一种具备左右手互换功能的绳驱外骨骼康复机械臂的制作方法
[0001]
本实用新型涉及康复医疗设备领域,特别是涉及一种具备左右手互换功能的绳驱外骨骼康复机械臂。
背景技术:
[0002]
康复机器人作为一种医疗康复训练设备,能够帮助那些因疾病与意外事故而导致的肢体运动功能损伤的患者进行康复训练,替代传统康复训练中康复医师的工作,将康复医师从繁杂的重复劳动中解脱出来,能够显著地提高康复门诊的工作效率,或是进入普通病患的家中,实现在家就可以进行专业的康复训练治疗,此外康复机器人可以记录训练过程中的相关数据从而对患者的康复状态进行准确的评估,提高康复训练的效果。
[0003]
目前的已成熟商用的上肢康复机器人基本采用单侧训练模式,即每次训练只针对一侧的肢体,因为绝大部分患者是单侧运动功能受损,且这样能够保证患者在训练中拥有足够的运动空间,保障康复效果。为了应对不同侧运动功能受损的患者,有一些上肢康复机器人通过变换机器人关节旋转角度与工作空间来实现左右侧切换的功能,但上肢康复机器人拥有的关节很多,因此左右侧切换的操作对于康复医师来说较为复杂,且上述切换方法仅能够用于每个关节自由度对应有一个电机的机器人构型,其他种类的上肢康复机器人则只能够设置左手型与右手型的不同型号设备分别使用,成本高。
技术实现要素:
[0004]
为了克服现有技术的上述不足,本实用新型提出了一种具备左右手互换功能的绳驱外骨骼康复机械臂,解决现有康复机器人左右手模式切换操作复杂,而通过设置左右手型设备又存在成本高的技术问题。
[0005]
本实用新型是通过以下技术方案实现的:
[0006]
一种具备左右手互换功能的绳驱外骨骼康复机械臂,包括上悬臂及与所述上悬臂转动连接的肩顶旋臂,所述上悬臂的前端设有用于驱动肩顶旋臂旋转的第一驱动组件,所述肩顶旋臂的末端设有用于与左手型肩肘机械臂或右手型肩肘机械臂可拆卸连接的固定装置,所述肩顶旋臂通过固定装置与左手型肩肘机械臂、右手型肩肘机械臂中的其中一个连接。
[0007]
进一步的,所述右手型肩肘机械臂包括与肩顶旋臂末端可拆卸连接的水平连杆,所述水平连杆的另一端依次经上臂结构、前臂结构连接到腕部结构,所述上臂结构的上端设有用于驱动上臂结构和前臂结构旋转的第二驱动组件;
[0008]
所述左手型肩肘机械臂与右手型肩肘机械臂的结构呈左右镜像对称。
[0009]
进一步的,所述上臂结构、前臂结构在靠近患者的一侧分别设置有上臂接触腔、前臂接触腔;所述腕部结构上设有方便患者抓持的握柄。
[0010]
进一步的,所述固定装置包括空心轴及位于所述空心轴侧边的周向定位销,所述周向定位销与空心轴相对固定且相对于肩顶旋臂转动连接;
[0011]
所述水平连杆在与肩顶旋臂连接的一端设有轴向定位孔、周向定位孔,所述轴向定位孔与空心轴配合连接,安装旋钮穿过水平杆上的轴向定位孔与空心轴连接固定;所述周向定位孔与周向定位销配合连接。
[0012]
进一步的,所述上悬臂上固定安装有角度感应器。
[0013]
进一步的,所述角度感应器、第一驱动组件均连接到上位机。
[0014]
进一步的,所述上悬臂及水平连杆上分别设有上悬臂散热风扇、上臂散热风扇。
[0015]
进一步的,所述机械臂还设有外壳组件,在与所述第一驱动组件、第二驱动组件、上悬臂散热风扇及上臂散热风扇对应的外壳组件处设有排风口。
[0016]
与现有技术相比,本实用新型的有益效果在于:
[0017]
本申请提出的一种具备左右手互换功能的绳驱外骨骼康复机械臂,通过将机械臂分为固定部分和可替换部分,固定部分由上悬臂、第一驱动组件及肩顶旋臂等部件构成,可替换部分为左右两种手型的肩肘机械臂;通过简单的拆卸替换肩肘机械臂的型号,以及控制第一驱动组件的运动,即可实现机械臂左右手型号切换。不仅使得左右手替换的过程变得简单且能够有效的抑制成本。
附图说明
[0018]
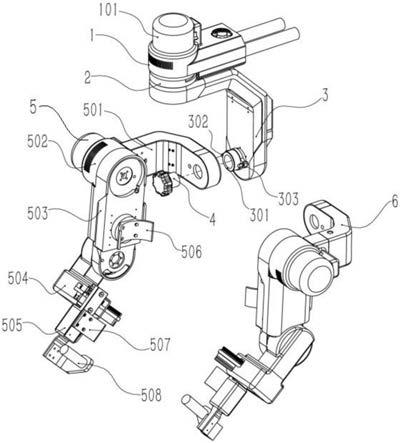
图1为本实用新型实施例所述的一种具备左右手互换功能的绳驱外骨骼康复机械臂的结构示意图;
[0019]
图2为本实用新型实施例所述肩顶旋臂运动区间示意图;
[0020]
图3为本实用新型实施例所述上悬臂散热风扇的结构示意图;
[0021]
图4为本实用新型实施例所述上臂散热风扇的结构示意图。
[0022]
图中:
[0023]
1、上悬臂;101、第一驱动组件;2、角度感应器;3、肩顶旋臂;301、空心轴;302、第一周向定位销;303、第二周向定位销;4、安装旋钮;5、右手型肩肘机械臂;501、水平连杆;502、第二驱动组件;503、上臂结构;504、前臂结构;505、腕部结构;506、上臂接触腔;507、前臂接触腔;508、握柄;6、左手型肩肘机械臂;7、上悬臂散热风扇;8、上臂散热风扇;a1、右手型设备工作区域;a2、左手型设备工作区域。
具体实施方式
[0024]
展示一下实例来具体说明本实用新型的某些实施例,且不应解释为限制本实用新型的范围。对本实用新型公开的内容可以同时从材料、方法和反应条件进行改进,所有这些改进,均应落入本实用新型的的精神和范围之内。
[0025]
如图1、3、4所示,一种具备左右手互换功能的绳驱外骨骼康复机械臂,包括上悬臂1及与所述上悬臂1转动连接的肩顶旋臂3,所述上悬臂1的前端设有用于驱动肩顶旋臂3旋转的第一驱动组件101,所述肩顶旋臂3的末端设有用于与左手型肩肘机械臂6或右手型肩肘机械臂5连接的固定装置,所述肩顶旋臂3通过固定装置与左手型肩肘机械臂6、右手型肩肘机械臂5中的其中一个连接。
[0026]
从右手型切换到左手型时,第一驱动组件101驱动肩顶旋臂3顺时针方向旋转,使其运动到初始位置,如图2所示(肩顶旋臂3俯视中心轴线置于右手型设备工作区域a1与左
手型设备工作区域a2交界处),拆下右手型肩肘机械臂5,安装左手型肩肘机械臂6,实现机械臂左右手型号切换。当从左手型切换到右手型时,同理。
[0027]
在本实施例中,所述右手型肩肘机械臂5包括与肩顶旋臂3末端可拆卸连接的水平连杆501,所述水平连杆501的另一端依次经上臂结构503、前臂结构504连接到腕部结构505,所述上臂结构503的上端设有用于驱动上臂结构503和前臂结构504旋转的第二驱动组件502;所述左手型肩肘机械臂6与右手型肩肘机械臂5的结构呈左右镜像对称。
[0028]
在本实施例中,所述上臂结构503、前臂结构504在靠近患者的一侧分别设置有上臂接触腔506、前臂接触腔507;所述腕部结构505上设有方便患者抓持的握柄508。在做康复训练时,患者的上臂通过上臂接触腔506与上臂结构503接触,患者的前臂通过前臂接触腔507与前臂结构接触,同时用绑带对患者的上臂、前臂加以固定;调整肩肘机械臂5的长度,使得患者的各关节轴心基本与肩肘机械臂5的轴心对齐,手部能够良好的抓持握柄508,保证康复训练的舒适性与有效性。
[0029]
在本实施例中,所述固定装置包括空心轴301及位于所述空心轴301左右两侧的第一周向定位销302、第二周向定位销303,所述第一周向定位销302、第二周向定位销303关于空心轴301轴线对称,所述第一周向定位销302、第二周向定位销303及空心轴301相对固定且相对于肩顶旋臂3转动连接,所述第一周向定位销302、第二周向定位销303及空心轴301三者轴线位于同一水平面;所述水平连杆501在与肩顶旋臂3连接的一端设有轴向定位孔、周向定位孔;当设备切换到右手模式时,所述右手型肩肘机械臂5水平连杆上的轴向定位孔与空心轴301配合连接,安装旋钮4穿过右手型肩肘机械臂5水平连杆上的轴向定位孔与空心轴301连接固定;所述右手型肩肘机械臂5水平连杆上的周向定位孔与第一周向定位销302配合连接,实现右手型肩轴机械臂5与肩顶旋臂3之间的安装;当设备切换到左手模式时,所述左手型肩肘机械臂6水平连杆上的轴向定位孔与空心轴301配合连接,安装旋钮4穿过左手型肩肘机械臂6水平连杆上的轴向定位孔与空心轴301连接固定,所述左手型肩肘机械臂6水平连杆上的周向定位孔与第二周向定位销303配合连接,实现左手型肩轴机械臂6与肩顶旋臂3之间的安装。
[0030]
在本实施例中,所述上悬臂1上固定安装有角度感应器2,由于肩顶旋臂3相对上悬臂1转动连接,肩顶旋臂3在第一驱动组件101驱动旋转的过程中,角度感应器2相对肩顶旋臂3也是转动的,通过角度感应器2准确测得上悬臂1与肩顶旋臂3的相对位置,方便控制康复机械臂运动。
[0031]
在本实施例中,所述上悬臂1及水平连杆501上分别设有上悬臂散热风扇7、上臂散热风扇8,上悬臂散热风扇7用于给第一驱动组件101散热降温,上臂散热风扇8用于给第二驱动组件502散热。
[0032]
在本实施例中,所述机械臂还设有外壳组件,在与所述第一驱动组件101、第二驱动组件502、上悬臂散热风扇7及上臂散热风扇8对应的外壳组件处设有排风口,对机械臂上的驱动组件进行更好的散热。
[0033]
在本实施例中,所述角度感应器2、第一驱动组件101均连接到上位机;上位机识别当前设备的左右手型号,获取角度感应器2传递的角度信号,控制第一驱动组件101在对应的工作区间工作,如图2中示出,a1为右手型设备工作区域;a2为左手型设备工作区域。当需要将设备从右手型转换为左手型时,在上位机中将设备设到初始位置,第一驱动组件101将
肩顶旋臂3顺时针旋转至初始位置,即将肩顶旋臂3俯视中心轴置于右手型设备工作区域a1与左手型工作区域a2交界处(见图2),之后拆除安装旋钮4并取下右手型肩肘机械臂5,安装左手型肩肘机械臂6时需要将水平连杆601上的轴向定位孔与空心轴301、周向定位孔与第二周向定位销303分别对齐后插入并用安装旋钮4紧固,最后在上位机中将运动模式设左手型运动模式,就能够实现机械臂的左右手型号切换。
[0034]
本申请的康复机械臂,通过对左右两种型号的肩肘机械臂进行简单的替换操作即可实现康复机器人左右手模式的切换,操作简单,康复设备成本低。
[0035]
以上所述仅为本实用新型的实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本实用新型的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1