一种产科临床辅助顺产床的制作方法
1.本发明属于医疗器械技术领域,具体涉及一种产科临床辅助顺产床。
背景技术:
2.顺产的好处有很多,首先是对于新生儿,阴道分娩中宫缩刺激可以促进胎儿脑细胞发育,有利于新生儿神经平衡运动的发育。其次是产道对胎儿肺部挤压,可以帮助胎儿肺内羊水排出,刺激肺泡产生活性物质,对新生儿建立肺部正常呼吸有帮助,降低新生儿湿肺和呼吸窘迫综合征发生。因此,现在越来越多的产妇选择顺产胎儿。
3.目前产妇顺产多是在产床上进行。现有的产床一般包括床板和靠背两大部分,床板和靠背一般都是呈平板型,实质上不同的产妇体形不同,躺在床板或者靠背上时的接触面积和着力点都不一样。但是由于产床的床板可靠背的板面均无法实现调节,因此始终很难让产妇感觉到舒适。
4.顺产的时候由于胎儿挤压肠道,本身就有排便的感觉。而且在这一过程中,有可能会有排泄物排出,这是正常的。因此产床上一般都铺设有一次性医用垫,并在生产完毕后对产床进行人工彻底清洗。而现有的产床又不具有封闭的功能,很多时候排泄物不是固定的,和可能在产房内很多地方都有,因此清洁起来非常的费时费力。一般很多医院都只有一个产房,如果产妇过多,那么就会影响使用效率,而且顺产的产妇不想剖腹产,大多是不可能按时生的,而生的时候也不可能过长时间的等待,这就需要产房和产床大多数时候都必须处于可使用状态。
5.还有就是在顺产的时候,胎儿首先是头部出来。对于顺产不顺利的胎儿,还需要医生协助将胎儿由产妇阴道内拉出。医生的操作时利用手动吸盘吸取胎儿的头部,然后由下至上以弧形的轨迹将助力将胎儿手动拉出。但是由于排泄物的存在,因此操作起来还是给医生带来了不便。
技术实现要素:
6.本发明提供一种产科临床辅助顺产床,以解决背景技术中的问题。
7.本发明的技术方案如下:一种产科临床辅助顺产床,包括床体和助产机构,所述床体包括床板,所述床板通过转动机构连接有背靠板;所述助产机构包括支撑体,所述支撑体上固定安装有吊挂座,所述吊挂座上设有一条弧形滑道和一条弧形摩擦台阶,弧形滑道与弧形摩擦台阶同圆心,弧形滑道内设有移动组件;所述移动组件包括相互平行且均竖直设置的主吊挂杆和副吊挂杆,所述副吊挂杆的上端转动连接有滑轮,副吊挂杆通过滑轮与弧形轨道转动连接,所述副吊挂杆的下端与主吊挂杆固定;所述主吊挂杆的上端设有一根连接轴,所述连接轴沿轴向贯穿所述弧形滑道,连接轴的一端与主吊挂杆的上端转动连接,连接轴的另一端固定安装有摩擦轮,所述摩擦轮的轮面与弧形摩擦台阶的弧形台阶面抵接;所述主吊挂杆的上端还固定安装有驱动电机,该驱动电机的输出轴与所述连接轴同轴固定,通过驱动电机可驱动摩擦轮转动,进而实现摩擦轮沿着弧形台阶移动;所述主吊挂杆的
下端设有助拉组件,所述助拉组件包括助拉气缸、真空抽气泵和与胎儿的头部形状适应的固定吸盘,所述真空抽气泵与所述固定吸盘连通;所述助拉气缸与主吊挂杆转动连接,该助拉气缸的活塞杆与固定吸盘同轴固定,助拉气缸的活塞杆上套设有拉簧,拉簧的一端与助拉气缸固定、压簧的另一端与所述固定吸盘固定。
8.进一步:所述转动机构包括转轴和小电机,所述床板与背靠板通过转轴铰接,所述转轴与所述背靠板固定连接、转轴与所述床板转动连接,所述小电机与床板固定连接,小电机的输出轴与转轴同轴固定,通过小电机驱动转轴旋转进而调节背靠板的板面与水平方向上的夹角大小。
9.进一步:所述固定吸盘具有一个呈圆锥体的内腔,固定吸盘沿轴向包括封闭端和敞口端,且固定吸盘的内腔由封闭端至敞口端逐渐增大;所述固定吸盘的敞口端设有环形充气胶圈,所述环形充气胶圈的外环面沿固定吸盘的周向与固定吸盘的敞口端封闭固定连接;所述环形充气胶圈设有连通压缩空气的充气管。
10.进一步:所述固定吸盘的敞口端设有若干个环形充气胶圈,所有的环形充气胶圈的内环面直径由固定吸盘的封闭端至敞口端逐渐增大。
11.进一步:所述助拉气缸上沿其活塞杆的轴向设有一根毫米级标尺,所述毫米计标尺的一端与所述固定吸盘固定连接;所述助拉气缸上固定有一个由透明塑料制成的滑块,所述毫米级标尺贯穿所述滑块并与滑块滑动配合;所述滑块上固定有一个三角指针,所述三角指针指向所述毫米级标尺。
12.进一步:所述固定吸盘内设有第二空气压力传感器。
13.有益效果:本方案提供了一种产科临床辅助顺产床,该顺产床包括了用于助拉胎儿的助产机构。该助产机构专用于顺产的产妇在产房内使用,安装到产床旁边也可以独立于产床使用,可协助医生有产妇的体内拉出胎儿,而且全程自动化程度高,使得医生操作简单,避免产妇尴尬。
14.该助产机构完全模拟了现有的手动助产拉胎儿的器具以及模拟了医生手动拉胎儿的过程:首先是弧形滑道和弧形摩擦台阶分别与主吊挂杆和副吊挂杆的配合,实现了对主吊挂杆和副吊挂杆的竖向固定,然后利用摩擦轮实现了助拉气缸能够自动化移动,并且移动的轨迹与弧形滑道的轨迹匹配,以模拟医生在手动拉胎儿是的移动轨迹;并且助拉气缸与主吊挂杆可转动地连接,使得助拉气缸能够一边拉动胎儿一边自适应胎儿脱离母体的角度。
15.本方案中还对固定吸盘进行了优化,一方面固定吸盘能够与胎儿连接牢固以使得胎儿一次性脱离母体顺畅;另一方面还具有保护措施,通过设置的毫米级标尺等实现对胎儿拉拔力的控制,以避免产妇或胎儿受到伤害,最终实现对产妇和胎儿的保护。
附图说明
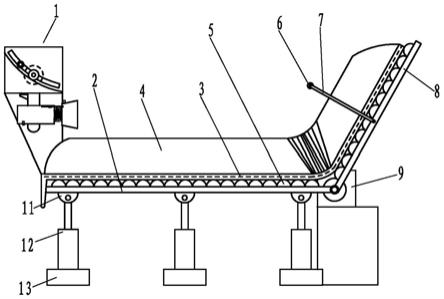
16.图1为本发明中床体与助产机构的整体安装结构示意图;
17.图2为本发明中气囊在床体上的平面布置图;
18.图3为本发明中助产机构的结构示意图;
19.图4为本发明中控制系统的控制原理图。
具体实施方式
20.下面结合附图和实施例对本发明作进一步说明:
21.如图1、图2、图3和图4所示,本发明公开了一种产科临床顺产辅助装置,包括床体和控制系统。床体包括床板2,床板2的底部设有若干个升降机构,利用升降机构以调节床板2与地面之间的竖向距离,以便于使用者躺到床板2上。
22.本方案中升降机构设有三个,三个升降机构沿着床板2的长度方向均布。升降机构包括底座13、双向气缸12以及一个支撑座11。支撑座11与床板2固定连接,双向气缸12的活塞杆与支撑座11铰接,双向气缸12固定连接在底座13上。
23.床板2通过转动机构连接有背靠板8。转动机构包括转轴和小电机9。床板2与背靠板8通过转轴铰接。转轴与所述背靠板8固定连接,转轴与所述床板2转动连接,小电机9与床板2固定连接,小电机9的输出轴与转轴同轴固定,通过小电机9驱动转轴旋转进而调节背靠板8的板面与水平方向上的夹角大小。也即背靠板8调节角度是通过小电机9来进行驱动的,非人工手动。
24.本案中,在床板2和背靠板8上设置有若干个气囊5。所有的气囊5沿床板2的背靠板8的板面的长方向均布。位于床板2上的气囊5的长度与床板2的宽度相等,位于背靠板8上的气囊5的长度与背靠板8的宽度相等。并且在本优化的实施例中,气囊5的横截面呈半圆形,气囊5的底平面与所述床板2或者背靠板8固定连接。
25.气囊5是否充气或者说充多少压缩空气并产生多大的形变,是通过本案中的控制系统来进行的。控制系统包括主控制模块、单元控制系统、空气压缩机,一个单元控制系统对应一个气囊5,由主控制模块对所有的单元控制系统进行控制。所述单元控制系统包括单元控制模块、第一空气压力传感器、进气管以及排气管,所述进气管上设有进气电控阀,利用进气电控阀以控制进气管的通断,所述进气管的一端连通空气压缩机、进气管的另一端连通对应的气囊5,由空气压缩机向气囊5内通入压缩空气;所述排气管上设有排气电控阀,利用排气电控阀以控制排气管的通断,所述排气管的一端连通对应的气囊5、排气管的另一端连通大气。
26.具体实施时,每一个单元控制模块用于控制一个气囊5。控制的原理如图4所示,分为三个过程。过程a:所有的气囊5首先是充入一定的压缩空气,此时控制气囊5内的压缩空气值为p1(一般为气囊5最大承压极限的1/3);过程b:产妇躺到床板2上,并且头部或者背部靠到背靠板8上,此时每一个单元控制模块通过各自的第一空气压力传感器检测到每一个气囊5内的压缩空气值,并将该压缩空气值记录到主控制模块内。通过对比过程a和过程b中每一个气囊5内的压缩空气值,可以得到使用者背部躺到床板2以及背靠板8上时,与床板2和背靠板8最为适应的躺卧曲线,并由主控制模块按照该曲线以正比的方式给每一个气囊5冲入对应的空气压力,使得沿床板2和背靠板8的长方向上的气囊5凹凸有致并形成一条与使用者躺卧时背部的形状类似的状态,使得使用者身体的每一个部位均能与气囊5接触并且所接触的气囊5的软硬程度大致相等。此时,使用者感觉最为舒适,产妇在用力生出胎儿时能够时身体各个部位发出的力度最为适合。
27.上述过程中,不同使用者的背部曲线是不同的,但是重复上述过程a和过程b,即可使得沿床板2和背靠板8长度方向上的气囊5所形成的凹凸曲线与使用者的背部曲线吻合,进而使得使用者无论是在躺卧或者坐卧时,背部均能得到气囊5有力的支撑,舒适度更佳。
而通过小电机9可以调节背靠板8的背靠角度,通过三个升降机构可以调节床板2的整体高度以及床板2的倾斜角度,这样产妇在顺产分娩时,不但产妇感觉更舒适,而且医生在接生的时候也可以通过调节各个角度以最为有利的姿态为产妇接生以便于操作。
28.出于清洗的要求,本发明还设计了这样的结构。在所述气囊5上也即气囊5远离床板2的面上设有可伸缩防水软垫3,所述可伸缩防水软垫3全覆盖所述床板2以及背靠板8,并且可伸缩防水软垫3以可拆卸的连接方式与气囊5连接,如采用魔术贴的可拆卸粘合结构。
29.如图1所示,所述可伸缩防水软垫3的沿床板2的宽度方向的两侧设有挡水折叠篷4,所述挡水折叠篷4沿床板2的长方向可折叠。无论背靠板8处于何种角度,可伸缩防水软垫3在气囊5的作用下变化出何种曲线,挡水折叠篷4均能够有效地防止清洁水飞溅出床体。同时也有效隔绝产妇排泄物的飞溅,以避免产房受到污染。尽可能的实现对产房环境的保护,以使得通过更换可伸缩防水软垫3以加快产房的周转使用效率。
30.并且在进一步优化中,可伸缩防水软垫3的内部嵌入有电加热丝。电加热丝可以实现可伸缩防水软垫3升温,以避免产妇受冷。作为一种优化,可伸缩防水软垫3可以采用乳胶垫或者硅胶垫。
31.我们知道,胎儿在脱离产妇的身体时,有时候还需要我们的医生进行协助。现有的协助方式则是通过医生手动来进行。通过一个类似于吸盘的手动助产器将胎儿的头部吸住,然后由下至上以一个弧形的轨迹助力胎儿由产妇的身体脱出。但是这种操作一是会增加医生的负担,让医生有时候很难顾及到产妇的其它症状,还有就是在有排泄物的情况下,医生操作起来有时候比较困难。因此,本发明还设计了一种助产机构1。
32.如图3所示,助产机构1包括支撑体15,所述支撑体15上固定安装有吊挂座14,所述吊挂座14上设有一条弧形滑道14a和一条弧形摩擦台阶14b,弧形滑道14a与弧形摩擦台阶14b同圆心,弧形滑道14a内设有移动组件;所述移动组件包括相互平行且均竖直设置的主吊挂杆16和副吊挂杆17,所述副吊挂杆17的上端转动连接有滑轮,副吊挂杆17通过滑轮与弧形轨道转动连接,所述副吊挂杆17的下端与主吊挂杆16固定;所述主吊挂杆16的上端设有一根连接轴,所述连接轴沿轴向贯穿所述弧形滑道14a,连接轴的一端与主吊挂杆16的上端转动连接,连接轴的另一端固定安装有摩擦轮19,所述摩擦轮19的轮面与弧形摩擦台阶14b的弧形台阶面抵接;所述主吊挂杆16的上端还固定安装有驱动电机18,该驱动电机18的输出轴与所述连接轴同轴固定,通过驱动电机18可驱动摩擦轮19转动,进而实现摩擦轮19沿着弧形台阶移动。
33.所述主吊挂杆16的下端设有助拉组件,所述助拉组件包括助拉气缸20、真空抽气泵和与胎儿的头部形状适应的固定吸盘22,所述真空抽气泵与所述固定吸盘22连通;所述助拉气缸20与主吊挂杆16转动连接,该助拉气缸20的活塞杆与固定吸盘22同轴固定,助拉气缸20的活塞杆上套设有拉簧21,拉簧21的一端与助拉气缸20固定、拉簧21的另一端与所述固定吸盘22固定。
34.助产机构1的助拉气缸20,在主吊挂杆16、副吊挂杆17、弧形滑道14a以及驱动电机18的协同作用下,实现助拉气缸20由下至上以弧形滑道14a的轨迹进行移动,从而模拟医生在手动助拉胎儿时的运动轨迹。而助拉气缸20通过固定吸盘22实现与胎儿头部的固定,进而为拉动胎儿提供着力点。固定吸盘22与胎儿头部的连接原理如下:固定吸盘22向床体的方向靠近,直至固定吸盘22与胎儿的头部接触,此时需要医生进行人工引导。然后真空抽气
泵抽取真空,固定吸盘22将胎儿头部吸住并保持。驱动电机18通过连接轴驱动摩擦轮19旋转,旋转的摩擦轮19牵引主吊挂杆16和副吊挂杆17沿着弧形滑道14a向远离床体的方向移动,在这一过程中由于助拉气缸20与主吊挂杆16是可以转动的,因此可以自动完成角度变化的适应,并最终实现模拟人工拉动胎儿。
35.上述过程使得自动化拉动胎儿得以实现。进一步优化中,固定吸盘22具有一个呈圆锥体的内腔,固定吸盘22沿轴向包括封闭端和敞口端,且固定吸盘22的内腔由封闭端至敞口端逐渐增大;所述固定吸盘22的敞口端设有环形充气胶圈25,所述环形充气胶圈25的外环面沿固定吸盘22的周向与固定吸盘22的敞口端封闭固定连接;所述环形充气胶圈25设有连通压缩空气的充气管。固定吸盘22的敞口端设有若干个环形充气胶圈25,所有的环形充气胶圈25的内环面直径由固定吸盘22的封闭端至敞口端逐渐增大。
36.优化后的固定吸盘22的工作原理如下:当固定吸盘22的敞口端首先接触到胎儿的头部以后,环形充气胶圈25与胎儿的头部接触。通过充气管向环形充气胶圈25内冲入压缩空气,环形充气胶圈25膨胀并紧密贴合到胎儿头部的皮肤上。真空抽气泵将固定吸盘22内部抽取至真空并维持。如果在拉动胎儿的过程中,环形充气胶圈25与胎儿的头皮之间有松动,那么充气管继续向环形充气胶圈25内冲入压缩空气,同时真空抽气泵继续抽取固定吸盘22内部的空气,直至固定吸盘22再次将胎儿的头部吸住。
37.上述过程中,有可能环形充气胶圈25脱离胎儿的头部是瞬时的,系统还来不及作出反应。因此设计了若干个环形充气胶圈25。当固定吸盘22与胎儿头部接触时,每一个充气胶圈与胎儿头部的接触位置均不同,不同内环面直径的环形充气胶圈25正好与胎儿的头部形状匹配适应。这样固定吸盘22与胎儿头部之间形成的真空区是由封闭端至敞口端逐渐增大的,形成多级式的连接固定。这样就可以有效解决固定吸盘22在固定胎儿是不稳定的问题。
38.但是,我们在设计时,也会考虑其它因素。比如:当胎儿的身体过大时,非常不易于脱离母体。如果强行拉动胎儿,那么可能会导致产妇受伤。因此,固定吸盘22内部的真空度是需要控制的。如何控制这个真空度,我们考虑按照如下方式来进行:
39.助拉气缸20上沿其活塞杆的轴向设有一根毫米级标尺23,所述毫米级标尺23的一端与所述固定吸盘22固定连接;所述助拉气缸20上固定有一个由透明塑料制成的滑块,所述毫米级标尺23贯穿所述滑块并与滑块滑动配合;所述滑块上固定有一个三角指针24,所述三角指针24指向所述毫米级标尺23。
40.助拉气缸20在拉动胎儿时,不是简单依靠助拉气缸20的空压动能,而是依靠的拉簧21的恢复力。主要是因为气缸的动作过快,而拉簧21在恢复形变时动作更慢,更加与人工手动拉动胎儿的动作匹配。通过读取三角指针24指示的毫米级标尺23的尺寸,这样我们可以很容易得到拉簧21的恢复力值,因为通过拉簧21的变形长度乘以拉簧21的形变系数可以计算得出来。因此我们设计了上述这样的结构,通过快速读取拉簧21的变形长度进而得到拉簧21的恢复力,实现控制拉动胎儿的力度,以避免因为力量过大而对胎儿或孕妇造成伤害,以使的拉动胎儿在一个可控的范围之内。当超过这一范围时,拉簧21就会反向作用或者不在收缩,而是进行拉伸,此时固定吸盘22不再向外拉动胎儿。
41.而且,我们还可以通过在固定吸盘22内设置第二空气压力传感器,以控制固定吸盘22与胎儿头部之间的真空度。通过调节真空度的大小,以调节环形充气胶圈25压紧在胎
儿头皮上的压紧力,以避免环形充气胶圈25对胎儿头部造成伤害。
42.如图1所示,背靠板8上还设置有可供产妇持握的扶手杆7,扶手杆7远离背靠板8的端部转动连接有握把6。产妇在使劲生出胎儿时,握把6可以供产妇持握。产妇生处胎儿的过程中,前述助产机构1将向远离床体的方向移动。我们在想:如果产妇在助产机构1的辅助作用下,能够自行控制胎儿的生出,那样对于产妇来说将是一个更大的好处,因为一旦产妇感觉到有什么不利的状况,产妇自身的感觉比医生的判断更加重要。
43.因此,我们在握把6内部设置了压力传感器,并将压力传感器通过控制系统电连接到驱动电机18上。当产妇的手用力握紧握把6时,握把6上的压力传感器将信号传递至驱动电机18,此时驱动电机18可以驱动摩擦轮19转动,助产机构1可以正常工作;而当产妇的手松开握把6,那么此时压力传感器则完全阻断驱动电机18,此时驱动电机18不能再继续工作。相当于压力传感器作为了一种产妇的保护措施。当产妇感觉到自身身体无法承受与胎儿脱离的痛苦时,可以通过松开握把6以立即停止助产机构1的辅助,与医生先判断后操作助产机构1停止相比,更为直接且有效,最大程度的对产妇进行了保护。
44.以上所述仅为本发明的较佳实施例而已,并不以本发明为限制,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1