一种以RaspberryPi为核心的智能轮椅控制系统
一种以raspberry pi为核心的智能轮椅控制系统
技术领域
1.本实用新型涉及智能轮椅技术领域,尤其涉及一种以raspberrypi为核心的智能轮椅控制系统。
背景技术:
2.随着社会老龄化进程的加快以及由于各种疾病、工伤、交通事故等原因造成下肢损伤的人数的增加,为老年人及残障人士提供性能优越的代步工具已成为整个社会终点关注的问题之一。轮椅是康复的重要工具,它不仅是肢体伤残者和行动不便人士的代步工具,更重要的是使他们借助于轮椅进行身体锻炼和参与社会活动。
3.目前,市场上的轮椅大多为手推轮椅或电动轮椅,手推轮椅的结构相对简单,通常只能借助使用者自身力量或者借助他人的推力,而电动轮椅采用单手摇杆控制电动轮椅的行进方向,与手推轮椅相比有很大的进步,能够满足大部分老年人及残障人士的日常活动,但是对于低教育程度的老人、手部有残疾或疾病的残障人士来说,使用单手摇杆操控电动轮椅十分困难;对于患有老年痴呆症等自理能力较差的老年人,电动轮椅更是无法满足这部分人的需求,同时也给看护人员造成一定的负担。
技术实现要素:
4.本实用新型的目的,在于解决上述技术中的问题,提供一种操作简便、更具人性化的控制系统,满足不同人群的使用需求。
5.为了实现以上的目的,本实用新型通过以下技术方案予以实现:一种以raspberry pi为核心的智能轮椅控制系统,包括控制计算机、功能选择总控模块、摇杆控制模块、语音控制模块、移动端遥控模块、轮椅驱动模块、电源模块及语音口令数据库模块;所述功能选择总控模块与所述控制计算机进行数据连接,用于将使用者选择的功能指令发送给所述控制计算机;所述摇杆控制模块与所述控制计算机进行数据连接,用于将所述摇杆控制模块位置变化量发送给所述控制计算机;所述语音控制模块与所述控制计算机进行数据连接,用于采集使用者的语音并将语音指令编码发送给所述控制计算机;所述移动端遥控模块与所述控制计算机采用无线蓝牙串口通讯;所述轮椅驱动模块与所述控制计算机进行数据连接,用于根据所述控制计算机发送的控制信号驱动智能轮椅。
6.优选的,所述控制计算机为raspberry pi主板。
7.优选的,所述功能选择总控模块为一触摸屏,用于人机交互。
8.优选的,所述摇杆控制模块为一霍尔摇杆。
9.优选的,所述语音控制模块包括麦克风和语音编码器,所述麦克风用于采集使用者的语音,所述语音编码器与所述控制计算机进行数据连接,用于将语音指令编码发送给所述控制计算机。
10.优选的,所述语音口令数据库模块与所述控制计算机进行数据连接,所述语音口令数据库模块用于存储操作指令与其对应的语音口令信号之间的对应关系。
11.优选的,所述轮椅驱动模块包括电机控制器、轮椅步进电机和座背调节电机,所述电机控制器与所述控制计算机进行数据连接,用于根据控制信号驱动所述轮椅步进电机和所述座背调节电机,所述轮椅步进电机用于控制轮椅轮式移动,所述座背调节电机用于控制轮椅姿态转换。
12.优选的,所述移动端遥控模块包括移动端和蓝牙收发器,所述移动端通过app发送操作指令给所述蓝牙收发器,所述蓝牙收发器与所述控制计算机进行串口通讯,用于将接收到的操作指令发送给所述控制计算机。
13.优选的,所述电源模块采用5v/2a直流供电,所述电源模块与所述控制计算机采用usb连接方式。
14.与现有技术相比,本实用新型的有益效果为:
15.本实用新型包含多种轮椅轮式移动控制方式,适用场景广泛,本实用新型采用触摸屏进行人机交互,按键少,操控难度低;本实用新型有语音控制轮式行走模式,可以满足低教育程度的老人、手部有残疾或疾病的残障人士的日常出行需求;本实用新型有移动端遥控轮式行走模式,通过移动端遥控轮椅,能够方便看护人员照料自理能力较差的老年人;本实用新型以raspberry pi为核心,具备良好的控制性能,在控制轮椅时更加稳定。
附图说明
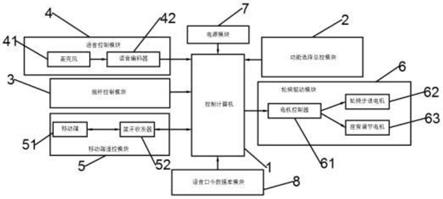
16.图1为本实用新型的系统构架框图;
17.图2为本实用新型的控制系统中摇杆控制轮式行走流程图;
18.图3为本实用新型的控制系统中语音控制轮式行走流程图;
19.图4为本实用新型的控制系统中移动端遥控轮式行走流程图。
20.图中:1
‑
控制计算机,2
‑
功能选择总控模块,3
‑
摇杆控制模块, 4
‑
语音控制模块,41
‑
麦克风,42
‑
语音编码器,5
‑
移动端遥控模块, 51
‑
移动端,52
‑
蓝牙收发器,6
‑
轮椅驱动模块,61
‑
电机控制器,62
‑ꢀ
轮椅步进电机,63
‑
座背调节电机,7
‑
电源模块,8
‑
语音口令数据库模块。
具体实施方式
21.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
22.参照图1,本实用新型提供一种技术方案:一种以raspberry pi 为核心的智能轮椅控制系统,包括控制计算机1、功能选择总控模块 2、摇杆控制模块3、语音控制模块4、移动端遥控模块5、轮椅驱动模块6电源模块7及语音口令数据库模块8;控制计算机1为 raspberry pi主板;功能选择总控模块2为一触摸屏,用于人机交互,能够切换轮椅姿态或选择轮椅轮式移动控制模式,功能选择总控模块 2与所述控制计算机1进行数据连接,用于将使用者选择的功能指令发送给控制计算机1;摇杆控制模块3为一霍尔摇杆,摇杆控制模块3 与控制计算机1进行数据连接,用于将摇杆控制模块3位置变化量发送给控制计算机1;语音控制模块4与控制计算机1进行数据连接,用于采集使用者的语音并将语音指令编码发送给控制计算机1;语音控制模块包括麦克风41和语音编码器42,麦克风41用于采集使用者
的语音,语音编码器42与控制计算机1进行数据连接,用于将语音指令编码发送给控制计算机1;语音口令数据库模块8与控制计算机 1进行数据连接,语音口令数据库模块8用于存储操作指令与其对应的语音口令信号之间的对应关系;移动端遥控模块5与控制计算机1 采用无线蓝牙串口通讯;移动端遥控模块5包括移动端51和蓝牙收发器52,移动端51通过app发送操作指令给所述蓝牙收发器52,蓝牙收发器52与控制计算机1进行串口数据连接,用于将接收到的操作指令发送给控制计算机1。轮椅驱动模块6与控制计算机1进行数据连接,用于根据控制计算机1发送的控制信号驱动智能轮椅;轮椅驱动模块包括电机控制器61、轮椅步进电机62和座背调节电机63,电机控制器61与控制计算机1进行数据连接,用于根据控制信号驱动轮椅步进电机62和座背调节电机63,轮椅步进电机62用于控制轮椅轮式移动,座背调节电机63用于控制轮椅姿态转换。
23.在轮椅的控制系统中,功能选择总控模块2作为总控部分,而功能选择总控模块2的控制则是通过系统中的小程序进行功能模式的切换,通过小程序可以使用功能选择总控模块2对轮椅进行轮式移动控制模式的切换、轮椅姿态转换等功能进行控制。当使用者对功能选择总控模块2的姿态转换模块进行操作时,功能选择总控模块2将发送数据到控制计算机1,控制计算机1接受数据后,控制座背调节电机63进行工作,并根据不同的命令产生不同的动作;当使用者按下轮式移动控制模式的切换功能时,将会出现摇杆控制轮式行走模式、语音控制轮式行走模式及移动端遥控轮式行走模式3种行走模式的选择,使用者可以根据需要选择不同的行走模式。
24.参照图2,摇杆控制轮式行走模式,使用霍尔摇杆作为使用者的操作杆。首先轮椅使用者在功能选择总控模块2中切换到摇杆控制轮式行走模式,切换模式后,摇杆控制轮式行走模式成为第一优先级,摇杆控制模块3作为轮椅控制系统的主控模块,摇杆控制模块3为一霍尔摇杆,当控制计算机1中检测到霍尔摇杆相对位置改变后,对霍尔摇杆的位置进行判断,之后将判断出的结果转换成rs485通信协议中的十六进制码,发送至rs485模块,rs485模块接收数据后,对相应的十六进制码进行处理,控制对应轮椅步进电机62转动,并可以通过控制计算机1检测到霍尔摇杆的位置距原点的距离,而向rs485 模块发送不同的数据,控制轮椅步进电机62转动的快慢,以达到控制轮椅行走的快慢。
25.参照图3,语音控制轮式行走模式中语音编码器42为respeaker4—mic,通过唤醒词唤醒语音控制模块4,使用者通过下达使用者的自定指令控制轮椅的各项功能;此功能使用前需要将使用者自定的指令导入到语音口令数据库模块8;通过语音口令数据库模块8中提前预置好与语音控制模块4相关的系统配置如唤醒词驱动文件等,之后用python代码实现对语音控制模块4的调用,当轮椅切换到语音控制轮式行走模式时,语音控制轮式行走模式成为第一优先级,摇杆控制模块4作为轮椅控制系统的主控模块,通过使用者说出唤醒词,语音控制模块4将使用者的输入命令发送到控制计算机1,控制计算机 1接受到信号后控制rs485模块发送数据到轮椅步进电机62最终驱动轮椅移动。
26.参照图4,移动端遥控模块中的蓝牙收发器52为hc
‑
05,移动端可以为手机、平板电脑等设备;移动端遥控轮式行走模式中,将蓝牙收发器52上对应的rx,tx,gnd,vcc接头分别接入控制计算机1上 gpio的tx,rx,gnd,vcc接口上并在控制计算机1中开启蓝牙收发器 52,而蓝牙收发器52本质是将蓝牙通信转换为串口通信,所以使用python编程将蓝牙收发器52和移动端51配对通过串口传送数据,同时移动端51上需要安装蓝牙串口通信助手app
和蓝牙收发器52配对,根据提前设定的遥控键的分布,设定前进后退左转右转的功能;移动端51中使用蓝牙串口助手app,在轮椅使用前将移动端51蓝牙串口助手app中的按键设为方向控制按键,并将前进后退左转右转按键分别对应前进后退左转右转相应的十六进制码;在使用移动端遥控轮式行走模式时,移动端51按键按下,手机中的蓝牙模块将会发送数据到蓝牙收发器52中,蓝牙收发器52接受到相应数据,传送至控制计算机1进行解码并转换为rs485通信协议的十六进制码,最后将数据发送到rs485模块中,进而控制轮椅步进电机62转动,最终控制轮椅的前进后退等移动端遥控功能。
27.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1