一种带制动的髋膝混合驱动助行器
1.本实用新型外骨骼助力助行领域,具体涉及一种带制动的髋膝混合驱动助行器。
背景技术:
2.下肢外骨骼机器人是老年人、残疾人及相关运动功能障碍辅助行走、助力助兴的重要解决办法。其中,膝关节是下肢外骨骼功能实现的重要一环。目前的外骨骼机器人主要有电机直驱、液压、气动等几大方式,但是都存在体积庞大,可穿戴性差,重量与电池续航之间矛盾的问题,比如现有技术:
3.1.公告号为cn107582334a的中国实用新型专利公开了一种外骨骼机器人及其膝关节部件,该膝关节部件包括膝关节驱动组件及膝关节传动组件,膝关节驱动组件包括膝关节摩擦轮,膝关节传动组件与膝关节摩擦轮摩擦连接,以在膝关节摩擦轮的摩擦驱动下转动。但在实际操作中存在一定的隐患,比如在室外工作时,电池没电的话则无法继续行走。
4.2.公告号为cn108186294a的中国实用新型专利公开了一种下肢康复外骨骼系统及其主从动性可调关节。包含相互连接的腰部穿戴单元、髋关节单元、大腿杆单元、膝关节单元、小腿杆单元、踝关节单元及足底单元。体积庞大,结构复杂,可穿戴性差,不利于室外活动。
5.综上,现有的结构过于依赖结构设计,适用的步态少,且上坡上楼不能做正功,髋膝间没有能量交互机制,难以进一步节能。因此,需要设计一种能够解决上述问题的结构。
技术实现要素:
6.本实用新型是为了解决上述问题而进行的,目的在于提供一种带制动的髋膝混合驱动助行器。
7.本实用新型提供了一种带制动的髋膝混合驱动助行器,用于辅助行走,具有这样的特征,包括:腰部固定件,放置于使用者腰部的后方,用于固定腰部;腰带,穿过腰部固定件缠绕于使用者的腰部,与腰部固定件配合固定使用者的腰部,且腰带侧面还套设有与腰部固定件连接的悬挂固定件;髋关节模块,通过悬挂固定件连接于腰带上,用于使用者髋关节的运动;膝关节模块,通过传动带与髋关节模块反向连接,用于使用者膝关节的运动,并与髋关节模块相配合,使得使用者行走;第一大腿杆件,与髋关节模块连接;第二大腿杆件,与膝关节模块连接,且与第一大腿杆件通过螺钉锁紧固定,还与第一大腿杆件配合,进而根据第一大腿杆件以及第二大腿杆件的长度调节传动带的长度;以及小腿护板,与膝关节模块通过销轴连接,贴附于使用者的小腿前方。
8.在本实用新型提供的带制动的髋膝混合驱动助行器中,还可以具有这样的特征:其中,悬挂固定件通过螺钉对长度进行调整,悬挂固定件的下方还连接有用于支撑腰部的腰部固定支撑件。
9.在本实用新型提供的带制动的髋膝混合驱动助行器中,还可以具有这样的特征:
其中,膝关节模块通过绑带固定于使用者的大腿与小腿上,且小腿处的绑带与小腿护板配合,从而将小腿绑牢,进而使得膝关节的力矩传递至小腿。
10.在本实用新型提供的带制动的髋膝混合驱动助行器中,还可以具有这样的特征:其中,髋关节模块包括:电机,通过电机固定板固定于悬挂固定件上,从而与悬挂固定件以及腰部固定支撑件连接,用于作为输出基座;第一转轴,一端通过法兰与电机的转子连接;第一带轮,套设于第一转轴上,其外部套设有传动带;离合器,具有与第一带轮同轴连接的活动端以及与第一转轴连接的固定端;第一轴承,套设于第一转轴上,并与离合器相邻设置;以及髋关节弹性输出盘,与第一大腿杆件通过螺钉固定连接,具有与第一转轴直连的第一内圈以及与第一大腿连杆连接的第一外圈,其中,当离合器活动端与离合器固定端啮合时,离合器固定端带动离合器活动端和第一带轮一同旋转并传递扭矩,离合器固定端与离合器活动端分离时,离合器活动端与第一带轮之间没有约束,也不传递扭矩和阻力。
11.在本实用新型提供的带制动的髋膝混合驱动助行器中,还可以具有这样的特征:其中,第一内圈与第一外圈之间通过弹性段连接,构成盘型的扭簧,用于储存能量或者作为实时监测扭矩的扭矩测量单元,第一外圈的底部沿第一转轴的方向开设有两个圆孔,用于螺钉的穿过,进而将髋关节弹性输出盘固定于第一大腿杆件上。
12.在本实用新型提供的带制动的髋膝混合驱动助行器中,还可以具有这样的特征:其中,膝关节模块包括:第二带轮,外部套设有传动带,并通过传动带与第一带轮反向连接;制动器,通过制动器固定板与第二大腿杆件固定连接,具有制动器固定端以及制动器活动端,且固定连接处为制动器固定端,制动器活动端与第二带轮连接;第二转轴,设置于第二带轮内部,且第二带轮通过第二转轴上的第二轴承固定于第二转轴上;以及膝关节弹性输出盘,具有与制动器活动端和第二带轮固定连接的第二内圈以及与小腿护板通过销轴连接的第二外圈,其中,当第二外圈以及制动器固定板与制动器活动端断开时,三者一同旋转,当制动器固定板与制动器活动端啮合时,制动器活动端和制动器固定端的相对位置保持不动。
13.在本实用新型提供的带制动的髋膝混合驱动助行器中,还可以具有这样的特征:其中,第二内圈与第二外圈之间通过弹性段连接,构成盘型的扭簧,用于储存能量或者作为实时监测扭矩的扭矩测量单元,第二外圈的底部沿水平方向开设有长孔,该长孔用于销轴的穿过,从而使膝关节弹性输出盘在人体冠状面内有1个活动自由度,进而进行旋转。
14.实用新型的作用与效果
15.根据本实用新型所涉及的带制动的髋膝混合驱动助行器,因为腰带与人体腰部绑紧,所以能够保证髋关节模块与膝关节模块不会因重力下滑;因为髋关节模块与膝关节模块由悬挂固定件连接到腰带上,所以能够根据不同需求来修改悬挂固定件的长度,;因为第一大腿杆件与髋关节模块连接,第二大腿杆件与膝关节模块连接,且膝关节模块与髋关节模块之间通过传动带反向连接,所以能够使膝关节模块与髋关节模块之间反向运动;因为第二大腿连杆与第一大腿杆件之间通过螺钉锁紧固定且长度可调,所以能够实现膝关节模块与髋关节模块之间的长度调节以及传动带的松紧调节;因为腰带侧面还套设有与腰部固定件连接的悬挂固定件,所以能够通过腰部作为固定基座,进而实现扭矩的输出。
16.因此,本实用新型的带制动的髋膝混合驱动助行器结构简单轻便、穿戴方便,建立了髋膝弹性体之间能量交互通路,优化了节能控制机制;还通过电机和离合器的配合,实现
了主动的髋膝联动,满足了上坡上楼等提升重心动作的能量注入需求。
附图说明
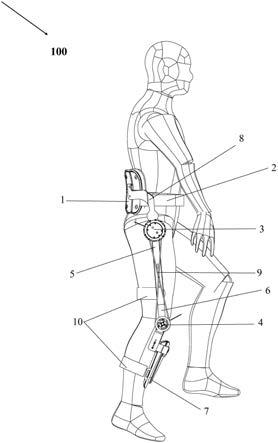
17.图1是本实用新型的实施例中带制动的髋膝混合驱动助行器的结构示意图;
18.图2是本实用新型的实施例中带制动的髋膝混合驱动助行器的佩戴示意图;
19.图3是本实用新型的实施例中带制动的髋膝混合驱动助行器的髋关节模块与膝关节模块的连接示意图;
20.图4是本实用新型的实施例中带制动的髋膝混合驱动助行器的髋关节模块的剖视图;
21.图5是本实用新型的实施例中带制动的髋膝混合驱动助行器髋关节模块的截面图;
22.图6是本实用新型的实施例中带制动的髋膝混合驱动助行器的髋关节弹性输出盘的示意图;
23.图7是本实用新型的实施例中带制动的髋膝混合驱动助行器的膝关节模块的立体示意图;
24.图8是本实用新型的实施例中带制动的髋膝混合驱动助行器的膝关节模块的剖视图;
25.图9是本实用新型的实施例中带制动的髋膝混合驱动助行器的膝关节模块的截面图;
26.图10是本实用新型的实施例中带制动的髋膝混合驱动助行器的膝关节弹性输出盘的示意图;
27.图11是本实用新型的实施例中带制动的髋膝混合驱动助行器的离合器和制动器工作相位示意图;
28.图12是本实用新型的实施例中带制动的髋膝混合驱动助行器的工作原理简图。
具体实施方式
29.为了使本实用新型实现的技术手段与功效易于明白了解,以下结合实施例及附图对本实用新型作具体阐述。
30.实施例:
31.如图1和如图2所示,本实施例的一种带制动的髋膝混合驱动助行器100,用于辅助行走,包括:腰部固定件1、腰带2、髋关节模块3、膝关节模块4、第一大腿杆件5、第二大腿杆件6以及小腿护板7。
32.腰部固定件1放置于使用者腰部的后方,用于固定腰部。
33.腰带2穿过腰部固定件1缠绕于使用者的腰部,与腰部固定件1配合固定使用者的腰部,且腰带2侧面还套设有与腰部固定件1连接的悬挂固定件8。
34.如图3
‑
图6所示,髋关节模块3通过悬挂固定件8连接于腰带2上,用于使用者髋关节的运动,包括:电机301、第一转轴302、第一带轮303、离合器304、第一轴承305以及髋关节弹性输出盘306。
35.电机301通过电机固定板307固定于悬挂固定件8上,从而与悬挂固定件8以及腰部
固定件1连接,用于作为输出基座,其中,电机固定板307与悬挂固定件8之间通过螺钉紧固。
36.本实施例中,悬挂固定件8并不是绑带,是金属件,通过螺钉对长度进行调整。
37.第一转轴302一端通过法兰与电机301的转子连接。
38.第一带轮303套设于第一转轴302上,其外部套设有传动带9
39.离合器304具有与第一带轮303同轴连接的离合器活动端3041以及与第一转轴302连接的离合器固定端3042,其中,由于第一转轴与第一内圈直连的同时第一外圈与第一大腿杆件5连接至此,从而使得扭矩可以传递到髋关节弹性输出盘306处,该髋关节弹性输出盘306利用弹性单元的弹性原理,可以将输出力计算得出。
40.第一轴承305套设于第一转轴302上,并与离合器304相邻设置。
41.髋关节弹性输出盘306与第一大腿杆件5通过螺钉固定连接,具有与第一转轴302直连的第一内圈以及与第一大腿连杆5连接的第一外圈,其中,第一内圈与第一外圈之间通过弹性段连接,构成盘型的扭簧,用于储存能量或者作为实时监测扭矩的扭矩测量单元,第一外圈的底部沿第一转轴302的方向开设有两个圆孔3061,用于螺钉的穿过,进而将髋关节弹性输出盘306固定于第一大腿杆件5上。
42.本实施例中,当离合器活动端3041与离合器固定端3042啮合时,离合器固定端3042带动离合器活动端3041和第一带轮303一同旋转并传递扭矩,离合器固定端3042与离合器活动端3041分离时,离合器活动端3042与第一带轮303之间没有约束,也不传递扭矩和阻力。
43.如图7
‑
图10所示,膝关节模块4通过传动带9与髋关节模块3反向连接,并通过绑带12固定于使用者的大腿与小腿上,用于使用者膝关节的运动,且小腿处的绑带12与小腿护板7配合,从而将小腿绑牢,进而使得膝关节的力矩传递至小腿,此外,还与髋关节模块3相配合,使得使用者行走,包括:第二带轮401、制动器402、第二轴承403以及膝关节弹性输出盘404。
44.第二带轮401的外部套设有传动带9,并通过传动带9与第一带轮303反向连接。
45.制动器402通过制动器固定板405与第二大腿杆件6固定连接,具有制动器固定端4021以及制动器活动端4022,且固定连接处为制动器固定端4021,制动器活动端4022通过沉头螺钉与第二带轮401固定连接。
46.第二转轴403设置于第二带轮401内部,且第二带轮401通过第二转轴403上的第二轴承固定于第二转轴403上。
47.膝关节弹性输出盘404具有与制动器活动端4022和第二带轮401固定连接的第二内圈以及与小腿护板通过销轴连接的第二外圈,其中,第二内圈与第二外圈之间通过弹性段连接,构成盘型的扭簧,用于储存能量或者作为实时监测扭矩的扭矩测量单元,第二外圈的底部沿水平方向开设有长孔4041,该长孔4041用于销轴的穿过,从而使膝关节弹性输出盘404在人体冠状面内有1个活动自由度,进而进行旋转。
48.本实施例中,当第二外圈以及制动器固定板405与制动器活动端4022断开时,三者一同旋转,当制动器固定板405与制动器活动端4022啮合时,制动器活动端4022和制动器固定端4021的相对位置保持不动。
49.第一大腿杆件5与髋关节模块3连接。
50.第二大腿杆件6与膝关节模块4连接,且与第一大腿杆件5通过螺钉锁紧固定,还与
第一大腿杆件5配合,进而根据第一大腿杆件5以及第二大腿杆件6的长度调节传动带9的长度,实现长短调节以及传动带9的松紧调节。
51.小腿护板7与膝关节模块4通过销轴连接,贴附于使用者的小腿前方,用于固定使用者的小腿,且小腿护板7的形状贴合人体的小腿形状。
52.本实施例的带制动的髋膝混合驱动助行器100穿戴于使用者的身上,通过绑带10固定,髋关节模块3的离合器304和膝关节模块4的制动器402的工作相位如下图11所示,工作原理如图12所示。
53.图11中的a为起始脚跟着地状态,以右腿为例,具体过程如下:
54.支撑腿着地时,其膝关节模块4的制动器402啮合,髋关节模块3的离合器304断开,所以如图12所示,膝关节弹性输出盘404起到扭簧的作用,优选方案扭簧的刚度。电机301壳体与腰部固定支撑件固定,电机按照预设扭矩曲线或转角曲线,由与髋关节弹性输出盘通过键连接的电机输出盘经过第一转轴向第一内圈传动,控制其输出力矩或第一内圈旋转角度,其可能的控制方式如下:
55.以平地步行为例,以支撑腿脚跟着地时刻为起始,此时膝关节模块4的制动器402锁紧,使膝关节弹性输出盘404的第二内圈或第二外圈与第二大腿杆件6固定,此时,外骨骼膝关节的弯曲会受到膝关节弹性输出盘404的弹性回复扭矩的抵抗,使膝关节趋于伸直状态。
56.当髋关节模块3随穿戴者肢体伸展(向后摆)且大腿轴线与垂线夹角大于0时,电机驱动髋关节弹性输出盘306的第一内圈旋转,使第一外圈随之旋转完成第一大腿杆件5和第二大腿杆件6的伸展动作,但保持第一内圈的转速/转角大于第一外圈的转速/转角,直到外骨骼大腿轴线与垂直夹角为零,在上述过程中,髋关节弹性输出盘306正向压缩储能,帮助大腿后摆和克服重心上升;当支撑腿髋关节伸展(向后摆)且大腿轴线经过垂线继续后摆时,电机301停转或以慢于大腿伸展速度的速度继续伸展,直到第一大腿杆件5和第二大腿杆6件随穿戴者大腿自然停止,在此过程中,髋关节弹性输出盘306反向压缩储能,捕捉重心下降过程中的重力势能和动能,在上述过程中,膝关节模块4的制动器402锁紧,使膝关节弹性输出盘404的第二内圈或第二外圈与第二大腿杆件6固定。
57.当穿戴者大腿自然后摆到极限位置并开始弯曲(向前摆)时,髋关节模块3的离合器304激活,使髋关节弹性输出盘306的第一内圈和第一带轮连接,并且电机301去使能或0扭矩控制,由于消除了电机301对第一转轴302和第一内圈的控制,且髋关节弹性输出盘306内储存着能量,髋关节弹性输出盘306的第一内圈会趋于释放能量的方向旋转(朝弯曲方向的反方向,即外圈开始前摆,内圈后摆方向旋转),并通过第一带轮传递到膝关节弹性输出盘404,此时再使膝关节模块4的制动器402松开,从而帮助膝关节实现一次短暂的伸展(因为传动带9呈8字型缠绕,第一带轮303和第二带轮401反向转动),直到髋关节弹性输盘305的内外圈角度一致,势能为零。之后,髋关节模块3随穿戴者肢体继续弯曲(前摆),此时髋关节模块3处的第一带轮303随大腿弯曲前摆,传动带9带动膝关节弹性输出盘404,辅助膝关节模块4随穿戴者一同弯曲,在此过程中,支撑腿自然离地,转化为摆动腿。当检测到穿戴者摆动腿再次伸展时,髋关节模块3的离合器304再次松开,使膝关节模块4和髋关节模块3运动解耦。当检测到摆动腿即将着地并且膝关节接近弯曲伸直时,膝关节模块4的制动器402再次启动。
58.实施例的作用与效果
59.根据本实施例所涉及的带制动的髋膝混合驱动助行器,因为腰带与人体腰部绑紧,所以能够保证髋关节模块与膝关节模块不会因重力下滑;因为髋关节模块与膝关节模块由悬挂固定件连接到腰带上,所以能够根据不同需求来修改悬挂固定件的长度;因为第一大腿杆件与髋关节模块连接,第二大腿杆件与膝关节模块连接,且膝关节模块与髋关节模块之间通过传动带反向连接,所以能够使膝关节模块与髋关节模块之间反向运动;因为第二大腿连杆与第一大腿杆件之间通过螺钉锁紧固定且长度可调,所以能够实现膝关节模块与髋关节模块之间的长度调节以及传动带的松紧调节;因为腰带侧面还套设有与腰部固定件连接的悬挂固定件,所以能够通过腰部作为固定基座,进而实现扭矩的输出。
60.根据本实施例所涉及的带制动的髋膝混合驱动助行器,因为采用了绑带,所以能够将膝关节模块固定于使用者的大腿与小腿上。
61.根据本实施例所涉及的带制动的髋膝混合驱动助行器,因为髋关节模块具有相互配合的电机、第一转轴、第一带轮、离合器、第一轴承以及髋关节弹性输出盘,所以能够在离合器活动端与离合器固定端啮合时,通过离合器固定端带动离合器活动端和第一带轮一同旋转并传递扭矩,离合器固定端与离合器活动端分离时,离合器活动端与第一带轮之间没有约束,也不传递扭矩和阻力。
62.根据本实施例所涉及的带制动的髋膝混合驱动助行器,因为膝关节模块具有相互配合的第二带轮、制动器、第二转轴以及膝关节弹性输出盘,所以能够在膝关节弹性输出盘的第二外圈以及制动器固定板与制动器活动端断开时,三者一同旋转,当制动器固定板与制动器活动端啮合时,制动器活动端和制动器固定端的相对位置保持不动。
63.因此,本实施例的带制动的髋膝混合驱动助行器结构简单轻便、穿戴方便,建立了髋膝弹性体之间能量交互通路,优化了节能控制机制;还通过电机和离合器的配合,实现了主动的髋膝联动,满足了上坡上楼等提升重心动作的能量注入需求。
64.上述实施方式为本实用新型的优选案例,并不用来限制本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1