粒子线扫描安全系统的制作方法
1.本实用新型涉及粒子线照射,特别涉及一种可感测粒子线的照射是否超出准直仪的照野范围的粒子线扫描安全系统。
背景技术:
2.随着医疗技术的发展,癌症治疗的方式日益多元。近年来,尤以粒子线照射治疗备受瞩目。在治疗过程中,粒子线照射治疗是利用粒子线照射于患者的体内的病灶部(例如,肿瘤,即癌细胞)以抑制或杀死癌细胞,从而达到治疗效果。
3.一般而言,在实际对患者进行粒子线照射治疗之前,会先对已拟定的治疗计画及放射剂量进行品质保证(quality assurance,qa)作业。然而,品质保证作业仅是术前的验证。现有技术无法在病患治疗的过程当中,即时、准确地判断粒子线的射束位置及照野大小。尤其是在发生紧急状况,例如突发地震时,粒子线可能偏离计画路径,但医疗人员却无从得知实际治疗过程与治疗计划之间是否一致以及其偏离程度。
技术实现要素:
4.有鉴于此,本实用新型的目的在于提供一种适用于粒子线照射装置的粒子线扫描安全系统。粒子线照射装置用以提供粒子线,并具有照射轴。粒子线扫描安全系统包含多个叶板、驱动模块以及感测模块。多个叶板彼此平行排列而定义出照射开口。驱动模块耦接于多个叶板。驱动模块用以根据驱动信号沿正交于照射轴的水平轴移动多个叶板以调整照射开口。感测模块位于多个叶板上,并且具有多个感测位置。当粒子线照射至至少一感测位置时,感测模块产生感测信号。
5.在本实用新型的一实施例中,前述的感测模块包含多个感测器。多个感测器设置多个叶板上,并且各感测器个别地对应于各感测位置。
6.在本实用新型的一实施例中,前述的各感测器是设置于相应的叶板的入射面上,且前述的照射轴垂直于各叶板的入射面。
7.在本实用新型的一实施例中,前述的各叶板沿水平轴延伸,并于水平轴上具有彼此相对的第一侧部与第二侧部,且前述的各叶板以其第一侧部与另一叶板的第一侧部彼此相对,以及前述各感测器是设置于相应的叶板的第一侧部上。
8.在本实用新型的一实施例中,前述的各叶板上设置有多个感测器中的一者。
9.在本实用新型的一实施例中,前述的各感测器是一种针尖游离腔(pinpoint chamber)。
10.在本实用新型的一实施例中,前述的各感测器是一种在本实用新型的一实施例中,前述的各感测器是一种线游离腔(wire chamber)。
11.在本实用新型的一实施例中,前述的驱动模块包含多个驱动器,各驱动器耦接于多个叶板中的一者,并用以沿水平轴移动相应的叶板。
12.综上所述,本实用新型实施例的粒子线扫描安全系统,其可通过位于叶板上的感
测模块对粒子线进行感测,并于至少一感测位置感测到粒子线时产生感测信号。在本实用新型粒子线扫描安全系统的一应用实施例中,通过分析粒子线扫描安全系统的感测模块所产生的感测信号,便可使得医疗人员得以于实际治疗过程中得知粒子线是否偏移出照野范围。此外,在本实用新型粒子线扫描安全系统的另一应用实施例中,根据是否收到任一感测信号,亦可使得医疗人员得以于实际治疗过程中得知粒子线是否偏移出照野范围。
13.以下结合附图和具体实施例对本实用新型进行详细描述,但不作为对本实用新型的限定。
附图说明
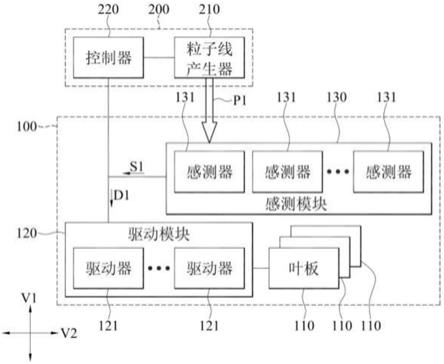
14.图1为本实用新型一实施例的粒子线扫描安全系统与粒子线照射装置的方框示意图;
15.图2为本实用新型一实施例的粒子线扫描安全系统的概要示意图;
16.图3为本实用新型一实施例的粒子线扫描安全系统的概要示意图;
17.图4为本实用新型一实施例的粒子线扫描安全系统的概要示意图;
18.图5为适用于本实用新型一实施例的粒子线扫描安全系统与粒子线照射装置的控制流程图;
19.图6为适用于本实用新型一实施例的粒子线扫描安全系统与粒子线照射装置的控制流程图。
20.其中,附图标记
21.100:粒子线扫描安全系统
22.110:叶板
23.110a:入射面
24.120:驱动模块
25.121:驱动器
26.130:感测模块
27.131:感测器
28.200:粒子线照射装置
29.210:粒子线产生器
30.220:控制器
31.d1:驱动信号
32.h1:照射开口
33.p1:粒子线
34.s1:感测信号
35.s11~s16:步骤
36.s21~s24:步骤
37.v1:照射轴
38.v2:水平轴
具体实施方式
39.为使本实用新型的实施例的上述目的、特征和优点能更明显易懂,下文配合所附的附图,作详细说明如下。
40.请参阅图1至图4,粒子线照射装置200可用以对治疗台上的患者的体内的病灶部(例如,肿瘤,即癌细胞)提供粒子线p1,以进行照射治疗。粒子线扫描安全系统100适用于粒子线照射装置200中,并且粒子线扫描安全系统100可用以按照患者的病灶部的形状来对粒子线p1进行塑形。在一些实施例中,粒子线扫描安全系统100可设置于粒子线照射装置200的喷嘴(nozzle)前端中。
41.在一些实施例中,粒子线照射装置200可包含粒子线产生器210与控制器220。控制器220耦接于粒子线产生器210。粒子线产生器210可用以产生粒子线p1,并且控制器220可用以对粒子线产生器210进行控制。举例而言,控制器220可控制粒子线产生器210是否输出粒子线p1、粒子线p1的强度分布、粒子线p1的粒子种类等等,但本实用新型并非以此为限。
42.在一些实施态样中,粒子线产生器210可利用回旋加速器、扫描电磁铁(wobbling magnets)、散射器(scatterer)、脊形过滤器(ridge filter)、挡块式准直仪、剂量监测器(profile monitor、dose monitor、flatness monitor)、旋转支架(gantry)等组合来实现。由于如何通过相应的元件、装置、仪器等的组合来产生所需的粒子线p1已为本领域技术人员所熟知,故以下不再赘述。
43.在一些实施态样中,控制器220可利用系统单晶片(soc)、中央处理器(cpu)、微控制器(mcu)、特殊应用集成电路(asic)、应用处理器(application processor,ap)、或数字信号处理器(digital signal processor,dsp)等来实现,但本实用新型并非以此为限。
44.粒子线照射装置200具有照射轴v1,并且粒子线照射装置200可沿照射轴v1提供粒子线p1。而粒子线扫描安全系统100可在与照射轴v1正交的水平轴v2上对粒子线p1的形状(即平面形状,于此是指粒子线p1在通过水平轴v2的水平面上的平面形状)进行调整,以使粒子线p1于通过粒子线扫描安全系统100后可大致上仅照射于患者的病灶部,从而降低或避免损伤到患者的其他正常组织。
45.在一些实施例中,粒子线p1可包含质子线、重粒子线(例如,碳离子)或中子线,但本实用新型并非以此为限,粒子线p1亦可为任何其他合适用于照射治疗领域的粒子线。
46.粒子线扫描安全系统100可包含多个个叶板110、驱动模块120以及感测模块130。多个叶板110彼此平行排列以定义出一照射开口h1。各叶板110于照射轴v1上具有彼此相对的入射面110a与出射面,并且粒子线照射装置200的照射轴v1会垂直于各叶板110的入射面110a以及出射面。于此,多个叶板110可称为一种多叶式准直仪(multi
‑
leaf collimator,mlc)。
47.在一些实施例中,各叶板110的长度方向可沿水平轴v2延伸。此外,此些叶板110大致上可分为左右两群(以下分别称的为左叶板群与右叶板群)。左叶板群中的叶板110彼此平行排列,右叶板群的叶板110彼此平行排列,且左叶板群中的每一叶板110可和右叶板群的某一叶板110彼此相对。
48.在一些实施态样中,叶板110可呈矩形板状,但本实用新型并非以此为限,叶板110亦可根据设计而呈其他特殊形状,以防范粒子线p1的部分粒子直接穿过叶板110的间的间隙(即,辐射渗漏)。举例而言,在一实施态样中,叶板110的末端可设计成圆弧形状态样。在
另一实施态样中,多个叶板110之间亦可设计成凹下与凸起交插相错的组合态样(tongue
‑
and
‑
groove),但本实用新型并非以此为限。
49.驱动模块120耦接于多个叶板110。驱动模块120可用以根据驱动信号d1沿着水平轴v2移动叶板110,以调整照射开口h1成所需的开口形状及大小。在一些实施例中,驱动信号d1可由控制器220提供。
50.在一些实施例中,驱动模块120可包含多个驱动器121。各驱动器121耦接于多个叶板110中的一者,并且可用以沿着水平轴v2移动所耦接的叶板110。换言之,驱动器121和叶板110之间是以一对一的方式连接。在一些实施态样中,驱动器121可以步进马达来实现,并通过连杆来带动相应的叶板110,但本实用新型并非以此为限。
51.感测模块130位于多个叶板110上。感测模块130具有多个感测位置,并且可用以感测是否有粒子线p1照射至此些感测位置上。当感测模块130于至少一个感测位置上感测到有粒子线p1照射到时,感测模块130可产生相应的感测信号s1。
52.在一些实施例中,感测模块130可耦接至控制器220,并可将产生的感测信号s1输出至控制器220,以交由控制器220根据感测信号s1进行后续控制。
53.在一些实施态样中,如图2所示,感测模块130可利用线游离腔(wire chamber)来铺设于多个叶板110上来实现。于此,感测模块130可大略将多个叶板110及照射开口h1覆盖于下。此时,感测模块130的感测位置除落于叶板110,更落于照射开口h1之中。
54.在一些实施例中,如图3或图4所示,感测模块130可包含多个感测器131。多个感测器131配置于叶板110上,且各感测器131个别地对应于各感测位置。换言之,各感测器131的所在位置即为所述的感测位置。于此,各感测器131是设置于相应的叶板110的入射面110a上。
55.在一些实施例中,各叶板110的于水平轴v2上具有彼此相对的第一侧部与第二侧部。其中,左叶板群中的各叶板110是以其第一侧部与右叶板群的某一叶板110的第一侧部相对。并且,各感测器131可设置于相应的叶板110的第一侧部上,以邻近于照射开口h1。
56.在一些实施例中,各叶板110的入射面110a上设有多个感测器131中的一者。换言之,感测器131可设置于每一个叶板110。但本实用新型并非以此为限。在另一些实施例中,感测器131亦可以间隔方式装设于叶板110的入射面110a上。
57.在一些实施态样中,感测器131可通过针尖游离腔(pinpoint chamber)来实现。此外,感测器131可通过于叶板110上挖槽或穿孔等方式装设于其上。
58.请参阅图5,以下,将先说明如何通过铺设于粒子线扫描安全系统100的叶板110上的感测模块130(例如,线游离腔)来感测出粒子线p1是否超出照野范围。
59.在根据治疗计划系统(treatment planning system,tps)所执行的分层照射程序中,首先,控制器220可输出驱动信号d1至驱动模块120,以致使驱动模块120根据驱动信号d1去移动叶板110,从而使得照射开口h1的形状可调整成为对应所需第一分层的开口形状(步骤s11)。于调整完后,控制器220可更进一步确认各叶板110是否在设定的位置上。倘若控制器220判定有叶板110未移动至设定的位置上,控制器220可重新输出驱动信号d1,以再次对照射开口h1进行调整。于判定各叶板110皆位在设定的位置上后,控制器220可更确认感测模块130的各感测位置的座标是否已定义(步骤s12)。于确认感测模块130的各感测位置的座标皆已定义后,控制器220可先将粒子线产生器210的参数设定为使粒子线p1的能量
成为对应所要照设的第一分层的能量。之后,控制器220可致使粒子线产生器210开始执行第一分层的粒子线照射(即,n为1)(步骤s13)。并且,控制器220可致使感测模块130进行感测,并将有电流出现的座标记录下来(步骤s14)。例如,控制器220可根据感测模块130于此次感测中所产生的至少一感测信号s1生成一记录档实用新型。于完成第一分层的粒子线照射后,控制器220可致使粒子线产生器210停止提供粒子线p1,并致使感测模块130停止感测。接续,控制器220可根据记录档实用新型分析其是否符合预定的治疗计划系统(步骤s15)。
60.当控制器220的判定结果为不符合时,表示粒子线p1的照射恐超出了照野范围,因此,控制器220将会结束整个程序。在一些实施例中,此时控制器220更可发送出警示讯息给粒子线照射装置200的医疗人员,以提示医疗人员去做进一步的检测与维修。反之,当控制器220的判定结果为符合时,控制器220可更进一步确认是否已执行到最后一层的粒子线照射(步骤s16)。当控制器220确认尚未执行到最后一层的粒子线照射时,控制器220可返回步骤s11以接续执行下一层的粒子线照射。依此类推,直至控制器220确认已执行到最后一层的粒子线照射(即,n为m)时,控制器便可结束整个分层照射程序。
61.请参阅图6,以下,将说明如何通过装设于粒子线扫描安全系统100的叶板110上的多个感测器131(例如,针尖游离腔)来感测出粒子线p1是否超出照野范围。
62.在根据治疗计划系统所执行的分层照射程序中,首先,控制器220可输出驱动信号d1至驱动模块120,以致使驱动模块120根据驱动信号d1去移动叶板110,从而使得照射开口h1的形状可调整成为对应所需第一分层的开口形状(步骤s21)。于调整完后,控制器220可更进一步确认各叶板110是否在设定的位置上。倘若控制器220判定有叶板110未移动至设定的位置上,控制器220可重新输出驱动信号d1,以再次对照射开口h1进行调整。于判定各叶板110皆位在设定的位置上后,控制器220可先将粒子线产生器210的参数设定为使粒子线p1的能量成为对应所要照设的第一分层的能量。之后,控制器220可致使粒子线产生器210开始执行第一分层的粒子线照射(即n为1)(步骤s22)。并且,控制器220可致使感测器131进行感测,且控制器220可判断是否有任一感测器131感测到粒子线p1(步骤s23)。其中,感测器131可在感测到有粒子线p1照射至其感测位置时产生感测信号s1。因此,在第一分层的粒子线照射的过程中,若控制器220接收到来自任一感测器131的感测信号s1时,表示粒子线p1的照射恐超出了照野范围,因此,控制器220将会致使粒子线产生器210停止提供粒子线p1、致使感测模块130停止感测并且结束整个程序。在一些实施例中,此时控制器220更可发送出警示讯息给粒子线照射装置200的医疗人员,以提示医疗人员去做进一步的检测与维修。反之,在完成第一分层的粒子线照射的过程中,控制器220并未接收到来自任一感测器131的感测信号s1时,控制器220可致使粒子线产生器210停止提供粒子线p1,并致使感测模块130停止感测。接续,控制器220可更进一步确认是否已执行到最后一层的粒子线照射(步骤s24)。当控制器220确认尚未执行到最后一层的粒子线照射时,控制器220可返回步骤s21以接续执行下一层的粒子线照射。依此类推,直至控制器220确认已执行到最后一层的粒子线照射时,控制器便可结束整个分层照射程序。
63.综上所述,本实用新型实施例的粒子线扫描安全系统,其可通过位于叶板上的感测模块对粒子线进行感测,并于至少一感测位置感测到粒子线时产生感测信号。在本实用新型粒子线扫描安全系统的一应用实施例中,通过分析粒子线扫描安全系统的感测模块所
产生的感测信号,便可使得医疗人员得以于实际治疗过程中得知粒子线是否偏移出照野范围。此外,在本实用新型粒子线扫描安全系统的另一应用实施例中,根据是否收到任一感测信号,亦可使得医疗人员得以于实际治疗过程中得知粒子线是否偏移出照野范围。
64.当然,本实用新型还可有其它多种实施例,在不背离本实用新型精神及其实质的情况下,熟悉本领域的技术人员当可根据本实用新型作出各种相应的改变和变形,但这些相应的改变和变形都应属于本实用新型所附的权利要求的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1