一种骨科导航/机器人手术用光学追踪固定装置的制作方法
1.本实用新型涉及医疗器械领域,特别是涉及一种骨科导航/机器人手术用光学追踪固定装置。
背景技术:
2.光学追踪系统是导航/机器人辅助骨科手术的关键技术。光学追踪标识可配合双目视觉系统一起使用,实现对患者位置的定位及实时追踪。在使用过程中,需要将光学追踪标识牢固固定于患者骨骼,并将其角度调节到理想位置,使之在双目视觉系统追踪范围内,并且保证双目视觉系统摄像头、患者骨骼的光学追踪标识以及手术探针上的光学追踪标识均处于一条直线,才能实现定位与导航功能。
3.由于手术室环境复杂,手术区域空间较小,人体用于固定的骨骼平面具有斜度且比较脆薄,如骨盆髂前上棘位置,在现有的导航/机器人系统辅助手术中,常常发生光学追踪装置固定不牢靠,术中松动,光学视线被遮挡等相关问题,极大影响了导航/机器人系统的定位精度,使手术最终失败。此外,在固定安装前需要行切口,部分装置由于安装繁琐,延长了手术时间,增加了患者伤口的感染率。一种易于安装与调节、并可实现牢固固定的光学追踪装置即可保证定位精度,又可提升手术效率,减少患者伤口感染率,是现行导航/机器人系统亟待解决的问题。
技术实现要素:
4.本实用新型的目的在于通过一种骨科导航/机器人手术用光学追踪固定装置将光学追踪标识与人体骨骼形成刚性连接的结构,双目追踪系统通过光学追踪标识来获取患者的位置坐标。
5.本实用新型通过以下技术方案来实现上述目的:一种骨科导航/机器人手术用光学追踪固定装置,包括光学安装架,用于安装光学标记物;支撑杆,支撑杆上端与所述光学安装架固定连接;以及固定组件,与人体骨骼固定连接,所述支撑杆下端通过支撑杆固定块固定在固定组件的一侧,并通过所述支撑杆固定块调节支撑杆相对固定组件的角度;所述固定组件包括第一夹块、第二夹块以及若干骨针,所述骨针夹在第一夹块和第二夹块之间,穿过第一夹块和第二夹块固定在人体骨骼上。
6.进一步地,所述固定组件包括3个骨针。
7.进一步地,所述第一夹块和第二夹块的配合面上设有3个骨针植入孔。
8.进一步地,相邻所述骨针传入孔的间距为15
‑
20mm。
9.进一步地,位于中间的骨针植入孔与位于两侧的骨针植入孔位置相错。
10.进一步地,所述骨针植入孔适用于直径为3.2
‑
4.5mm的骨针。
11.进一步地,所述骨针植入孔为平行四边形结构,钝角为113
°
,锐角为37
°
。
12.进一步地,所述支撑杆固定块通过第一螺栓和第二螺栓固定在所述第二夹块的外侧面,通过所述第一螺栓和第二螺栓调节所述支撑杆相对固定组件的角度。
13.进一步地,所述光学安装架呈不规则四边形状,四个角上均安装有与双目识别系统配合使用的光学追踪标识。
14.进一步地,所述支撑杆包括竖直部和弯曲部,竖直部通过支撑杆固定块固定在固定组件的一侧,弯曲部上端与所述光学安装架固定连接,弯曲部相对竖直部向一侧折弯30
°
。
15.与现有技术相比,本实用新型的有益效果如下:(1)支撑杆的弯曲部相对竖直部向一侧折弯30
°
,使得光学安装架朝一侧弯曲,以便于被双目识别系统识别;(2)骨针植入孔设计为平行四边形结构,可适应于不同直径大小的骨针;(3)通过第一螺栓和第二螺栓,可实现支撑杆的旋转和角度调整;(4)三个骨针植入孔不共线,以实现支撑杆和光学安装架的稳定固定。
附图说明
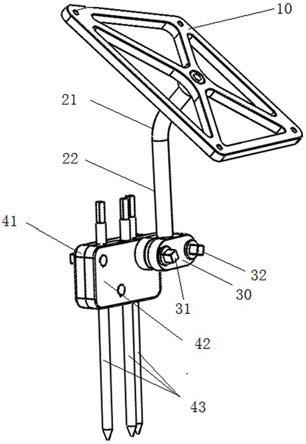
16.图1是本实用新型固定装置示意图;
17.图2是骨针植入孔示意图;
18.图3是骨针植入孔角度示意图;
19.附图标记说明如下:
20.10、光学安装架,21、弯曲部,22、竖直部,30、支撑杆固定块,31、第一螺栓,32、第二螺栓,41、第一夹块,42、第二夹块,43、骨针,45、骨针植入孔。
具体实施方式
21.下面结合附图对本实用新型作进一步说明:
22.一种骨科导航/机器人手术用光学追踪固定装置,如图1所示,包括光学安装架10、支撑杆以及固定组件。光学安装架10呈不规则四边形状,四个角上均安装有与双目识别系统配合使用的光学追踪标识,4个光学追踪标识形成光学追踪阵列,与双目识别系统配合确定骨钉安装位置处的角度和位置。
23.支撑杆包括竖直部22和弯曲部21,竖直部22通过支撑杆固定块30固定在固定组件的一侧,弯曲部21上端与光学安装架10固定连接,弯曲部21相对竖直部22向一侧折弯30
°
,使得光学安装架10朝一侧弯曲,以便于被双目识别系统识别。
24.固定组件包括第一夹块41、第二夹块42以及3个骨针43,3个骨针43夹在第一夹块41和第二夹块42之间,穿过第一夹块41和第二夹块42固定在人体骨骼上。如图2所示,第一夹块41和第二夹块42的配合面上设有3个骨针植入孔45,相邻骨针植入孔45的间距为15
‑
20mm。夹块结构具有套管定位的功能,可辅助植入第二或第三根骨针43。实际安装过程中,大致选择患者骨盆预植入位置(即通过该位置的选择,实现光学安装架10在y轴的定位),随意植入第一枚骨针,然后将第一夹块41与第二夹块42通过螺栓固定。医生可以第一枚骨针为中心轴,旋转两个夹块,直至获取第二枚骨针植入位置即为调整后的骨针植入孔对应的位置。
25.由于人体骨盆(髂嵴)位置较厚实,且毛细血管神经少,易于实现骨针的固定,并可最大程度减小创口,因此是理想位置。该位置面积小,骨针植入孔的间距设置为15mm
‑
20mm,位于中间的骨针植入孔与位于两侧的骨针植入孔位置相错,使得三个植入孔不共线,以实
现稳定的固定。
26.考虑到临床常用骨盆骨针直径为3.2mm
‑
4.5mm,依次骨针植入孔也设计成适用于直径3.2
‑
4.5mm骨针的结构。进一步地,骨针植入孔设计为平行四边形结构,设四边形的钝角为a,锐角为b, 在平行四边形内做内切圆,内切圆的半径为r,r为骨针的半径,r值已知,通过r值反求出可适配于这一半径范围的a 值及b值,分别为113
°
及37
°
,如图3所示。
27.支撑杆竖直部22竖直插入支撑杆固定块30内,支撑杆固定块30通过第一螺栓31和第二螺栓32固定在第二夹块42的外侧面,通过所述第一螺栓和第二螺栓调节所述支撑杆相对固定组件的角度。在实际使用中,光学安装架10上的四个光学追踪标识需要同时朝向双目摄像头,且两者之间无视线遮挡,以保证光学定位的精度。因此,本专利追踪阵列固定装置不仅具有固定功能,还具有角度/方向的调节功能,具体如下:当第一螺栓31固定,旋转第二螺栓32,可实现支撑杆的沿z 轴的360
°
旋转,用于调整光学追踪阵列上光学标记物的朝向;当第二螺栓32固定,旋转第一螺栓31,可实现支撑杆沿x轴方向的旋转,实现角度的调整。支撑杆固定块30设计为一端开口的结构,以使得位于支撑杆固定块30中间的支撑杆被夹紧。
28.以上显示和描述了本实用新型的基本原理、主要特征和优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是说明本实用新型的原理,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1