连发式施夹钳的制作方法
1.本实用新型涉及一种连发式施夹钳,属于医疗器械技术领域。
背景技术:
2.目前,在人体腹腔手术中,尽量阻止出血是手术最终成功的一大要素,目前,主要使用施夹钳进行外科微创手术中血管或组织的结扎。
3.现有技术中大部分使用的还是单发式的施夹钳,这种施夹钳虽然结构简单,但是在需要多次使用结扎夹的手术中,需要多次填装结扎夹,使用非常不便。
技术实现要素:
4.本实用新型所要解决的技术问题是克服现有技术的缺陷,提供一种连发式施夹钳,它能够连续施发结扎夹,使用简单,操作方便。
5.为了解决上述技术问题,本实用新型的技术方案是:一种连发式施夹钳,它包括:
6.手柄部件,手柄部件包括柄壳、活动连接在柄壳上的前手柄和与前手柄相连的传动机构;
7.夹仓,夹仓内适于沿前后方向放置至少两个结扎夹;
8.钳头,钳头安装在夹仓的前端部,钳头包括相对保持张开趋势的两钳臂,两钳臂内适于容置结扎夹;
9.夹推板,夹推板与传动机构相连,夹推板适于由前手柄通过传动机构带动在夹仓内前后移动,以将夹仓内的结扎夹向前推送并将最前的结扎夹推送至两钳臂之间;
10.钳推杆,钳推杆与传动机构相连,钳推杆适于由前手柄通过传动机构带动向前移动作用于两钳臂使两钳臂互相靠近而使两钳臂之间的结扎夹闭合。
11.进一步,提供了一种夹仓的具体结构,夹仓具有放置结扎夹的仓腔,夹仓形成仓腔的底壁上设有凸出底壁、具有弹性并沿仓腔长度方向排列设置的至少两挡部,挡部适于抵住置于仓腔内的相应结扎夹的后部以防止结扎夹沿仓腔长度方向向后移动和在结扎夹沿仓腔长度方向向前移动接触挡部时向底壁方向形变以使结扎夹通过挡部。
12.进一步,挡部包括至少一弹性凸钩;其中,
13.弹性凸钩上设有沿仓腔长度向前方向呈逐渐远离底壁方向倾斜设置以适于与结扎夹接触后产生形变的倾斜面。
14.进一步,提供了一种夹推板的具体结构,夹推板包括板体,板体上设有凸出板体、具有弹性并沿板体长度方向排列设置的至少两推部;其中,
15.推部适于在板体沿长度方向向后移动接触置于仓腔内的相应结扎夹时向板体方向形变以使推部通过结扎夹和适于在板体沿长度方向向前移动接触结扎夹的后部时推动结扎夹一起向前移动。
16.进一步,推部包括至少一板体弹性凸钩;其中,板体弹性凸钩上设有沿板体长度向前方向呈逐渐远离板体方向倾斜设置以适于与结扎夹接触后产生形变的板体倾斜面。
17.进一步,前手柄铰接在柄壳上;
18.在前手柄绕着与柄壳铰接的铰接中心向后转动的过程中,夹推板向后移动直至与夹仓内至少部分的结扎夹的后端部抵接,钳推杆向前移动作用于两钳臂使两钳臂互相靠近而使两钳臂之间的结扎夹闭合;
19.在前手柄绕着与柄壳铰接的铰接中心向前转动的过程中,夹推板向前移动将夹仓内的结扎夹向前推送并将最前的结扎夹推送至两钳臂之间,钳推杆向后复位,使两钳臂互相远离而张开。
20.进一步,为了使得前手柄能够向前转动以自动回位,柄壳与前手柄之间设有用于使前手柄向前转动以回位的回位弹性件。
21.进一步,结扎夹在夹仓内沿前后方向间隔放置以使在相邻两次操作手柄的过程中,其中一次操作前手柄时将最前的结扎夹推送至两钳臂之间,另外一次操作前手柄时将推送至两钳臂之间的结扎夹闭合。
22.进一步,提供了一种传动机构的具体结构,传动机构包括:
23.适于相对柄壳滑动的钳推套,钳推套与前手柄活动连接,钳推套与钳推杆相连;
24.适于相对柄壳滑动的夹移套,夹移套与夹推板相连;
25.后联动件,后联动件的下端部铰接于柄壳上,后联动件的上端部与夹移套活动连接;
26.连接件,连接件的一端部与前手柄铰接,连接件的另一端部与后联动件铰接;其中,
27.在前手柄绕着与柄壳铰接的铰接中心向后转动的过程中,夹推板随夹移套向后移动,钳推杆随钳推套向前移动;
28.在前手柄绕着与柄壳铰接的铰接中心向前转动的过程中,夹推板随夹移套向前移动,钳推杆随钳推套向后移动。
29.进一步,前手柄与钳推套通过前连接机构活动连接;前连接机构包括:
30.设于前手柄上呈叉形的前连接叉;
31.设于钳推套上的前套筒,前套筒包括:
32.配合在前连接叉的两叉臂之间的前叉配合部,
33.适于在前手柄向后转动的过程中与前连接叉接触的前限位台阶,当前手柄向后转动的过程中,前手柄通过前连接叉与前限位台阶的接触配合推动钳推套向前移动。
34.进一步,后联动件上设有呈叉形的后连接叉;
35.夹移套包括:
36.配合在后连接叉的两叉臂之间的后叉配合部;
37.分别设于后叉配合部两端并与后连接叉的叉臂接触以限定后连接叉在夹移套上的前后位置的两后限位台阶。
38.进一步,为了使得钳推杆能够自动回位,还包括适于作用钳推杆使钳推杆向后移动以复位的弹性元件。
39.采用了上述技术方案后,当前手柄向后转动时,前连接叉可以在前叉配合部上有移动自由度,但是并不推钳推套向前移动,这段过程中,前手柄的向后转动可以通过连接件带动后联动件的后连接叉向后移,从而带动夹移套向后移动,由于夹推板连接在夹移套上
的,这样可以带动夹推板向后移动,夹推板向后移动直至与夹仓内至少部分的结扎夹的后端部抵接,夹移套移动一段距离后,前手柄通过前连接叉与前限位台阶的接触配合推动钳推套向前移动,钳推套带动钳推杆向前移动,作用于两钳臂使两钳臂互相靠近而使两钳臂之间的结扎夹闭合;在前手柄向前移动的过程中,也就是前手柄复位的过程中,可以通过连接件带动后联动件的后连接叉向前移,从而带动夹移套向前移动,由于夹推板连接在夹移套上的,这样可以带动夹推板向前移动,移动过程中带动结扎夹向前移动,并将最前的结扎夹推送至两钳臂之间,此时钳推杆可在弹性元件的作用下向后复位,使两钳臂互相远离而张开;另外,在本实用新型中,结扎夹在夹仓内间隔放置(相邻的放置位只放置一个结扎夹),这样可以在相邻两次操作手柄的过程中,其中一次操作前手柄时将最前的结扎夹推送至两钳臂之间,另外一次操作前手柄时,将推送至两钳臂之间的结扎夹闭合。
附图说明
40.图1为本实用新型的连发式施夹钳的立体图;
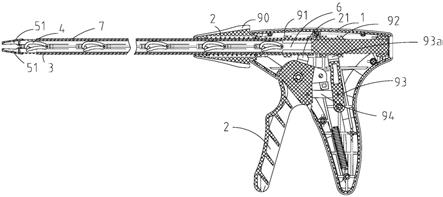
41.图2为本实用新型的连发式施夹钳的结构剖视图;
42.图3为本实用新型的结扎夹的立体图;
43.图4为本实用新型的夹仓的立体图;
44.图5为本实用新型的夹仓和结扎夹配合的立体图;
45.图6为本实用新型的夹推板的立体图;
46.图7为本实用新型的连发式施夹钳的尾部示意图。
具体实施方式
47.为了使本实用新型的内容更容易被清楚地理解,下面根据具体实施例并结合附图,对本实用新型作进一步详细的说明。
48.如图1~7所示,一种连发式施夹钳,它包括:
49.手柄部件,手柄部件包括柄壳1、活动连接在柄壳1上的前手柄2和与前手柄2相连的传动机构;
50.夹仓3,夹仓3内适于沿前后方向放置至少两个结扎夹4;
51.钳头5,钳头5安装在夹仓3的前端部,钳头5包括相对保持张开趋势的两钳臂51,两钳臂51内适于容置结扎夹4;
52.夹推板6,夹推板6与传动机构相连,夹推板6适于由前手柄2通过传动机构带动在夹仓3内前后移动,以将夹仓3内的结扎夹4向前推送并将最前的结扎夹4推送至两钳臂51之间;
53.钳推杆7,钳推杆7与传动机构相连,钳推杆7适于由前手柄2通过传动机构带动向前移动作用于两钳臂51使两钳臂51互相靠近而使两钳臂51之间的结扎夹4闭合。
54.具体地,在本实施例中,钳推杆7套于夹仓3外。
55.如图4、5所示,展示了一种夹仓3的具体结构,其结构如下:夹仓3具有放置结扎夹4的仓腔31,夹仓3形成仓腔31的底壁31a上设有凸出底壁31a、具有弹性并沿仓腔长度方向排列设置的至少两挡部31b,挡部31b适于抵住置于仓腔31内的相应结扎夹4的后部以防止结扎夹4沿仓腔长度方向向后移动和在结扎夹4沿仓腔长度方向向前移动接触挡部31b时向底
壁方向形变以使结扎夹4通过挡部31b。
56.在本实施例中,挡部31b可设多个。
57.具体地,如图4、5所示,挡部31b包括两弹性凸钩31c;其中,
58.弹性凸钩31c上设有沿仓腔长度向前方向呈逐渐远离底壁方向倾斜设置以适于与结扎夹4接触后产生形变的倾斜面31d。在结扎夹4向前移动的过程中,结扎夹4接触倾斜面31d,由于倾斜面31d的设置,弹性凸钩31c向下压,使得结扎夹4可以顺利通过,并抵于该弹性凸钩31c的前端。
59.具体地,如图3、4、5所示,结扎夹4设有限位块41;
60.底壁31a上设有适于嵌入限位块41的至少部分以对结扎夹4的移动进行导向的移动限位槽31f,两弹性凸钩31c分别位于移动限位槽31f的两侧。
61.当然,弹性凸钩31c的数量不局限于设置两个,也还可以是其他数量。
62.在本实施例中,如图2所示,挡部31b包括两弹性凸钩31c,两弹性凸钩31c分别位于移动限位槽31f的两侧。
63.如图6所示,夹推板6包括板体,板体上设有凸出板体、具有弹性并沿板体长度方向排列设置的至少两推部61;其中,
64.推部61适于在板体沿长度方向向后移动接触置于仓腔31内的相应结扎夹4时向板体方向形变以使推部61通过结扎夹4和适于在板体沿长度方向向前移动接触结扎夹4的后部时推动结扎夹4一起向前移动。
65.在本实施例中,推部61的数量可以设置多个。
66.如图6所示,推部61包括两板体弹性凸钩61a;其中,板体弹性凸钩61a上设有沿板体长度向前方向呈逐渐远离板体方向倾斜设置以适于与结扎夹4接触后产生形变的板体倾斜面61b。
67.如图3、6所示,结扎夹4上设有限位块41;
68.夹推板6上设有适于嵌入限位块41的至少部分以对夹推板6的移动方向进行导向的板体移动限位槽62。
69.在本实施例中,如图4所示,推部61包括两板体弹性凸钩61a,两板体弹性凸钩61a分别位于板体移动限位槽62的两侧。
70.当然,板体弹性凸钩61a的数量不局限于设置两个,也还可以是其他数量。
71.在夹推板6向后移动的过程中,推部61上的板体倾斜面61b与结扎夹4接触,由于板体倾斜面61b的设置,板体弹性凸钩61a向上移,使得夹推板6的推部61可以顺利通过,到达结扎夹4的后部的后方,在夹推板6向前移动时,推部61抵接结扎夹4的后部,向前推动结扎夹4,依次循环,从而实现连续施放结扎夹4。
72.如图2、7所示,前手柄2铰接在柄壳1上;
73.在前手柄2绕着与柄壳1铰接的铰接中心向后转动的过程中,夹推板6向后移动直至与夹仓3内至少部分的结扎夹4的后端部抵接,钳推杆7向前移动作用于两钳臂51使两钳臂51互相靠近而使两钳臂51之间的结扎夹4闭合;
74.在前手柄2绕着与柄壳1铰接的铰接中心向前转动的过程中,夹推板6向前移动将夹仓3内的结扎夹4向前推送并将最前的结扎夹4推送至两钳臂51之间,钳推杆7向后复位,使两钳臂51互相远离而张开。
75.如图7所示,柄壳1与前手柄2之间设有用于使前手柄2向前转动以回位的回位弹性件8。回位弹性件8可以是弹簧。
76.如图5所示,结扎夹4在夹仓3内沿前后方向间隔放置以使在相邻两次操作前手柄2的过程中,其中一次操作前手柄2时将最前的结扎夹4推送至两钳臂51之间,另外一次操作前手柄2时将推送至两钳臂51之间的结扎夹4闭合。
77.如图7所示,传动机构包括:
78.适于相对柄壳1滑动的钳推套91,钳推套91与前手柄2活动连接,钳推套91与钳推杆7相连;
79.适于相对柄壳1滑动的夹移套92,夹移套92与夹推板6相连;
80.后联动件93,后联动件93的下端部铰接于柄壳1上,后联动件93的上端部与夹移套92活动连接;
81.连接件94,连接件94的一端部与前手柄2铰接,连接件94的另一端部与后联动件93铰接;其中,
82.在前手柄2绕着与柄壳1铰接的铰接中心向后转动的过程中,夹推板6随夹移套92向后移动,钳推杆7随钳推套91向前移动;
83.在前手柄2绕着与柄壳1铰接的铰接中心向前转动的过程中,夹推板6随夹移套92向前移动,钳推杆7随钳推套91向后移动。
84.在本实施例中,夹仓3的后部插入柄壳1内,钳推套91滑动连接于夹仓3的后端部上,夹移套92也滑动连接于夹仓3的后端部上。
85.如图7所示,前手柄2与钳推套91可以通过前连接机构活动连接;前连接机构包括:
86.设于前手柄2上呈叉形的前连接叉21;
87.设于钳推套91上的前套筒,前套筒包括:
88.配合在前连接叉21的两叉臂之间的前叉配合部91a;
89.适于在前手柄2向后转动的过程中与前连接叉21接触的前限位台阶91b,当前手柄2向后转动的过程中,前手柄2通过前连接叉21与前限位台阶91b的接触配合推动钳推套91向前移动。
90.具体地,在前手柄2绕着与柄壳1铰接的铰接中心向后转动的过程中,前叉配合部91a的长度可以使得夹移套92先向后移动一段距离后,再通过前连接叉21与前限位台阶91b的接触配合推动钳推套91向前移动。
91.如图7所示,后联动件93上设有呈叉形的后连接叉93a;
92.夹移套92包括:
93.配合在后连接叉93a的两叉臂之间的后叉配合部92a;
94.分别设于后叉配合部92a两端并与后连接叉93a的叉臂接触以限定后连接叉93a在夹移套92上的前后位置的两后限位台阶92b。
95.如图2所示,连发式施夹钳还包括适于作用钳推杆7使钳推杆7向后移动以复位的弹性元件10。弹性元件10可以是弹簧。
96.如图1、2所示,它还包括旋转柄90,旋转柄90旋转连接于柄壳1上,操作人员可以人拿旋转柄90,旋转柄壳1,方便操作器械,具体地,弹性元件10设置于旋转柄90和钳推杆7之间。
97.如图7所示,它还包括适于在前手柄2转动过程中发出警示声音的声音提示装置。
98.声音提示装置包括但不限于以下结构,其包括:
99.设于前手柄2上的齿部22;
100.转动连接于柄壳1上的声音提示块70,声音提示块70上设有适于与齿部22配合以发出警示声音的嵌凸70a;
101.连接于声音提示块70a和柄壳1之间的弹性拉件70b。
102.在本实施例中,弹性拉件70b可以为弹簧。
103.当前手柄2向后转动时,前连接叉21可以在前叉配合部91a上有移动自由度,但是并不推钳推套91向前移动,这段过程中,前手柄2的向后转动可以通过连接件94带动后联动件93的后连接叉93a向后移,从而带动夹移套92向后移动,由于夹推板6连接在夹移套92上的,这样可以带动夹推板6向后移动,夹推板6向后移动直至与夹仓3内至少部分的结扎夹4的后端部抵接,夹移套92移动一段距离后,前手柄2通过前连接叉21与前限位台阶91b的接触配合推动钳推套91向前移动,钳推套91带动钳推杆7向前移动,作用于两钳臂51使两钳臂51互相靠近而使两钳臂51之间的结扎夹4闭合;在前手柄2向前移动的过程中,也就是前手柄2复位的过程中,可以通过连接件94带动后联动件93的后连接叉93a向前移,从而带动夹移套92向前移动,由于夹推板6连接在夹移套92上的,这样可以带动夹推板6向前移动,移动过程中带动结扎夹4向前移动,并将最前的结扎夹4推送至两钳臂51之间,此时钳推杆7可在弹性元件10的作用下向后复位,使两钳臂51互相远离而张开;另外,在本实用新型中,结扎夹4在夹仓3内间隔放置(相邻的放置位只放置一个结扎夹4),这样可以在相邻两次操作前手柄2的过程中,其中一次操作前手柄2时将最前的结扎夹4推送至两钳臂51之间,另外一次操作前手柄2时,将推送至两钳臂51之间的结扎夹4闭合。
104.在本实施例中,操作前手柄2包括向后转动及前手柄向前转动复位的过程。
105.以上的具体实施例,对本实用新型解决的技术问题、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上仅为本实用新型的具体实施例而已,并不用于限制本实用新型,凡在本实用新型的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
106.在本实用新型的描述中,需要理解的是,指示方位或位置关系的术语为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
107.在本实用新型中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
108.在本实用新型的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,或者是该实用新型产品使用时惯常摆放的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和
操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”、“第三”等仅用于区分描述,而不能理解为指示或暗示相对重要性。
109.此外,术语“水平”、“竖直”、“悬垂”等术语并不表示要求部件绝对水平或悬垂,而是可以稍微倾斜。如“水平”仅仅是指其方向相对“竖直”而言更加水平,并不是表示该结构一定要完全水平,而是可以稍微倾斜。
110.在本实用新型中,除非另有明确的规定和限定,第一特征在第二特征之上或之下可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征之上、上方和上面包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征之下、下方和下面包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平高度小于第二特征。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1