一种人工呼吸气囊自动按压器的制作方法
1.本发明涉及医疗辅助设备技术领域,具体为一种人工呼吸气囊自动按压 器。
背景技术:
2.急救呼吸气囊是面罩、单向阀、球体、氧气储气阀组成的,其作用是维 持和增加机体通气量,纠正威胁生命的低氧血量,医院在对自主呼吸困难的 病人急救过程中,一般使用急救呼气气囊作为临时通气设备以辅助患者呼吸, 使用时将呼吸气囊出气端与呼吸面罩相接,用手挤压呼吸气囊,将囊内气体 吹入病人肺内,当松开呼吸气囊时,病人的肺脏被动收缩,将肺内气体呼出, 呼吸气囊内有弹性塑料,在未加压时能自动膨起并吸入新鲜空气,以备下次 挤压所用。
3.现有的急救呼吸气囊通常采用人工不断用手挤压的方式对患者进行呼吸 急救,这就导致在实际使用时医护人员的劳动强度较高,进而导致医护人员 对患者进行就值得过程中易感到乏累,从而导致急救效果较差,因此需要一 种人工呼吸气囊自动按压器对上述问题做出改善。
技术实现要素:
4.本发明的目的在于提供一种人工呼吸气囊自动按压器,以解决上述背景 技术中提出的问题。
5.为实现上述目的,本发明提供如下技术方案:
6.一种人工呼吸气囊自动按压器,包括安装板,所述安装板的底部的右侧 安装有驱动器,所述安装板的底部并且位于驱动器的左侧安装有控制器,所 述安装板的底部并且位于控制器的左侧安装有锂电池,所述安装板基面的左 侧中间处安装有步进电机,所述安装板的基面并且位于步进电机的左侧安装 有安装分隔板,所述安装板的左侧端部安装有底部固定板,所述安装分隔板 的左侧中间处安装有联轴器,所述底部固定板基面的边缘处安装有侧面固定 板,所述侧面固定板的左侧对称安装有齿轮轴,所述齿轮轴的左侧对称安装 有摆动臂,所述摆动臂端部的内侧安装有聚氨酯垫,所述聚氨酯垫之间安装 有气囊组件。
7.优选的,所述锂电池通过导线分别与驱动器、控制器和步进电机电性连 接,所述驱动器、控制器均通过导线与步进电机电性连接。
8.优选的,所述步进电机通过电机主轴与联轴器进行连接。
9.优选的,所述相邻侧面固定板之间通过m6内六角螺钉进行连接。
10.优选的,所述齿轮轴包括主动轴与从动轴,并且所述主动轴与联轴器进 行连接,所述主动轴、从动轴分别与两侧的摆动臂进行连接,所述主动轴与 从动轴相互啮合连接。
11.优选的,所述步进电机通过m6内六角螺钉与安装分隔板进行连接。
12.与现有技术相比,本发明的有益效果是:
13.本发明中,通过设置的步进电机、齿轮轴与摆动臂等结构配合使用可在 实际使用过程中自动对气囊组件进行反复按压,进而降低了医护人员的劳动 强度,另外,控制器与
驱动器的加入可对步进电机进行较为精准的控制,使 得摆动臂摆动的幅度与频率与排气量均可根据实际需求进行控制,整体来说 本装置可通过电动的方式对气囊组件进行按压,省去了人工按压的步骤,进 而使得本装置的实用性与适应性更强。
14.采用步进电机,步进电机是通过输入脉冲信号来进行控制,电机的总转 动角度由输入脉冲数决定,而电机的转速由脉冲信号频率决定,避免了传统 机械传动驱动机构复杂的缺点,它具有电机惯量低、定位精度高、无累积误 差、控制简单等特点,简化了设备构造,增加了驱动的灵敏性和精度。
15.mcs
‑
51系列单片机是目前8位微机中性价比最高,采用单片机进行控制, 抗干扰性能好,稳定性强可靠性高,可维护性能也很好,相对于传统的工控 机而言,单片机成本低廉,对操作维护人员的要求不高,便于推广利用;
16.结构简单,工作可靠,采用金属直齿轮配合,强度高,加工方便,紧凑 传动,传动功率、效率较高,传动比准确,抗污染能力强。
17.采用锂电池供电,携带方便,能量比较高,使用寿命长,使用寿命可达到 6年以上,额定电压高,具备高功率承受力,自放电率很低,这是该电池最突 出的优越性之一。
18.按压气囊采用聚氨酯垫,采用贴合气囊外形的造型设计,接触面积大, 且聚氨酯有强度高、耐磨、耐油、耐臭氧性能优良等优点。
19.在保证强度的前提下,摆动臂及连接板等零件均采用铝合金材料,质量 轻,使得设备易于携带。
20.人性化设计,按键均采用按压机械按键,操作人员在戴手套的情况下也 易于操作。
21.设备价格低廉、生产周期短,但满足大部分呼吸机的功能。
附图说明
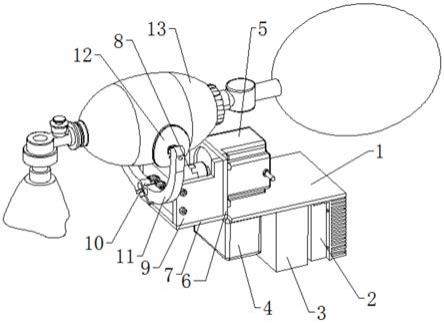
22.图1为本发明整体立体图;
23.图2为本发明整体俯视图;
24.图3为本发明整体左视图。
25.图中:1
‑
安装板、2
‑
驱动器、3
‑
控制器、4
‑
锂电池、5
‑
步进电机、6
‑
安 装分隔板、7
‑
底部固定板、8
‑
联轴器、9
‑
侧面固定板、10
‑
齿轮轴、11
‑
摆动 臂、12
‑
聚氨酯垫、13
‑
气囊组件。
26.图4是该四相反应式步进电机工作原理示意图;
27.图5步进电机工作时序波形图
28.图6本发明工作流程图
具体实施方式
29.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行 清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而 不是全部的实施例,基于本发明中的实施例,本领域普通技术人员在没有做出 创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
30.请参阅图1
‑
3,本发明提供一种技术方案:
31.一种人工呼吸气囊自动按压器,包括安装板1,安装板1的底部的右侧安 装有驱动器2,安装板1的底部并且位于驱动器2的左侧安装有控制器3,安 装板1的底部并且位于控制器3的左侧安装有锂电池4,安装板1基面的左侧 中间处安装有步进电机5,安装板1的基面并且位于步进电机5的左侧安装有 安装分隔板6,安装板1的左侧端部安装有底部固定板7,安装分隔板6的左 侧中间处安装有联轴器8,底部固定板7基面的边缘处安装有侧面固定板9, 侧面固定板9的左侧对称安装有齿轮轴10,齿轮轴10的左侧对称安装有摆动 臂11,摆动臂11端部的内侧安装有聚氨酯垫12,聚氨酯垫12之间安装有气 囊组件13,锂电池4通过导线分别与驱动器2、控制器3和步进电机5电性 连接,驱动器2、控制器3均通过导线与步进电机5电性连接,步进电机5通 过电机主轴与联轴器8进行连接,相邻侧面固定板9之间通过m6内六角螺钉 进行连接,齿轮轴10包括主动轴与从动轴,并且主动轴与联轴器8进行连接, 主动轴、从动轴分别与两侧的摆动臂11进行连接,主动轴与从动轴相互啮合 连接,步进电机5通过m6内六角螺钉与安装分隔板6进行连接,步进电机5、 齿轮轴10与摆动臂11等结构配合使用可在实际使用过程中自动对气囊组件 13进行反复按压,进而降低了医护人员的劳动强度,另外,控制器3与驱动 器2的加入可对步进电机5进行较为精准的控制,使得摆动臂11摆动的幅度 与频率与排气量均可根据实际需求进行控制,整体来说本装置可通过电动的 方式对气囊组件13进行按压,省去了人工按压的步骤,进而使得本装置的实 用性与适应性更强。
32.本发明工作流程:使用时,将本装置放置在适当的位置,之后启动本装 置,步进电机5通过电机主轴带动联轴器8进行转动,联轴器8带动齿轮轴 10进行转动,齿轮轴10带动摆动臂11进行开合,摆动臂11带动聚氨酯垫 12进行同步摆动,聚氨酯垫12摆动的过程中对气囊组件13的气囊进行反复 按压,从而实现气囊组件13对患者进行供氧,步进电机5、齿轮轴10与摆动 臂11等结构配合使用可在实际使用过程中自动对气囊组件13进行反复按压, 进而降低了医护人员的劳动强度,另外,控制器3与驱动器2的加入可对步 进电机5进行较为精准的控制,使得摆动臂11摆动的幅度与频率与排气量均 可根据实际需求进行控制,整体来说本装置可通过电动的方式对气囊组件13 进行按压,省去了人工按压的步骤,进而使得本装置的实用性与适应性更强。
33.步进电机5内具有单片机和步进电机驱动器,步进电机是通过输入脉冲 信号来进行控制,电机的总转动角度由输入脉冲数决定,而电机的转速由脉 冲信号频率决定,通过控制输入脉冲信号实现对调频和调幅的控制,可以调 节三个档位的频率,通过单片机中的程序控制三个档位的频率,1挡:10次/ 分钟;2挡:16次/分钟;3挡:25次/分钟;通过单片机中的程序控制三个 档位的幅度,摆动臂夹角分别为:轻度:58
°
中度:43
°
重度:28。
34.该步进电机为一四相步进电机,采用单极性直流电源供电。
35.只要对步进电机的各相绕组按合适的时序通电,就能使步进电机步进转 动。
36.开始时,开关sb接通电源,sa、sc、sd断开,b相磁极和转子0、3
37.号齿对齐,同时,转子的1、4号齿就和c、d相绕组磁极产生错齿,2、5号齿就和d、a相绕组磁极产生错齿。当开关sc接通电源,sb、sa、sd断 开时,由于c相绕组的磁力线和1、4号齿之间磁力线的作用,使转子转动, 1、4号齿和c相绕组的磁极对齐。而0、3号齿和a、b
38.相绕组产生错齿,2、5号齿就和a、d相绕组磁极产生错齿。依次类推, a、b、c、d四相绕组轮流供电,则转子会沿着a、b、c、d方向转动。
39.四相步进电机按照通电顺序的不同,可分为单四拍、双四拍、八拍三种 工作方式。单四拍与双四拍的步距角步进电动机的步距角是指步进电动机的 定子控制绕组每改变一次通电方式,对应电动机转子所转过的空间角度(称为 步距角)相等,但单四拍的转动力矩小。八拍工作方式的步距角是单四拍与 双四拍的一半,因此,八拍工作方式既可以保持较高的转动力矩又可以提高 控制精度。单四拍、双四拍与八拍工作方式的电源通电时序与波形分别如图 5.a、b、c所示:a.单四拍、b.双四拍、c.八拍。
40.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而 言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行 多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限 定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1