一种智能医疗机器人的夹取装置的制作方法
1.本实用新型涉及夹取装置技术领域,尤其涉及一种智能医疗机器人的夹取装置。
背景技术:
2.智能医疗机器人是通过运用智能信息技术手段,能够实现对手术工具夹取工作,我国科技发展迅速,在一些先进的医院手术室内,经常可以看见智能医疗机器人辅助医师进行手术,科学性强。
3.目前,用于智能医疗机器人上的夹取装置,一般在夹取手术工具后需要通过人工消毒,反反复复,比较繁琐,使用效果差,另外,在对手术工具进行夹取,可能会造成手术工具损坏,造成不必要的经济损失,为此我们设计出了一种智能医疗机器人的夹取装置。
技术实现要素:
4.本实用新型提出的一种智能医疗机器人的夹取装置,解决了目前,用于智能医疗机器人上的夹取装置,一般在夹取手术工具后需要通过人工消毒,反反复复,比较繁琐,使用效果差,另外,在对手术工具进行夹取,可能会造成手术工具损坏,造成不必要的经济损失的问题。
5.为了实现上述目的,本实用新型采用了如下技术方案:
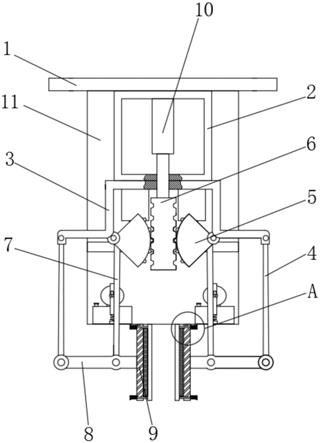
6.一种智能医疗机器人的夹取装置,包括安装座,所述安装座的底部固定有口字型支架,口字型支架的底部固定有不规则型支架,不规则型支架的两端均铰接有铰接杆一,两个铰接杆一之间设有铰接在不规则型支架上的两个相对称的弧形块,弧形块的外壁呈周向分布有多个凸齿,两个弧形块之间啮合连接有同一个活动板,活动板的两侧壁均等距开设有与多个凸齿相配合的齿槽,弧形块的底部均固定有铰接杆二,铰接杆二的底部均铰接有活动支架,活动支架的一端均与铰接杆一的一端相铰接,另一端均固定有夹板,口字型支架的内顶壁上固定有电动伸缩杆,电动伸缩杆的控制端贯穿口字型支架与不规则型支架,并与活动板相连,口字型支架的后方设有固定在安装座底部的支撑板,支撑板、口字型支架以及活动板之间连接有缓冲机构,支撑板的前侧壁上安装有两个消毒机构。
7.优选的,所述缓冲机构包括固定在活动板后端面上的移动板,移动板的另一端滑动连接在支撑板的前侧壁上,移动板的顶部固定有两个相对称的活塞杆,活塞杆的外侧均滑动套接有固定筒,固定筒固定在安装座的底部。
8.优选的,所述活塞杆的一端均固定有活塞,活塞滑动连接于固定筒的内部,夹板的外侧均固定有充气气囊,充气气囊的外侧均固定有缓冲板,夹板的内部均活动连接有两个相对称的缓冲杆,夹板的内部开设有与缓冲杆相配合的活动通道,缓冲杆的一端均固定有移动块,另一端均与缓冲板相连。
9.优选的,所述移动块的外侧均滑动连接有支撑块一,支撑块一固定在夹板的侧壁上,移动块与夹板之间均设有套设在缓冲杆外侧的弹簧一,充气气囊均通过连接管与固定筒相连。
10.优选的,所述消毒机构包括固定在支撑板前侧壁上的两个相对称的储液箱,储液箱的前侧壁上均滑动连接有挤压板,挤压板的另一端均滑动连接在支撑板前侧壁上,挤压板的底部均固定有弹簧二,弹簧二的底部均固定有支撑块二,支撑块二固定在储液箱的前侧壁上。
11.优选的,所述储液箱的顶部均固定有加压球,加压球与挤压板之间相贴合,加压球与储液箱之间均连接有进气口,加压球的外侧均安装有进气嘴,进气嘴与进气口上均设有单向进气阀,储液箱的内部安装有输出管,输出管另一端连接有喷头,喷头固定在挤压板的前侧壁上,喷头呈倾斜状设置。
12.与现有技术相比,本实用新型的有益效果是:
13.1、本实用新型消毒机构中,能够在两个夹板张开的同时,且通过进气口、进气嘴、输出管以及单向进气阀的配合,能够使得喷头将储液箱的内消毒液进行喷出,进而能对张开的缓冲板上进行消毒,便于对手术工具夹持前进行消毒,省却了人工消毒的步骤,省时省力,其结构设计合理,实用性强。
14.2、本实用新型缓冲机构中,在移动板、活塞杆、固定筒、充气气囊、缓冲板、缓冲杆、移动块、支撑块一、弹簧一的配合下,能够使两个夹板对手术工具进行夹紧的同时,并可以实现对手术工具夹紧时的缓冲,避免夹持力度太大,造成手术工具的损坏,避免造成一定的经济损失。
附图说明
15.图1为本实用新型提出的一种智能医疗机器人的夹取装置正视的结构示意图;
16.图2为本实用新型提出的一种智能医疗机器人的夹取装置的a处放大的结构示意图;
17.图3为本实用新型提出的一种智能医疗机器人的夹取装置的右侧视的剖面结构示意图;
18.图4为本实用新型提出的一种智能医疗机器人的夹取装置的b处放大的结构示意图。
19.图中:1、安装座;2、口字型支架;3、不规则型支架;4、铰接杆一;5、弧形块;6、活动板;7、铰接杆二;8、活动支架;9、夹板;10、电动伸缩杆;11、支撑板;12、缓冲机构;1201、移动板;1202、活塞杆;1203、固定筒;1204、充气气囊;1205、缓冲板;1206、缓冲杆;1207、移动块;1208、支撑块一;1209、弹簧一;13、消毒机构;1301、储液箱;1302、挤压板;1303、弹簧二;1304、支撑块二;1305、加压球;1306、进气口;1307、进气嘴;1308、输出管;1309、喷头。
具体实施方式
20.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
21.参照图1
‑
4,一种智能医疗机器人的夹取装置,包括安装座1、口字型支架2、不规则型支架3、铰接杆一4、弧形块5、活动板6、铰接杆二7、活动支架8、夹板9、电动伸缩杆10、支撑板11、缓冲机构12、移动板1201、活塞杆1202、固定筒1203、充气气囊1204、缓冲板1205、缓冲
杆1206、移动块1207、支撑块一1208、弹簧一1209、消毒机构13、储液箱1301、挤压板1302、弹簧二1303、支撑块二1304、加压球1305、进气口1306、进气嘴1307、输出管1308和喷头1309,安装座1的底部固定有口字型支架2,口字型支架2的底部固定有不规则型支架3,不规则型支架3的两端均铰接有铰接杆一4,两个铰接杆一4之间设有铰接在不规则型支架3上的两个相对称的弧形块5,弧形块5的外壁呈周向分布有多个凸齿,两个弧形块5之间啮合连接有同一个活动板6,活动板6的两侧壁均等距开设有与多个凸齿相配合的齿槽,弧形块5的底部均固定有铰接杆二7,铰接杆二7的底部均铰接有活动支架8,活动支架8的一端均与铰接杆一4的一端相铰接,另一端均固定有夹板9,口字型支架2的内顶壁上固定有电动伸缩杆10,电动伸缩杆10的控制端贯穿口字型支架2与不规则型支架3,并与活动板6相连,口字型支架2的后方设有固定在安装座1底部的支撑板11,支撑板11、口字型支架2以及活动板6之间连接有缓冲机构12,支撑板11的前侧壁上安装有两个消毒机构13,同时贯穿口字型支架2与不规则型支架3的内壁内分别开设有与电动伸缩杆10的控制端相配合的活动通孔,电动伸缩杆10的型号为ska
‑
01,安装座1的内部开设有四个安装孔,可通过紧固件以及安装孔的配合,与之外部智能医疗机器人的机械臂底端进行安装固定,拆装方便。
22.进一步的,缓冲机构12包括固定在活动板6后端面上的移动板1201,移动板1201的另一端滑动连接在支撑板11的前侧壁上,移动板1201的顶部固定有两个相对称的活塞杆1202,活塞杆1202的外侧均滑动套接有固定筒1203,固定筒1203固定在安装座1的底部,活塞杆1202的一端均固定有活塞,活塞滑动连接于固定筒1203的内部,夹板9的外侧均固定有充气气囊1204,充气气囊1204的外侧均固定有缓冲板1205,夹板9的内部均活动连接有两个相对称的缓冲杆1206,夹板9的内部开设有与缓冲杆1206相配合的活动通道,缓冲杆1206的一端均固定有移动块1207,另一端均与缓冲板1205相连,移动块1207的外侧均滑动连接有支撑块一1208,支撑块一1208固定在夹板9的侧壁上,移动块1207与夹板9之间均设有套设在缓冲杆1206外侧的弹簧一1209,充气气囊1204均通过连接管与固定筒1203相连,两个缓冲板1205相对向的一侧均设有硅胶垫,硅胶垫上设有防滑齿纹,能够避免手术工具滑落,增大与手术工具之间的摩擦力度。
23.进一步的,消毒机构13包括固定在支撑板11前侧壁上的两个相对称的储液箱1301,储液箱1301的前侧壁上均滑动连接有挤压板1302,挤压板1302的另一端均滑动连接在支撑板11前侧壁上,挤压板1302的底部均固定有弹簧二1303,弹簧二1303的底部均固定有支撑块二1304,支撑块二1304固定在储液箱1301的前侧壁上,储液箱1301的顶部均固定有加压球1305,加压球1305与挤压板1302之间相贴合,加压球1305与储液箱1301之间均连接有进气口1306,加压球1305的外侧均安装有进气嘴1307,进气嘴1307与进气口1306上均设有单向进气阀,储液箱1301的内部安装有输出管1308,输出管1308另一端连接有喷头1309,喷头1309固定在挤压板1302的前侧壁上,喷头1309呈倾斜状设置,储液箱1301的内壁内均设开设有与输出管1308相配合的穿孔,穿孔的内壁设有密封圈,密封圈套设在输出管1308的外侧,储液箱1301的顶部设有补充消毒液的注液口,注液口上螺纹连接有密封盖,通过松动密封盖,可对注液口处进行补充消毒液,便捷性高,喷头1309呈倾斜状设置,能够便于喷头1309对准两个夹板9张开的同时,进行喷洒雾状的消毒水,该处通过现有技术可以实现,不作具体介绍。
24.工作原理:通过安装座1设置的安装孔,并通过紧固件安装在医疗机器人机械臂
上,当需要对物体进行夹持时,则可以通过电动伸缩杆10启动,并推动其活动板6向下移动,进而使两侧啮合的弧形块5能够分别进行不同的方向活动,且在不规则型支架3、铰接杆一4、铰接杆二7、活动支架8的配合下,能够使得两个夹板9快速张开,同时移动板1201在支撑板11向下滑动,并对挤压板1302进行抵压,挤压板1302在储液箱1301以及支撑板11上向下滑动,并使弹簧二1303压缩,同时加压球1305被挤压,通过进气口1306、进气嘴1307、输出管1308以及单向进气阀的配合,能够使得喷头1309将储液箱1301的内消毒液进行喷出,进而能对张开的缓冲板1205上进行消毒,便于对手术工具夹持前进行消毒,省却了人工消毒的步骤,省时省力,当需要对物体进行夹持,通过电动伸缩杆10启动,并进行收缩,且使移动板1201向上移动,并使移动板1201对活塞杆1202向固定筒1203的内部进行挤压,进而使固定筒1203的内部空气通过连接管进入其充气气囊1204内,充气气囊1204膨胀,其缓冲板1205连接的缓冲杆1206拉动其移动块1207,且与支撑块一1208的配合,能够使得弹簧一1209压缩,进而能够使两个缓冲板1205对夹持的手术工具进行缓冲,避免造成手术工具夹伤,造成一定的经济损失。
25.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1