一种基于Scheimpflug眼前节形态的屈光度精准评估的方法和应用与流程
一种基于scheimpflug眼前节形态的屈光度精准评估的方法和应用
技术领域
1.本发明属于眼科医疗诊断技术领域,涉及机器学习技术,尤其是一种基于scheimpflug眼前节形态的屈光度精准评估的方法和应用。
背景技术:
2.屈光度(d)作为屈光力的单位是评价屈光不正(近视、远视、散光)的重要参考,其测量是一个动态的、多程序的过程,是屈光不正临床诊断和矫正的重要参考,方法主要是依靠验光,包括主觉验光以及客观(检影和电脑)验光。目前临床中验光方法众多,其原理主要是基于通过视网膜反射红外光线的清晰度来计算屈光度的电脑验光和通过调试透镜组获得屈光度的主觉验光。但电脑验光过程中要求被检者注视光标,诱发调节导致近视过矫、远视欠矫以及影响散光。虽然存在自动雾视功能,一定程度上避免了检查时的影响因素,更便捷高效,但由于人眼调节的不稳定、机器的设计原理不同、患者检查时的周边环境、光照等因素影响,始终存在屈光度评估不准确情况。同时,主觉验光耗时长,需要患者高度配合尤其儿童患者自身感知和表达存在差异,以及要求检查者需要有丰富临床经验等因素常导致难以获得相对精准的结果。为降低人眼调节能力强且极不稳定的影响,临床通常采用睫状肌麻痹(散瞳)验光来获取相对精准的屈光度。由于该方法必须要在相关医疗机构开展,同时散大被检查者的瞳孔,会因影响调节能力而造成短期内视近不清影响正常生活,在大规模的视力普查任务中可操作性不强。
3.角膜地形图检查能够提供关于眼前节形态的众多特征,包括角膜曲率、角膜厚度、前房、像差等在临床中广泛应用。但因其机器设计原理,尚无法获得患者全眼的准确屈光度。角膜作为人眼主要的屈光介质其屈光力约占全眼屈光度的2/3,而scheimpflug角膜地形图又称眼前节系统,可全面反映眼前节的众多参数,与人眼调节也存在可能的内在关联,充分利用其相关参数并结合快捷的客观电脑验光,借助机器学习方法挖掘其内在关系,或可以精准评估人眼实际屈光度,并在一定程度上解放验光师,从而提升临床诊疗效率。
4.以往关于提高电脑验光测量结果的方法主要是基于图像滤波处理等优化增强技术去除噪音,使采集的图像更清晰准确,提高计算准确度从而提高测量结果,但均是以模型眼作为评估标准,忽略了实际人眼存在的调节作用,且未与主觉验光结果比较。而随着机器学习等人工智能技术的成熟和应用,特别的,极值梯度提升模型(xgboost)算法在脑卒中、肿瘤、糖尿病等临床疾病的预测和诊断任务中均证实了极高的性能。有研究也借助该方法基于人眼的波前像差参数计算主觉验光结果,虽取得一定效果,但目前各种对像差测量方法的前提是基于单一波长的单色光,所测的像差实际为单色像差。而测量屈光度时,白光进入人眼被分解为不同波长的光,各自产生不同的像差,即波前色差。不同波长的光产生不同的结果,特别是对于近视这样的低阶像差影响更大,对于整个可见光范围测出的屈光差可能达到2.00d,测量过程需要特定环境,受外界因素影响较大。同时,基于视网膜检影双程技术的像差仪(opd
‑
scanⅲ)仅采集到角膜前表面形态,无法反应人眼注视时眼前节形态的变
化特征。本发明基于scheimpflug眼前节分析系统(pentacam)采集包含人眼像差在内的更多眼前节相关参数(角膜前后表面形态、前房等)更全面获取注视动态下的特征来拟合主觉验光结果。且该项检查方法在我国眼科临床诊疗中的应用广泛,涉及儿童、青少年以及众多屈光不正患者,更具普及推广意义。
5.通过检索,尚未发现与本发明专利申请相关的专利公开文献。
技术实现要素:
6.本发明的目的在于克服现有技术的临床现有诊断技术中屈光度测量不够精准、不够便捷、不够高效的不足之处,提供一种基于scheimpflug眼前节形态的屈光度精准评估的方法和应用。
7.本发明解决其技术问题所采用的技术方案是:
8.一种基于scheimpflug眼前节形态的屈光度精准评估的方法,步骤如下:
9.步骤1:采集患者客观电脑验光数据以及眼前节数据特征,作为模型学习训练使用的特征,以主觉验光数据作为标签特征;
10.步骤2:对数据集进行划分,使用十折交叉验证的方法得到训练集和验证集;
11.步骤3:初始化模型f0(x),为只有一个根节点的树,使用均方根误差rmse,数据集中,x
i
为第i个样本,n为样本量,y
i
∈r;
12.步骤4:在上一模型f0(x)损失函数梯度下降方向上建立模型,所述模型构建采用的梯度提升算法xgboost,具体步骤如下:
13.⑴
对于每一个节点,计算所有特征以及选择不同划分点的gain值;
14.⑵
选择gain值最大的特征以及划分点将该节点的数据集分成两部分,直到满足停止条件,即gain值小于阈值或者达到最大树的高度;
15.⑶
用得到的新cart树更新模型f
m
=f
m
‑1+f
t
;
16.⑷
重复执行步骤
⑵
,直至迭代次数达到设定的迭代数t;
17.⑸
得到最终回归模型f
m
:
18.其中,xgboost采用网格化搜索调节的参数,设置如下:
19.迭代次数设置为500并使用早停止,树的最大深度为2,每棵树特征下采样率为0.8,每个节点特征下采样率为0.9,学习率0.05。
20.而且,所述步骤1中模型学习使用的特征包括客观电脑验光、形态参数、眼前节数据,并对客观电脑验光、眼前节数据匹配标注。
21.而且,所述形态参数包括角膜散光、角膜曲率、角膜非球面参数、角膜偏心值、角膜像差;
22.所述眼前节数据包括前房容积。
23.而且,所述步骤2中利用交叉验证方法对数据集划分并对模型性能验证,即将数据集随机均匀分为10组,每次选1组作为验证集,其余几组作为训练集,并按该十折交叉验证的方法对模型进行训练。
24.如上所述的基于scheimpflug眼前节形态的屈光度精准评估的方法在屈光度检测方面中的应用。
25.如上所述的基于scheimpflug眼前节形态的屈光度精准评估的方法在视力筛查和/或近视防控方面和/或视力临床矫正中的应用。
26.本发明取得的优点和积极效果为:
27.1、本发明提出的基于scheimpflug眼前节形态参数借助机器学习技术在非散瞳状态下精准评估屈光度的方法,解决了目前儿童及青少年视力筛查和临床矫正工作中,由于涉及人群大、耗时长、要求高等条件限制造成的数据获取准确度不足的瓶颈问题。
28.2、本发明方法使患者能够实现在接受一次眼前节检查获得角膜形态参数及眼前节各种参数等的同时获得精准屈光度,可节省临床诊疗过程中主觉验光的流程,并在一定程度上解放验光师,提升临床工作效率和准确度,缩减了患者就诊时间。
29.3、本发明方法将xgboost算法应用到屈光度的精准评估任务,针对具体应用实例进行了有效的总体方案设计、流程优化及算法参数设置。通过大量临床实例测试,其评估准确度已达到临床应用标准。
30.4、本发明方法能够实现在非散瞳条件下精准评估患者屈光度,可应用于社区或校园的筛查以及医院临床诊疗场景。能够解决视力筛查工作中,由于人群大、耗时长、要求高等条件限制造成的数据获取准确度不足的瓶颈问题。并克服目前临床工作中屈光度测量不够便捷的问题,在一定程度上解放验光师,提升工作效率和准确度,缩减患者就诊时间。
31.5、本发明方法借助机器学习极值梯度提升(xgboost)模型,该技术具有学习、泛化能力强,可自动处理缺失值等优势,对角膜形态参数和客观电脑验光结果综合分析,构建智能化屈光度精准评估模型,为临床提供高效、精准的辅助工具。
附图说明
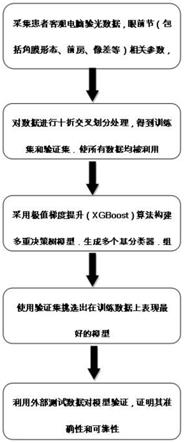
32.图1为本发明中基于scheimpflug眼前节形态的屈光度精准评估方法的一种流程简图。
具体实施方式
33.下面结合实施例,对本发明进一步说明,下属实施例是叙述性的,不是限定性的,不能以下述实施例来限定本发明的保护范围。
34.本发明中所使用的结构,如无特殊说明,均为常规的结构;本发明中所使用的方法,如无特殊说明,均为本领域的常规方法。
35.一种基于scheimpflug眼前节形态的屈光度精准评估的方法,步骤如下:
36.步骤1:采集患者客观电脑验光数据以及眼前节数据特征,作为模型学习训练使用的特征,以主觉验光数据作为标签特征;
37.步骤2:对数据集进行划分,使用十折交叉验证的方法得到训练集和验证集;
38.步骤3:初始化模型f0(x),为只有一个根节点的树,使用均方根误差rmse,数据集中,x
i
为第i个样本,n为样本量,y
i
∈r;
39.步骤4:在上一模型f0(x)损失函数梯度下降方向上建立模型,所述模型构建采用的梯度提升算法xgboost,具体步骤如下:
40.⑴
对于每一个节点,计算所有特征以及选择不同划分点的gain值;
41.⑵
选择gain值最大的特征以及划分点将该节点的数据集分成两部分,直到满足停止条件,即gain值小于阈值或者达到最大树的高度;
42.⑶
用得到的新cart树更新模型f
m
=f
m
‑1+f
t
;
43.⑷
重复执行步骤
⑵
,直至迭代次数达到设定的迭代数t;
44.⑸
得到最终回归模型f
m
:
45.其中,xgboost采用网格化搜索调节的参数,设置如下:
46.迭代次数设置为500并使用早停止,树的最大深度为2,每棵树特征下采样率为0.8,每个节点特征下采样率为0.9,学习率0.05。
47.较优地,所述步骤1中模型学习使用的特征包括客观电脑验光、形态参数、眼前节数据,并对客观电脑验光、眼前节数据匹配标注。
48.较优地,所述形态参数包括角膜散光、角膜曲率、角膜非球面参数、角膜偏心值、角膜像差;
49.所述眼前节数据包括前房容积。
50.较优地,所述步骤2中利用交叉验证方法对数据集划分并对模型性能验证,即将数据集随机均匀分为10组,每次选1组作为验证集,其余几组作为训练集,并按该十折交叉验证的方法对模型进行训练。
51.如上所述的基于scheimpflug眼前节形态的屈光度精准评估的方法在屈光度检测方面中的应用。
52.如上所述的基于scheimpflug眼前节形态的屈光度精准评估的方法在视力筛查和/或近视防控方面和/或眼科临床诊疗中的应用。
53.具体地,相关制备及检测如下:
54.一种基于scheimpflug眼前节形态的屈光度精准评估的方法,图1所示为该方法的一种流程简图,包括以下步骤:
55.xgboost智能算法是梯度提升树(gradient boosting decision tree,gbdt)一种工程上的实现,并对gbdt的不足之处进行了改进。原始的gbdt算法基于经验损失函数的负梯度来构造新的决策树,只是在决策树构建完成后再进行剪枝。而xgboost在决策树构建阶段就加入了正则项,即
[0056][0057]
其中,f
t
‑1(x
i
)表示现有的t
‑
1棵树最优解,关于树结构的正则项定义为
[0058][0059]
其中,t为叶子节点个数,w
j
表示第j个叶子节点的预测值,对该损失函数在f
t
‑1处
进行二阶泰勒展开可以推导出
[0060][0061]
其中t为决策树f
t
中叶子节点的个数,
[0062][0063]
i
j
表示所有属于叶子节点j的样本的索引的集合。
[0064]
假设决策树的结构已知,通过令损失函数相对于w
j
的导数为0可以求出最小化损失函数的情况下各个叶子节点的预测值
[0065][0066]
然而从所有的树结构中寻找最优的树结构是一个np
‑
hard问题,因此在实际中往往采用贪心法来构建出一个次优的树结构,其基本思想是从根节点开始,每次对一个叶子节点进行分裂,针对每一种可能的分裂,根据特定的准则选取最优的分裂。不同的决策树采用不同的准则,如id3算法采用信息增益,c4.5算法为了克服信息增益中容易偏向取值较多的特征而采用信息增益比,cart算法采用基尼系数和平方误差,xgboost也有特定能够的准则来选取最优分裂。
[0067]
通常将预测值代入到损失函数可求得损失函数的最小值
[0068][0069]
容易计算出分裂前后损失函数的差值为
[0070]
xgboost通过最大化这个差值作为准则来进行决策树的构建,通过遍历所选的237个属性特征的所有取值,寻找使得损失函数前后相差最大时对应的分裂方式。此外,由于损失函数前后存在差值一定为正的限制,此时γ起到了一定的预剪枝作用。具体步骤如下:
[0071]
步骤1:初始化模型f0(x),为只有一个根节点的树,使用均方根误差rmse,数据集中,x
i
为第i个样本,n为样本量,y
i
∈r;
[0072]
步骤2:在上一模型损失函数梯度下降方向上建立模型。包括如下步骤:
[0073]
2.1:对于每一个节点,计算所有特征以及选择不同划分点的gain值
[0074]
2.2:选择gain值最大的特征以及划分点将该节点的数据集分成两部分,直到满足停止条件,即gain值小于阈值或者达到最大树的高度
[0075]
步骤3:用得到的新cart树更新模型
[0076]
f
m
=f
m
‑1+f
t
[0077]
步骤4:重复执行步骤2,直至迭代次数达到设定的迭代数t;
[0078]
步骤5:得到最终回归模型f
m
:
[0079][0080]
其中,xgboost采用网格化搜索调节的参数,设置如下:迭代次数设置为500并使用早停止,树的最大深度为2,每棵树特征下采样率为0.8,每个节点特征下采样率为0.9,学习率0.05。
[0081]
步骤6:使用xgboost预测模型对新病例的主觉验光值进行预测。
[0082]
最终模型自动学习到的特征重要性如下,可用于之后更复杂模型的输入:自动客观电脑验光等效球镜度(se);角膜散光、曲率、非球面参数、偏心值等形态参数;前房容积和角膜像差相关参数。
[0083]
下面将通过三个实施例说明通过本发明方法对于不同程度屈光度患者的精准评估结果的正确性:
[0084][0085][0086]
以上实施例分别从低度、中度、高度近视三类人群中说明。主觉验光为视光医师所得,可见电脑验光与主觉验光之间存在较大误差,对比显示ai预测结果与主觉验光之间的误差率明显提升。这将会减少患者就诊时间,极大提升临床工作效率。
[0087]
本发明的应用场景在于校园、社区筛查和医院使用,旨在提高我国视力筛查和近视防控的工作效率和准确率。
[0088]
尽管为说明目的公开了本发明的实施例,但是本领域的技术人员可以理解:在不脱离本发明及所附权利要求的精神和范围内,各种替换、变化和修改都是可能的,因此,本发明的范围不局限于实施例所公开的内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1