一种应用于动态运动追踪的成像设备的制作方法
1.本发明涉及医学成像技术领域,尤其涉及运动追踪医学成像技术领域。具体为一种应用于动态运动追踪的成像设备。
背景技术:
2.目前在门诊与手术中,越来越多的会使用到医学成像设备对人体进行成像的方法来发现人体体内的病灶。然而,现有的医学成像设备,一般来说,都是对静止的人体进行成像。针对于人体运动障碍等问题无法通过现有的医学成像设备进行拍摄。
3.举个例子来说,当人体的膝盖关节发生运动障碍时,通过现有的医学成像设备,只能捕捉到瞬间静止的影像。由于只有在膝盖关节不断运动中才能够发现膝盖关节是否有运动障碍,静止的影像无法实现上述功能。此时,只能依赖于医生的经验去观察判断患者膝盖关节是否有运动障碍,对医生的专业度要求很高,且耗时耗力,也极有可能出现判断不准确的情况。
4.在“cn102065770b—x射线ct装置”中公开了一种在心脏等周期性运动的脏器的摄影下可有效地设定摄影条件的x射线ct装置,具体为:“具备:x射线源,其照射x射线;x射线检测器,其隔着被检体与所述x射线源对置配置,检测透过被检体后的x射线量;支架,其搭载所述x射线源和所述x射线检测器,能够绕被检体的周围旋转;床,其能够在承载被检体的情况下移动;控制装置,其控制所述x射线源、所述x射线检测器、所述支架和所述床;周期运动测量装置,其测量被检体的周期运动;图像处理装置,其基于所述x射线量的数据及所述周期运动的数据,生成所述周期运动的任意相位下的被检体的重构图像;显示装置,其显示所述重构图像;以及摄影条件计算机构,其根据所述周期运动的数据来计算所述周期运动的周期,将所述重构图像的时间分辨率与所述周期之比即时间分辨率比率作为指标,来计算摄影条件”上述现有技术中公开的方案主要用于心脏搏动的周期运动,对于比如说上述举例中的膝盖关节等的运动幅度比较大的运动无法进行拍摄。
5.综上所述,在现有技术的成像设备中,无法对运动幅度大的运动进行连续的跟踪拍摄,以快速发现运动障碍问题。
技术实现要素:
6.针对上述问题,本发明的目的在于提供一种应用于动态运动追踪的成像设备,具有能够对运动幅度较大的运动进行连续的追踪拍摄,捕获到运动的实时位置,以将整个动态运动的过程全部拍摄下来的优点。
7.本发明的上述发明目的是通过以下技术方案得以实现的:
8.一种应用于动态运动追踪的成像设备,包括:运动捕获机构、运动控制机构和成像机构;
9.所述运动捕获机构,用于捕获运动部位在三维坐标系中的实时运动坐标;
10.所述运动控制机构,用于根据所述运动捕获机构捕获的所述实时运动坐标,控制
所述成像机构跟随所述运动部位做同步的往返运动,以使所述成像机构拍摄到所述运动部位;
11.所述成像机构,用于对所述运动部位进行实时的拍摄。
12.进一步地,所述运动捕获机构,具体包括:跟踪标签、标签摄像机;
13.所述跟踪标签,用于附在所述运动部位上,标记所述运动部位的位置;
14.所述标签摄像机,用于实时捕获所述跟踪标签的位置,进而推导出所述运动部位在所述三维坐标系中的所述实时运动坐标。
15.进一步地,所述跟踪标签,具体为:红外线标签;
16.进一步地,所述标签摄像机,具体为:红外摄像机。
17.进一步地,所述运动控制机构,具体为:运动电机;
18.所述运动电机,用于控制所述成像机构在x轴、y轴、z轴上做往返运动,以使所述成像机构跟随所述运动部位做同步的往返运动。
19.进一步地,所述成像机构,具体包括:正面成像单元和侧面成像单元;
20.所述正面成像单元与所述侧面成像单元,成正交状态,同时拍摄所述运动部位正面和侧面的动态影像。
21.进一步地,所述正面成像单元,包括正面发射端和正面接收端,所述正面发射端与所述正面接收端相对设置,运动时保持所述正面发射端与所述正面接收端水平,确保所述正面发射端发出的射线被所述正面接收端接收;
22.进一步地,所述侧面成像单元,包括侧面发射端和侧面接收端,所述侧面发射端与所述侧面接收端相对设置,运动时保持所述侧面发射端与所述侧面接收端水平,确保所述侧面发射端发出的射线被所述侧面接收端接收。
23.进一步地,所述运动电机,具体包括:x轴移动电机、y轴移动电机和z轴移动电机;
24.所述x轴移动电机,用于控制所述侧面发射端和所述侧面接收端在x轴上做往返运动;
25.所述y轴移动电机,用于控制所述正面发射端和所述正面接收端在y轴上做往返运动;
26.所述z轴移动电机,用于控制所述正面发射端和所述正面接收端,以及所述侧面发射端和所述侧面接收端在z轴上做往返运动。
27.进一步地,包括所述正面发射端与所述侧面发射端在内的发射端,具备脉冲模式;包括所述正面接收端与所述侧面接收端在内接收端,兼容动态模式。
28.进一步地,动态采图机构,用于采集所述成像机构拍摄的所述运动部位的动态影像。
29.进一步地,三维重建机构,用于根据所述动态采图机构采集到的正面和侧面的动态影像,结合三维重建技术获取所述运动部位的三维运动影像。
30.与现有技术相比,本发明的有益效果是:
31.(1)通过提供一种应用于动态运动追踪的成像设备,包括:运动捕获机构、运动控制机构和成像机构;所述运动捕获机构,用于捕获运动部位在三维坐标系中的实时运动坐标;所述运动控制机构,用于根据所述运动捕获机构捕获的所述实时运动坐标,控制所述成像机构跟随所述运动部位做同步的往返运动,以使所述成像机构拍摄到所述运动部位;所
述成像机构,用于对所述运动部位进行实时的拍摄。上述技术方案能够拍摄到运动部位动态连续变换的图像,捕捉到运动部位的实时位置,反馈到成像机构,成像机构的发射端和接收端跟随运动部位实时移动,以利于将整个动态过程全部拍摄下来。
32.(2)通过设置包括正面成像单元和侧面成像单元在内的两个成像单元,能够同时获取到运动部位的正面和侧面的影像。进一步地,可以利用三维重建技术,重建出运动部位的三维影像。
附图说明
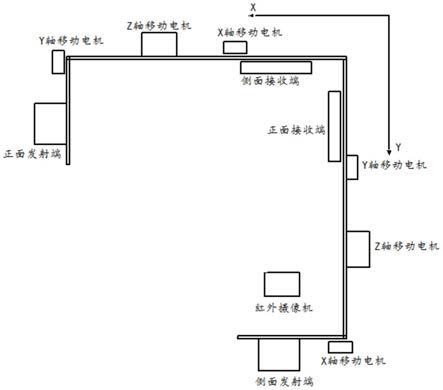
33.图1为本发明一种应用于动态运动追踪的成像设备的整体结构图。
具体实施方式
34.除非另作定义,在本说明书和权利要求书中使用的技术术语或者科学术语应当为本发明所属技术领域内具有一般技能的人士所理解的通常意义。
35.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
36.此外,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”等的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上。
37.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以通过具体情况理解上述术语在本发明中的具体含义。
38.下面将参考附图并结合实施例来详细说明本发明。需要指出的是,在这些实施方式的具体描述过程中,为了进行简明扼要的描述,本说明书不可能对实际的实施方式的所有特征均作详尽的描述。
39.实施例
40.如图1所示,本发明提供了一种应用于动态运动追踪的成像设备,包括:运动捕获机构、运动控制机构和成像机构;
41.所述运动捕获机构,用于捕获运动部位在三维坐标系中的实时运动坐标;所述运动控制机构,用于根据所述运动捕获机构捕获的所述实时运动坐标,控制所述成像机构跟随所述运动部位做同步的往返运动,以使所述成像机构拍摄到所述运动部位;所述成像机构,用于对所述运动部位进行实时的拍摄。
42.具体地,在本实施例中,首先,通过运动捕获机构实时捕捉运动部位的具体位置,通过具体位置计算出在三维坐标系中每个坐标的位置,也即是运动部位相对于成像设备的
坐标信息。其次,在获取到运动部位的坐标信息之后,运动控制机构根据坐标信息控制成像机构跟随运动部位移动,确保成像机构能够始终拍摄到运动部位。最后,使用成像机构不断拍摄运动中的运动部位。
43.其中,运动部位可以是人体甚至是动物的任意一个运动部位。一个最典型的例子是人体的关节运动,通过本发明的成像设备可以跟踪关节的运动。
44.在一种实施例中,所述运动捕获机构,具体包括:跟踪标签、标签摄像机;所述跟踪标签,用于附在所述运动部位上,标记所述运动部位的位置;所述标签摄像机,用于实时捕获所述跟踪标签的位置,进而推导出所述运动部位在所述三维坐标系中的所述实时运动坐标。
45.通过在运动部位上贴上跟踪标签,当捕捉到跟踪标签的位置时,也即捕捉到运动部位的位置。捕捉跟踪标签可以采用摄像机进行拍摄。
46.在一种优选方案中,所述跟踪标签,具体为:红外线标签;所述标签摄像机,具体为:红外摄像机。当然也可以采用其他的光学成像设备配合跟踪运动部位。
47.在一种实施例中,所述运动控制机构,具体为:运动电机;所述运动电机,用于控制所述成像机构在x轴、y轴、z轴上做往返运动,以使所述成像机构跟随所述运动部位做同步的往返运动。
48.进一步地,所述成像机构,具体包括:正面成像单元和侧面成像单元;
49.所述正面成像单元与所述侧面成像单元,成正交状态,同时拍摄所述运动部位正面和侧面的动态影像。以利于后续根据正面和侧面的影像通过三维重建技术计算出运动部位的三维影像。
50.进一步地,所述正面成像单元,包括正面发射端和正面接收端,所述正面发射端与所述正面接收端相对设置,运动时保持所述正面发射端与所述正面接收端水平,确保所述正面发射端发出的射线被所述正面接收端接收;所述侧面成像单元,包括侧面发射端和侧面接收端,所述侧面发射端与所述侧面接收端相对设置,运动时保持所述侧面发射端与所述侧面接收端水平,确保所述侧面发射端发出的射线被所述侧面接收端接收。
51.进一步地,为了实现成像机构在xyz三个方向上任意移动,所述运动电机,具体包括:x轴移动电机、y轴移动电机和z轴移动电机;所述x轴移动电机,用于控制所述侧面发射端和所述侧面接收端在x轴上做往返运动;所述y轴移动电机,用于控制所述正面发射端和所述正面接收端在y轴上做往返运动;所述z轴移动电机,用于控制所述正面发射端和所述正面接收端,以及所述侧面发射端和所述侧面接收端在z轴上做往返运动。
52.进一步地,包括所述正面发射端与所述侧面发射端在内的发射端,具备脉冲模式;包括所述正面接收端与所述侧面接收端在内接收端,兼容动态模式。
53.进一步地,本发明还包括了动态采图机构,用于采集所述成像机构拍摄的所述运动部位的动态影像。以利于后续的输出显示,以及三维成像。
54.进一步地,本发明还包括了三维重建机构,用于根据所述动态采图机构采集到的正面和侧面的动态影像,结合三维重建技术获取所述运动部位的三维运动影像。
55.以关节为例,本发明具体的工作流程为:
56.(1)在关节附近附上红外线的跟踪标签;
57.(2)利用红外摄像机实时捕捉跟踪标签的位置;
58.(3)利用跟踪标签的实时位置推算出关节的位置;
59.(4)利用关节位置计算出关节在三维坐标轴中每个坐标的位置(x、y、z轴的位置);
60.(5)根据坐标位置实时控制每个坐标轴上的运动电机;其中,所述x轴移动电机,用于控制所述侧面发射端和所述侧面接收端在x轴上做往返运动;所述y轴移动电机,用于控制所述正面发射端和所述正面接收端在y轴上做往返运动;所述z轴移动电机,用于控制所述正面发射端和所述正面接收端,以及所述侧面发射端和所述侧面接收端在z轴上做往返运动;
61.(6)运动电机控制发射端和接收端做往返运动,实时跟踪关节位置;
62.(7)利用成正交状态的成像机构及动态采图设备,同时获取关节正侧位的动态影像;
63.(8)结合三维重建技术可获取关节的三维运动。
64.以上所述仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1