新型椎间融合器打入器
1.本实用新型属于医疗技术领域,具体涉及一种新型椎间融合器打入器。
背景技术:
2.椎间融合术是脊柱疾病的一种常用手术方法,主要用于脊柱畸形和其他脊柱疾患,如脊柱侧凸、后凸,脊柱骨折、脱位,脊柱滑脱及椎间盘疾病。椎间融合术使脊柱节段发生融合,形成一个力学整体,从而达到治疗脊柱疾患、消除疼痛、控制畸形发展、重建脊柱稳定性及保护脊髓神经的目的。根据手术方式不同分为斜入路(olif)腰椎椎间融合术、侧入路(xlif)腰椎椎间融合术、前入路(alif)腰椎椎间融合术等多种不同的手术方式。现有脊柱融合术过程为摆正并固定患者体位,透视下确定病变节段,选择手术切口,钝性分离腹膜后组织,手指保护下将导针放入目标椎间隙,扩张套筒逐步扩张,切除椎间盘,置入植入物,置入植入物时需要应用椎间融合器打入器,通过打击打入器的底座使植入物进入椎间隙,并不断在透视下调整植入物的位置。现有技术在插入植入物时需要在x线透视下反复确认其插入位置,不方便确认插入植入物的角度、深度,长期x线透视对医务人员身体有极大损害,因此发明一种方便判断插入植入物位置的打入器具有重要作用。
技术实现要素:
3.本实用新型为了解决现有技术中的不足之处,提供一种能够确定植入物角度和深度的新型椎间融合器打入器。
4.为解决上述技术问题,本实用新型采用如下技术方案:新型椎间融合器打入器,包括前杆体、限位螺母、定位部和打击底座,定位部的底面固定有手柄,定位部的顶部固定有支件,支件上具有卡槽,卡槽内通过卡接的方式连接有定位件,定位件具有四个定位反光球;前杆体的前端转动安装有融合器卡杆,融合器卡杆的前端具有卡槽;
5.前杆体的上部设置有深度刻度线,前杆体内设置有贯通的滑槽,滑槽沿前杆体的长度方向设置,前杆体的滑槽内设置有倾角测量件,倾角测量件包括滑块,滑块为h型结构,滑块滑动安装在前杆体的滑槽内,且滑槽上方和下方的前杆体嵌入h型滑块的槽内,滑块上螺纹连接有螺栓,螺栓内端与前杆体外壁顶压接触,滑块的后部固定有安装柱,安装柱上通过销轴铰接有量角器,量角器穿设在滑槽内。
6.在量角器的直边上设置有软垫。
7.采用上述技术方案,本实用新型具有以下有益效果:新技术既可以在普通肉眼观察下判断融合器插入的深度、角度,也可以在机器人辅助下的椎间融合术中判断,减少术中透视的次数,降低x线给操作人员带来的损害。
附图说明
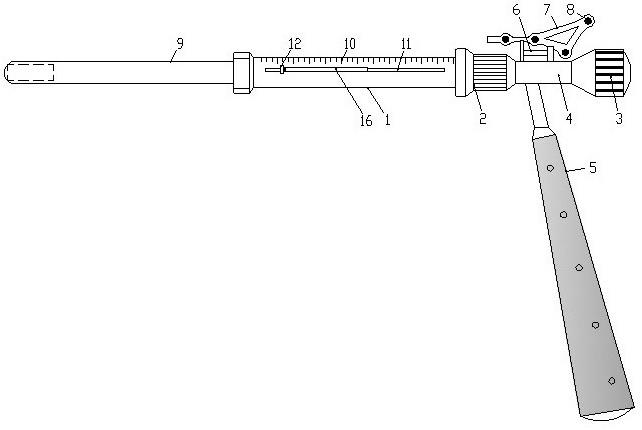
8.图1是本实用新型的结构示意图;
9.图2是倾角测量件的结构示意图。
具体实施方式
10.如图1所示,本实用新型的新型椎间融合器打入器,包括前杆体1、限位螺母2、定位部4和打击底座3,定位部4的底面固定有手柄5,定位部4的顶部固定有支件6,支件6上具有卡槽,卡槽内通过卡接的方式连接有定位件7,定位件7具有四个定位反光球8;前杆体1的前端转动安装有融合器卡杆9,融合器卡杆9的前端具有卡槽,该卡槽用于置放融合器;
11.前杆体1的上部设置有深度刻度线10,前杆体1内设置有贯通的滑槽11,滑槽11沿前杆体1的长度方向设置,前杆体1的滑槽11内设置有倾角测量件,倾角测量件包括滑块12,滑块12为h型结构,滑块12滑动安装在前杆体1的滑槽11内,且滑槽11上方和下方的前杆体1嵌入h型滑块12的槽内,滑块12上螺纹连接有螺栓13,螺栓13内端与前杆体1外壁顶压接触,螺栓13用于对滑块12进行定位,滑块12的后部固定有安装柱14,安装柱14上通过销轴15铰接有量角器16,量角器16穿设在滑槽11内。
12.在量角器16的直边上设置有软垫17。
13.新技术上设置有量角器16,通过滑块12在滑槽11内移动带动量角器16前后移动,并且通过深度刻度来判断融合器插入的深度;量角器16的前端设置有软垫17,避免量角器16直接与皮肤接触,前杆体1的前端转动安装有融合器卡杆9,融合器卡杆9可以转动,插入后可以转动手柄5,融合器卡杆9保持不动,前杆体1及量角器16发生转动,然后量角器16的直边和软垫17与皮肤直接接触,然后倾斜前杆体1,量角器16的软垫17保持与皮肤接触,量角器16与销轴15相对转动,即可判断前杆体1倾斜的角度;
14.新技术的尾端设置有可拆卸的定位件7,定位件7具有四个定位反光球8,排列方式如图1所示,通过定位反光球8可以在进行机器人手术辅助下的椎间融合术中显示融合器插入的深度、角度。
15.本实施例并非对本实用新型的形状、材料、结构等作任何形式上的限制,凡是依据本实用新型的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均属于本实用新型技术方案的保护范围。
技术特征:
1.新型椎间融合器打入器,其特征在于:包括前杆体、限位螺母、定位部和打击底座,定位部的底面固定有手柄,定位部的顶部固定有支件,支件上具有卡槽,卡槽内通过卡接的方式连接有定位件,定位件具有四个定位反光球;前杆体的前端转动安装有融合器卡杆,融合器卡杆的前端具有卡槽;前杆体的上部设置有深度刻度线,前杆体内设置有贯通的滑槽,滑槽沿前杆体的长度方向设置,前杆体的滑槽内设置有倾角测量件,倾角测量件包括滑块,滑块为h型结构,滑块滑动安装在前杆体的滑槽内,且滑槽上方和下方的前杆体嵌入h型滑块的槽内,滑块上螺纹连接有螺栓,螺栓内端与前杆体外壁顶压接触,滑块的后部固定有安装柱,安装柱上通过销轴铰接有量角器,量角器穿设在滑槽内。2.根据权利要求1所述的新型椎间融合器打入器,其特征在于:在量角器的直边上设置有软垫。
技术总结
新型椎间融合器打入器,包括前杆体、限位螺母、定位部和打击底座,定位部的底面固定有手柄,定位部的顶部固定有支件,支件上具有卡槽,卡槽内通过卡接的方式连接有定位件,定位件具有四个定位反光球;综上所述,新技术既可以在普通肉眼观察下判断融合器插入的深度、角度,也可以在机器人辅助下的椎间融合术中判断,减少术中透视的次数,降低X线给操作人员带来的损害。来的损害。来的损害。
技术研发人员:包贝西 曹震 许天泽 高振橙 李舒晴 唐家广
受保护的技术使用者:首都医科大学附属北京同仁医院
技术研发日:2020.12.23
技术公布日:2021/12/10
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1