
如此,就获得了所述下肢康复机器人动力学方程中的质量m、阻尼b和刚度k。当搭载患者的下肢后,通过所述下肢康复机器人运动轨迹正向计算搭载患者下肢后的负载fe。
[0106]
由于患者在训练中会因为想要避免疼痛、适应姿态等原因,由腿部肌肉牵引施加除腿部重力之外的力,除此之外还有因为下肢康复机器人运动中加减速所造成的对末端支持力的变化,这些均在负载fe的变化上得以体现。因此负载fe作为患者腿部受力的综合情况
的体现。
[0107]
所述映射关系模块102用于在手动控制下肢康复机器人运动时,结合运动想象脑-机接口,建立脑电反馈与训练强度的映射关系。具体而言:
[0108]
本实施例采用neuroscan的nuapps放大器和脑电帽相连进行数据采集,脑机接口采用bci2000开源平台。bci2000完成特征提取和特征转换。
[0109]
1.特征提取,由两个过滤器组成。由于脑电信号主要分为自发脑电和诱发脑电两种,第一过滤器通过计算输入信号与空间滤波矩阵的矩阵乘法来实现任何线性空间滤波操作,对于自发脑电中的theta波、beta波等健康成年人常见频段进行滤除。第二过滤器为时间过滤器,因为脑电分析中不能持续获取代表大脑正处于激活状态的事件相关去同步化(event-related desynchronization,erd)现象,以及代表大脑正由激活状态转入安静状态的事件相关同步化(event related synchronization,ers)现象,并不是发生在整个信号采集的整个时长,容易提取到无效信息。本实施例采用希尔伯特-黄变换(hht)进行能量特征提取:
[0110]
首先找到滤波后信号中所有局部极大值以及局部极小值,并分别通过三次样条顺序连接成包络线。设原始信号为x(t),上下包络线的均值为m1,则原始信号与包络线的差值记为:
[0111]
h1(t)=x(t)-m1(t)
[0112]
将h1(t)作为原始函数重复如上的过程,直至原始信号与包络线的差值满足imf条件。最后,原始信号可分解为:
[0113][0114]
设定停止条件:
[0115][0116]
sd的阈值设定为0.25,当小于阈值时停止迭代。
[0117]
2.特征转换,患者想象自己腿部进行伸缩、摇摆等康复运动,并通过下肢康复机器人拖动患者腿部使得患者腿部受迫运动,配合采集到的脑电信号特征建立每名患者腿部想象/实际开始运动时的脑电信号特征,所述脑电信号特征作为患者想要开始训练的脑电驱动信息;通过患者想象腿部逐渐停止运动/并实际控制机器人逐渐减速直至带动患者腿部逐渐停止,记录的特征作为患者想要停止训练的脑电驱动信息。
[0118]
通过手动调整下肢康复机器人的训练强度,从初始的较轻强度逐渐提升至患者承受的极限,最后逐渐降低回最低水平,并实时记录每个时刻患者的脑部信号反馈,建立患者脑部信号与个人训练意愿的映射。具体为:
[0119]
1、获取患者脑电信号特征变化与当前对应时刻的机器人各个关节极限位置,作为患者当前可承受的主动训练在空间上的范围;
[0120]
2、在满足1的范围内逐渐提高速度,和腿部受力,记录极限数值,作为患者当前可承受的主动训练在生理上的范围;
[0121]
3、满足1、2两点的范围内,记录训练时长的极限值;
[0122]
将上述三项试验中的极限数值确定后,则认为超过上述三项极限则患者个人训练意愿减退。
[0123]
所述训练设定模块103用于停止手动控制时,通过测算的患者腿部负载及建立的脑电反馈与训练强度的映射关系设定一个适中的训练水平,通过脑电反馈动态调整训练强度,兼顾患者的适应力、舒适度和训练的效率,记录每次训练达到的训练成果。具体而言:
[0124]
开始自主训练后,通过检测患者想象开始运动的信号特征,所述训练设定模块103控制下肢康复机器人在运动中实时检测患者脑电信号是否由想象开始运动到想象中止运动的特征变化,根据特征实时变化对训练强度(幅度、剩余时长、速度、力度)进行调整,来替代医师经过询问的粗略调整方式。
[0125]
综合上述条件作为患者下一次开始训练的内置设定值,在上述三点的范围内逐渐突破三个方面的极限值,如遇到消极的反馈则退回原有水平,随着训练次数的增加,各项极限值逐渐趋近于患者能够接受的水平。将历史上所有训练中的各项极限值存储下来作为判断后续训练任务强度的数据。
[0126]
对于患者自主训练的不同水平等级的调整体现在为患者腿部提供的阻力或助力,采用七阶有理多项式力补偿模型:
[0127][0128]
所述补偿模型共有8个可调整参数,以适应对于补偿力的灵活变化。
[0129]
在患者训练的初始阶段给定一个适中的训练等级,让患者开始主动训练,由运控系统驱动下肢康复机器人带负载运行(负载为患者的下肢),输出信号为当前患者下肢(机器人对应关节)的关节空间坐标、角速度以及角加速度,所述输出信号经由患者脑部的反馈产生肌电信号。
[0130]
所述训练计划模块104用于根据每次训练达到的训练成果制定下次训练开始时的初始训练水平。具体而言:
[0131]
所述训练计划模块104根据运动幅度、时长、速度和力度评估,若上次康复运动中上述各项指标相对历史数据的均值有明显的变化,则将训练的这个四个强度均向变化的方向进行微调;若四个强度指标没有发生明显变化甚至出现指标降低的趋势,则稳定于上一次的指标进行康复训练,只接受过程中的脑电控制微调。
[0132]
本发明通过实时采集脑部肌电信号,获得患者对于当前训练强度的反馈信息,针对性调整主动训练时系统的阻力;同时为运动机能水平不同的患者建立数据库,在多次康复训练的中逐渐修正数据库中所储存的参数为患者,为患者的训练提供依据。
[0133]
虽然本发明参照当前的较佳实施方式进行了描述,但本领域的技术人员应能理解,上述较佳实施方式仅用来说明本发明,并非用来限定本发明的保护范围,任何在本发明的精神和原则范围之内,所做的任何修饰、等效替换、改进等,均应包含在本发明的权利保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1