在医疗程序中利用眼睛的一个或多个图像的系统和方法与流程
在医疗程序中利用眼睛的一个或多个图像的系统和方法
1.发明背景
技术领域
2.本公开涉及眼科手术和手术器械,更具体地,涉及与在医疗程序中利用眼睛的一个或多个图像相关联的系统和方法。
背景技术:
3.眼科手术每年拯救和改善数以万计患者的视力。然而,考虑到视力对眼睛的甚至小变化的敏感度以及许多眼睛结构的微小而脆弱的性质,很难进行眼科手术,并且甚至小的或不寻常的手术错误的减少或手术技术的准确度的小幅改进都可以对患者术后的视力产生巨大的不同。
4.眼科手术是对眼睛或眼睛的任何部分进行的手术。进行眼科手术通常为了修复视网膜缺陷、修复眼睛肌肉、去除白内障或癌症、或恢复或改善视力。例如,屈光眼睛手术是为了改善眼睛的屈光状态以便减少或消除对眼镜或隐形眼镜的依赖而使用的一种眼科手术。屈光手术程序可以包括以手术方式重塑角膜和/或白内障手术,其中的任何一个都可以通过一个或多个激光器进行。
5.在各种眼科手术程序中,激光器可以使用光致破裂来产生切口。当用激光器执行眼科手术时,手术程序典型地包括对接、成像、分析和激光治疗。在对接期间,患者的眼睛与抽吸锥体对接以便提供压力使患者的角膜变平(被称为扁平)并且将角膜固持在位以便进行激光治疗。对接是敏感的过程,在z方向以及x方向和y方向上正确放置抽吸环对于成功的眼科手术而言是重要的。
技术实现要素:
6.本公开提供了一种能够经由至少一个图像传感器获取人的眼睛的至少图像的系统。在一个示例中,该至少一个图像传感器可以包括至少一个相机。在第二示例中,该至少一个图像传感器可以包括多个图像传感器。在另一个示例中,眼睛的至少一个图像可以包括眼睛的多个图像。所述系统可以进一步根据所述眼睛的所述至少图像来确定所述眼睛的虹膜的位置,并且可以进一步根据所述眼睛的所述至少图像来确定抽吸环的位置。例如,在抽吸环与眼睛对接之前,所述系统可以根据所述眼睛的所述至少图像来确定所述抽吸环的位置。抽吸环可以与眼睛对接以进行医疗程序。所述系统可以进一步经由显示器显示所述眼睛的所述至少图像。例如,显微镜集成显示器可以包括该显示器。系统可以包括显微镜集成显示器。所述系统可以进一步可以进一步经由所述显示器显示在所述眼睛的所述至少图像上的指示所述眼睛的虹膜的位置的第一图形叠层(overlay),并且可以进一步经由所述显示器显示在所述眼睛的所述至少图像上的指示所述抽吸环的位置的第二图形叠层。例如,第二图形叠层可以在将抽吸环与眼睛对接时向医师或外科医生提供引导。所述系统可以进一步根据所述眼睛的所述至少图像来确定多个虹膜结构。在一个示例中,该多个虹膜
结构可以为与眼睛相关联的一个或多个取向提供一个或多个基础。在另一个示例中,该多个虹膜结构可以为与眼睛相关联的一个或多个测量值提供一个或多个基础。所述系统可以进一步至少基于来自所述眼睛的所述至少图像的所述多个虹膜结构来确定所述眼睛的取向,并且可以进一步经由所述显示器显示指示所述眼睛的取向的信息。例如,指示所述眼睛的取向的所述信息可以包括表示与所述眼睛的取向相关联的标线的图形叠层。
7.所述系统可以进一步经由所述显示器显示图形叠层,所述图形叠层表示与所述抽吸环的取向相关联的标线。例如,与抽吸环的取向相关联的标线可以在将抽吸环与眼睛对接时为医师或外科医生提供引导。所述系统可以进一步至少基于来自所述眼睛的所述至少图像的所述多个虹膜结构来确定至少一个切口部位,并且可以进一步经由所述显示器显示指示所述至少一个切口部位的图形叠层。确定所述至少一个切口部位可以包括确定多个切口部位。系统可以进一步经由显示器显示指示相应多个切口部位的多个图形叠层。例如,系统可以经由显示器同时显示指示相应多个切口部位的多个图形叠层。所述系统可以进一步确定相对于所述眼睛的瞳孔的中心距所述多个虹膜结构中的某个虹膜结构的角度测量值。例如,所述系统可以经由所述显示器显示图形叠层,所述图形叠层至少基于所述角度测量值来指示所述至少一个切口部位。
8.本公开进一步包括一种具有指令的非暂态计算机可读存储器装置,所述指令当由系统的处理器执行时使得所述系统执行上述步骤。本公开进一步包括如以上所描述的具有一个或多个以下特征的系统或非暂态计算机可读存储器装置,除非明显相互排斥,否则所述特征可以彼此结合使用:i)经由至少一个图像传感器获取人的眼睛的至少图像;ii)根据所述眼睛的所述至少图像来确定所述眼睛的虹膜的位置;iii)根据所述眼睛的所述至少图像来确定抽吸环的位置;iv)经由显示器显示所述眼睛的所述至少图像;vi)经由所述显示器显示在所述眼睛的所述至少图像上的指示所述眼睛的虹膜的位置的第一图形叠层;vii)经由所述显示器显示在所述眼睛的所述至少图像上的指示所述抽吸环的位置的第二图形叠层;viii)根据所述眼睛的所述至少图像来确定多个虹膜结构;ix)至少基于来自所述眼睛的所述至少图像的所述多个虹膜结构来确定所述眼睛的取向;x)经由所述显示器显示指示所述眼睛的取向的信息;xi)经由所述显示器显示表示与所述眼睛的取向相关联的标线的图形叠层;xii)经由所述显示器显示表示与所述抽吸环的取向相关联的标线的图形叠层;xiii)根据所述眼睛的所述至少图像来确定所述眼睛的瞳孔的位置;xiv)经由所述显示器显示在所述眼睛的所述至少图像上的指示所述眼睛的瞳孔的位置的图形叠层;xv)至少基于来自所述眼睛的所述至少图像的所述多个虹膜结构来确定至少一个切口部位;xvi)经由所述显示器显示指示所述至少一个切口部位的图形叠层;以及xvii)确定相对于所述眼睛的瞳孔的中心距所述多个虹膜结构中的某个虹膜结构的角度测量值。
9.上述任何系统都能够执行上述任何方法,并且上述任何非暂态计算机可读存储器装置都能够使系统执行上述任何方法。可以在上述任何系统上或使用上述任何非暂态计算机可读存储器装置来实现上述任何方法。
10.应该理解的是,前述总体描述和以下详细描述本质上都是示例和解释性的,并且旨在提供对本公开的理解,而不限制本公开的范围。就此而言,通过以下详细说明,本公开的附加方面、特征以及优点对于本领域技术人员而言将是明显的。
附图说明
11.为了更加完整地理解本公开及其特征和优点,现在参考结合附图进行的以下说明,这些附图并未按比例绘制,在这些附图中:
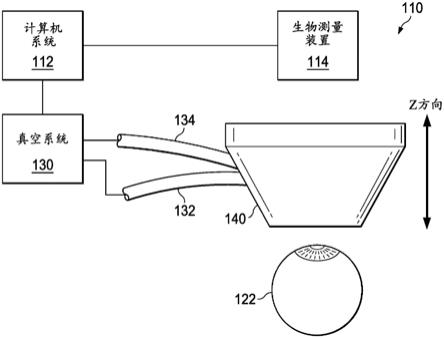
12.图1a展示了医疗系统的示例;
13.图1b展示了生物测量装置的示例;
14.图1c展示了在x方向上倾斜的眼睛的示例;
15.图1d展示了在y方向上倾斜的眼睛的示例;
16.图1e展示了在x方向上偏离中心的抽吸环的示例;
17.图1f展示了在y方向上偏离中心的抽吸环的示例;
18.图1g展示了正确放置的抽吸环的示例;
19.图1h展示了正确放置的抽吸环的另一个示例;
20.图1i展示了医疗系统的第二示例;
21.图1j展示了倾斜并正确放置的抽吸环和抽吸锥体的示例;
22.图2a展示了医疗系统的另一个示例;
23.图2b展示了显微镜集成显示器的示例;
24.图3a展示了眼睛的虹膜的叠层的示例;
25.图3b展示了眼睛的叠层的第二示例;
26.图3c展示了眼睛的叠层的第三示例;
27.图3d展示了眼睛的叠层的第四示例;
28.图3e展示了眼睛的叠层的第五示例;
29.图3f展示了眼睛的叠层的第六示例;
30.图3g展示了眼睛的叠层的另一个示例;
31.图4a和图4b展示了多个虹膜结构的示例;
32.图4c至图4e展示了指示切口部位的示例;
33.图4f展示了显示指示相应多个切口部位的多个叠层的示例;
34.图5展示了计算机系统的示例;
35.图6a展示了系统的操作方法的示例;以及
36.图6b展示了系统的操作方法的另一个示例。
具体实施方式
37.在以下说明中,通过举例的方式阐述了细节以便于讨论所公开的主题。然而,对于本领域普通技术人员而言明显的是,所公开的实施例是示例性的并且不是对所有可能的实施例的穷举。
38.如本文所使用的,附图标记指代实体的类别或类型,并且在这种附图标记之后的任何字母指代这个类别或类型的特定实体的具体示例。因此,例如,用
‘
12a’指代的假设实体可以指代特定类别/类型的特定示例,并且总体上,标记
‘
12’可以指代属于这个特定类别/类型的示例的集合、或这个特定类别/类型的任何一个示例。
39.在医疗程序(例如,眼科手术程序)开始时,患者可以面向上地被放置在支撑件上。例如,支撑件可以是或包括沙发、桌子或床等。在医疗程序之前,对接设备的一个或多个部
件可以对接到患者的眼睛。例如,对接设备的该一个或多个部件可以包括抽吸环、抽吸锥体和透镜等中的一个或多个。激光眼睛手术系统可以包括抽吸锥体和透镜等。例如,激光眼睛手术系统可以包括飞秒激光器,该飞秒激光器可以包括抽吸锥体和透镜等。
40.外科医生可以手动地将抽吸环定位在眼睛上。例如,外科医生可以在没有引导系统帮助的情况下将抽吸环放置在眼睛上。错误放置的抽吸环可能会导致眼睛倾斜。例如,如果眼睛倾斜,医疗程序(例如,手术程序)可能不会完全有效,因为抽吸环以眼睛的光轴为中心。当医疗程序包括一个或多个屈光切口时,如果眼睛倾斜,则医疗程序可能不会完全有效。
41.医师可以利用引导系统将抽吸环放置在眼睛上。例如,引导系统可以帮助医师将抽吸环放置在眼睛上,使得抽吸环与眼睛的光轴对准或接近对准。眼睛的光轴可以与眼睛的瞳孔的中心相关联。例如,利用引导系统将抽吸环放置在眼睛上可以提供一个或多个优点,其可以包括引导医师放置与眼睛的光轴对准或接近对准的抽吸环以及放置与眼睛旋转对准或接近旋转对准的抽吸环,等。
42.患者的眼睛可能不是不动的。例如,患者的眼睛可能在对接过程期间移动。患者的眼睛可以在对接过程期间向左和/或向右移动,可以在对接过程期间向上和/或向下移动,和/或可以在对接过程期间顺时针和/或逆时针旋转。在对接过程期间,引导系统可以确定患者的眼睛的一个或多个移动。例如,引导系统可以跟踪患者的眼睛。跟踪患者的眼睛可以包括在患者的眼睛的一个或多个移动期间和/或之后确定患者的眼睛的一个或多个位置。例如,引导系统可以显示指示在患者的眼睛的一个或多个移动期间和/或之后患者的眼睛的一个或多个位置的信息。指示在患者的眼睛的一个或多个移动期间和/或之后患者的眼睛的一个或多个位置的信息可以帮助和/或引导医师将抽吸环对接到患者的眼睛。例如,指示在患者的眼睛的一个或多个移动期间和/或之后患者的眼睛的一个或多个位置的信息可以显示在患者的眼睛的一个或多个图像上。引导系统可以用指示在患者的眼睛的一个或多个移动期间和/或之后患者的眼睛的一个或多个位置的信息来增强患者的眼睛的一个或多个图像。例如,引导系统可以包括增强现实(ar)系统、ar方法和/或ar过程的一个或多个结构和/或一个或多个功能。如下文进一步描述的,医疗系统可以包括引导系统的一个或多个结构和/或功能。例如,医疗系统可以帮助和/或引导医师将抽吸环对接到患者的眼睛。
43.现在转到图1a,展示了医疗系统的第一示例。如图所示,医疗系统110可以包括计算机系统112。如图所示,医疗系统110可以包括生物测量装置114。如图所示,生物测量装置114可以通信地联接至计算机系统112。如图所示,医疗系统110可以包括真空系统130。如图所示,真空系统130可以通信地联接至计算机系统112。例如,计算机系统可以控制真空系统130。真空系统130可以经由管线132和134中的一个或多个产生一个或多个低压。例如,真空系统130可以经由管线134产生一个或多个低压以将抽吸环140贴附和/或密封到患者的眼睛122。如图所示,医疗系统110可以包括管线132和134以及抽吸环140。
44.现在转到图1b,展示了生物测量装置的示例。如图所示,生物测量装置114可以包括图像传感器160a
‑
160c。例如,图像传感器160可以包括相机。如图所示,生物测量装置114可以包括光投射器162a
‑
162c。在一个示例中,光投射器162可以投射可见光。在另一个示例中,光投射器162可以投射红外光。光投射器162可以将圆和/或点投射到患者的眼睛上。图像传感器160可以接收投射到患者的眼睛上的圆和/或点的反射。计算机系统可以至少基于
投射到患者的眼睛上的圆和/或点的反射来确定与患者的眼睛相关联的一个或多个位置和/或一个或多个模板。如图所示,生物测量装置114可以包括深度传感器164a
‑
164c。深度传感器164可以包括光投射器162。深度传感器164可以包括光学传感器。如图所示,生物测量装置114可以包括光学低相干反射计(olcr)装置166。如图所示,生物测量装置114可以包括波前装置168。
45.波前装置168可以包括光源和波前传感器等中的一个或多个。光源可以向眼睛122提供第一光波。波前传感器可以从眼睛122接收至少基于第一光波的第一扰动光波。在一个示例中,波前装置168可以至少基于第一扰动光来确定第一光学矫正。在另一个示例中,计算机系统可以至少基于第一扰动光来确定第一光学矫正。波前装置168可以至少基于第一扰动光波向计算机系统提供数据。例如,计算机系统可以至少基于来自波前装置168的数据来确定第一光学矫正。
46.可以组合图像传感器160、光投射器162、深度传感器164、olcr装置166和波前装置168中的任何两个或更多个。图像传感器160a
‑
160c中的一个或多个、光投射器162a
‑
162c中的一个或多个、深度传感器164a
‑
164c中的一个或多个、olcr装置166和/或波前装置168等可以产生可以被计算机系统利用的数据。
47.现在转到图1c,展示了在x方向上倾斜的眼睛的示例。如图所示,眼睛122可以相对于x方向倾斜。例如,如果抽吸环140在z方向上直接降低,则抽吸环140可能不会正确地放置在眼睛122上。
48.现在转到图1d,展示了在y方向上倾斜的眼睛的示例。如图所示,眼睛122可以相对于y方向倾斜。例如,如果抽吸环140在z方向上直接降低,则抽吸环140可能不会正确地放置在眼睛122上。
49.现在转到图1e,展示了在x方向上偏离中心的抽吸环的示例。如图所示,抽吸环140可以在x方向上偏离眼睛122的光轴150。例如,如果抽吸环140在z方向上直接降低,则抽吸环140可能不会正确地放置在眼睛122上。
50.现在转到图1f,展示了在y方向上偏离中心的抽吸环的示例。如图所示,抽吸环140可以在y方向上偏离眼睛122的光轴150。例如,如果抽吸环140在z方向上直接降低,则抽吸环140可能不会正确地放置在眼睛122上。
51.现在转到图1g,展示了正确放置的抽吸环的示例。如图所示,抽吸环140可以正确地放置在眼睛122上。例如,抽吸环140可以相对于光轴150正确地放置在眼睛122上。如图所示,抽吸环140可以与眼睛122对接。
52.现在转到图1h,展示了正确放置的抽吸环的另一个示例。如图所示,抽吸环140可以正确地放置在眼睛122上。在一个示例中,眼睛122可能在x方向上倾斜。在另一个示例中,眼睛122可能在y方向上倾斜。即使眼睛122可能在x方向上倾斜和/或可能在y方向上倾斜,抽吸环140也可以正确地放置在眼睛122上。例如,当抽吸环140相对于光轴150如图所示放置时,抽吸环140可以正确地放置在眼睛122上。如图所示,抽吸环140可以与眼睛122对接。
53.现在转到图1i,展示了医疗系统的第二示例。如图所示,医疗系统110可以包括抽吸锥体170。例如,抽吸锥体170可以是或包括扁平锥体。如图所示,计算机系统112可以联接至抽吸锥体170的控制装置174。例如,计算机系统112可以经由控制装置174控制抽吸锥体170。在抽吸环140与眼睛122对接之后,抽吸锥体170可以与抽吸环140对接。如图所示,抽吸
锥体170可以包括透镜172。虽然透镜172被展示为平坦的或平面的,但透镜172可以包括凹形形状和/或可以包括凸形形状。
54.现在转到图1j,展示了倾斜的并正确放置的抽吸环和抽吸锥体的示例。如图所示,抽吸环140可以正确地放置在眼睛122上。在一个示例中,眼睛122可能在x方向上倾斜。在另一个示例中,眼睛122可能在y方向上倾斜。即使眼睛122可能在x方向上倾斜和/或可能在y方向上倾斜,抽吸环140也可以正确地放置在眼睛122上。例如,当抽吸环140相对于光轴150如图所示放置时,抽吸环140可以正确地放置在眼睛122上。如图所示,抽吸环140可以与眼睛122对接。如图所示,抽吸锥体170可以与抽吸环140对接,使得抽吸环140和抽吸锥体170两者都与光轴150对准。
55.现在转到图2a,展示了医疗系统的另一个示例。如图所示,外科医生210可以利用医疗系统110。例如,外科医生210可以在涉及患者120的眼睛122的手术中利用系统110。系统110可以包括多个系统。如图所示,系统110可以包括切割系统215a。例如,外科医生210可以在切割眼睛122时利用系统215a。眼睛122可以包括患者120的眼睛的角膜瓣。如图所示,系统110可以包括整形系统215b。例如,外科医生210可以利用整形系统215b对患者120的角膜的内部部分进行消融。
56.如图所示,系统215a可以包括显示器116a。如图所示,系统215a可以包括显微镜显示器250a。例如,显微镜显示器250a可以包括显微镜集成显示器(mid)。系统215a可以包括图像传感器160a
‑
160c中的一个或多个、光投射器162a
‑
162c中的一个或多个、深度传感器164a
‑
164c中的一个或多个、olcr装置166和/或波前装置168等。系统215a可以包括抽吸环150、抽吸锥体170和真空系统130等中的一个或多个。如图所示,系统215b可以包括显示器116b。如图所示,系统215b可以包括显微镜显示器250b。例如,显微镜显示器250b可以包括mid。系统215b可以包括图像传感器160a
‑
160c中的一个或多个、光投射器162a
‑
162c中的一个或多个、深度传感器164a
‑
164c中的一个或多个、olcr装置166和/或波前装置168等。
57.系统215a可以包括激光器(比如飞秒激光器),该激光器可以使用短激光脉冲来消融一系列较小的角膜组织部分以形成可以被提起以暴露角膜的内部部分的瓣。可以使用切割装置显示器116a和250a中的一者或两者连同控制装置和计算机系统112a来计划和切割瓣。如图所示,系统215a可以包括计算机系统112a。例如,计算机系统112a可以联接至系统215a的图像传感器160a
‑
160c中的一个或多个、光投射器162a
‑
162c中的一个或多个、深度传感器164a
‑
164c中的一个或多个、olcr装置166和/或波前装置168等。如图所示,系统215b可以包括计算机系统112b。例如,计算机系统112b可以联接至系统215b的图像传感器160a
‑
160c中的一个或多个、光投射器162a
‑
162c中的一个或多个、深度传感器164a
‑
164c中的一个或多个、olcr装置166和/或波前装置168等。
58.系统215a和215b可以如图2b所示物理地分离。患者120可以在系统215a与215b之间移动。可替代地,患者120可以保持静止,而系统215a和215b可以移动至患者120。系统215a和215b可以物理地组合成单个整体装置,使得在系统215a与215b之间切换时,装置和患者120均无需重新定位。
59.系统110可以包括用于控制系统215a和215b的一个或多个控制装置。例如,该一个或多个控制装置可以包括以下各项中的一项或多项:交互式显示器(比如触屏显示器)、键盘、鼠标、触摸板、按键、操纵杆、脚踏板、平视显示器、虚拟现实眼镜、或能够与用户(比如医
务人员)交互的其他装置。
60.系统110可以包括至少一个计算机系统,该至少一个计算机系统被配置为生成在显示器116a、250a、116b和250b等中的至少一个上呈现的图像。例如,该至少一个计算机系统可以包括计算机系统112a和112b中的一个或多个。计算机系统112a和112b中的一个或多个可以联接至观察装置,比如显微镜、相机、光学相干断层扫描(oct)装置或显示器、或者能够测量进行手术的眼睛的位置的另一个装置。计算机系统112a和112b中的一个或多个可以联接至控制装置中的一个或多个。
61.在一个示例中,切割装置计算机系统112a:i)可以联接至当患者120定位成与系统215a在一起时观察眼睛122的观察装置,ii)可以将关于所计划的瓣位置和所计划的消融区域的图形信息提供给显示器116a和250a中的一个或多个,并且iii)可以联接至系统215a的一个或多个控制装置。在第二示例中,整形装置计算机112b:i)可以联接至当患者120定位成与整形装置在一起时观察眼睛122的观察装置,ii)可以将关于所计划的瓣位置和所计划的消融区域的图形信息提供给显示器1160b和250b中的一个或多个,并且iii)可以联接至系统215b的一个或多个控制装置。在另一个示例中,计算机系统可以包括上面关于计算机系统112a和112b描述的特性和/或属性。
62.系统110的计算机系统可以以有线方式或无线方式联接至系统110的另一个部分。系统110的一个或多个计算机系统的数据可以存储在数据库中(本地存储、经由远程计算机系统存储、和/或经由远程数据中心存储),该数据库存储患者数据、治疗计划、和/或与医学治疗和/或系统110相关联的其他信息。在一个示例中,数据库可以包括关系数据库。在第二示例中,数据库可以包括图形数据库。在另一个示例中,数据库可以包括“不仅仅是sql(not only sql)”(nosql)数据库。
63.系统110可以输入关于患者和要对该患者执行的或实际对该患者执行的治疗的信息。系统110可以允许用户输入和查看关于患者和要对该患者执行的治疗的信息。这种数据可以包括关于患者的信息(比如识别信息、患者的病史)和/或关于正在治疗的眼睛122的信息等。这种数据可以包括关于治疗计划的信息,比如角膜切割的形状和位置、消融的形状和/或位置等。
64.现在转到图2b,展示了显微镜集成显示器的示例。如图所示,mid 250可以包括显示器262a和262b。例如,外科医生210可以看向多个接目镜,并且显示器262a和262b可以向外科医生210显示信息。虽然mid 250被示出具有多个显示器,但mid 250可以包括单个显示器262。例如,mid 250可以被实现为具有一个或多个显示器262。显示器262可以对显示器116可以显示的任何图像和/或任何信息进行显示。如图所示,mid 250可以包括图像传感器272a和272b。在一个示例中,图像传感器272a和272b可以获取图像。在第二示例中,图像传感器272a和272b可以包括相机。在另一个示例中,图像传感器272可以经由可见光、红外光、以及紫外光等中的一种或多种来获取图像。一个或多个图像传感器272a和272b可以向计算机系统112提供图像数据。虽然mid 250被示出为具有多个图像传感器,但mid 250可以包括单个图像传感器272。例如,mid 250可以被实施为具有一个或多个图像传感器272。
65.如图所示,mid 250可以包括距离传感器274a和274。例如,距离传感器274可以确定距手术工具器械220的距离。距离传感器274可以确定与z轴相关联的距离。虽然mid 250被示为具有多个图像传感器,但是mid 250可以包括单个距离传感器274。在一个示例中,
mid 250可以被实施为具有一个或多个距离传感器274。在另一个示例中,mid 250可以被实施为没有距离传感器。如图所示,mid 250可以包括透镜276a和276b。虽然mid 250被示出为具有多个透镜276a和276b,但是mid 250可以包括单个透镜276。例如,mid 250可以被实施为具有一个或多个透镜276。如图所示,mid 250可以包括照明器278a和278b。例如,照明器278可以提供和/或产生可见光、红外光、以及紫外光等中的一种或多种。虽然mid 250被示为具有多个照明器,但是mid 250可以包括单个照明器278。例如,mid 250可以被实施为具有一个或多个照明器278。
66.照明器278可以提供红外光。计算机系统112可以至少基于反射的红外光来接收图像数据。例如,图像传感器272可以接收反射的红外光并且可以至少基于反射的红外光向计算机系统112提供数据。照明器278可以提供白光。计算机系统112可以至少基于反射的白光来接收图像数据。例如,图像传感器272可以接收反射的白光并且可以至少基于反射的白光向计算机系统112提供数据。照明器278可以提供紫外光。计算机系统112可以至少基于反射的紫外光来接收图像数据。例如,图像传感器272可以接收反射的紫外光并且可以至少基于反射的紫外光向计算机系统112提供数据。mid 250可以包括如参考生物测量装置114所描述的一个或多个结构和/或一个或多个功能。在一个示例中,mid 250可以包括olcr装置166。在另一个示例中,mid 250可以包括波前装置168。
67.例如,手术工具器械可以用一个或多个图案来标记。该一个或多个图案可以用于标识手术工具器械。该一个或多个图案可以包括散列图案、条纹图案、以及分形图案等中的一个或多个。作为另一个示例,手术工具器械可以用染料和/或涂料来标记。染料和/或涂料可以反射可见光、红外光、以及紫外光等中的一种或多种。在一个示例中,照明器278可以提供紫外光,并且图像传感器272可以接收从手术工具器械反射的紫外光。计算机系统112可以从图像传感器272接收至少基于从手术工具器械反射的紫外光的图像数据,并且可以利用至少基于从手术工具器械反射的紫外光的图像数据来从由图像传感器272提供的其他图像数据中标识手术工具器械。在另一个示例中,照明器278可以提供红外光,并且图像传感器272可以接收从手术工具器械反射的红外光。计算机系统112可以从图像传感器272接收至少基于从手术工具器械反射的红外光的图像数据,并且可以利用至少基于从手术工具器械反射的红外光的图像数据来从由图像传感器272提供的其他图像数据中标识手术工具器械。
68.现在转到图3a,展示了眼睛的虹膜的叠层的示例。如图所示,显示器116可以显示眼睛122的图像310。系统110可以确定眼睛122的虹膜的图像314。如图所示,显示器116可以显示叠层320。例如,叠层320可以标记眼睛122的虹膜的图像314的外边界。叠层320可以相对于眼睛122的瞳孔的图像312居中。系统110可以经由计算机视觉方法、计算机视觉过程和计算机视觉系统等中的一个或多个来确定叠层320。叠层320的一个或多个位置可以至少基于眼睛122的一个或多个移动来改变和/或更新。
69.现在转到图3b,展示了眼睛的叠层的第二示例。如图所示,叠层322可以围绕叠层320。例如,叠层322可以增强叠层320。叠层322的一个或多个位置可以至少基于眼睛122的一个或多个移动来改变和/或更新。
70.现在转到图3c,展示了眼睛的叠层的第三示例。如图所示,显示器116可以显示叠层330a。例如,叠层330a可以表示抽吸环140的对准。如果抽吸环140在z方向上移动到眼睛
122,则叠层330a可以表示抽吸环140的对准。如图所示,叠层330a指示抽吸环140可能没有正确对准。在一个示例中,眼睛122可能在x方向上倾斜,如图1c所示。在另一个示例中,抽吸环140可以在x方向上偏离眼睛122的光轴150,如图1e所示。叠层330a的一个或多个位置可以至少基于抽吸环140的一个或多个移动来改变和/或更新。
71.现在转到图3d,展示了眼睛的叠层的第四示例。如图所示,显示器116可以显示叠层330b。例如,叠层330b可以表示抽吸环140的对准。如果抽吸环140在z方向上移动到眼睛122,则叠层330b可以表示抽吸环140的对准。如图所示,叠层330b指示抽吸环140可能没有正确对准。在一个示例中,眼睛122可能在y方向上倾斜,如图1d所示。在另一个示例中,抽吸环140可以在y方向上偏离眼睛122的光轴150,如图1f所示。叠层330b的一个或多个位置可以至少基于抽吸环140的一个或多个移动来改变和/或更新。
72.现在转到图3e,展示了眼睛的叠层的第五示例。如图所示,显示器116可以显示叠层324a。例如,叠层324a可以与眼睛122的瞳孔的图像312和眼睛122的虹膜的图像314等中的一个或多个对准。叠层324a可以与眼睛122的瞳孔的图像312的中心对准。叠层324a可以与眼睛122的虹膜的图像314的一个或多个结构对准。叠层324a可以传达和/或引导抽吸环140的放置和/或位置。
73.如图所示,显示器116可以显示叠层334a。例如,叠层334a可以表示抽吸环140的对准。如果抽吸环140在z方向上移动到眼睛122,则叠层334a可以表示抽吸环140的对准。例如,叠层334a可以表示标线(例如,十字准线)。如图所示,叠层334a指示抽吸环140可能没有正确对准。在一个示例中,眼睛122可能在x方向上倾斜,如图1c所示。在第二示例中,眼睛122可能在y方向上倾斜,如图1d所示。在第三示例中,抽吸环140可以在x方向上偏离眼睛122的光轴150,如图1e所示。在另一个示例中,抽吸环140可以在y方向上偏离眼睛122的光轴150,如图1f所示。叠层324a的一个或多个位置可以至少基于眼睛122的一个或多个移动来改变和/或更新。叠层334a的一个或多个位置可以至少基于抽吸环140的一个或多个移动来改变和/或更新。
74.现在转到图3f,展示了眼睛的叠层的第六示例。如图所示,显示器116可以显示叠层324a。例如,叠层324a可以与眼睛122的瞳孔的图像312和眼睛122的虹膜的图像314等中的一个或多个对准。叠层324a可以与眼睛122的瞳孔的图像312的中心对准。叠层324a可以与眼睛122的虹膜的图像314的一个或多个结构对准。叠层324a可以传达和/或引导抽吸环140的放置和/或位置。
75.如图所示,显示器116可以显示叠层334b。例如,叠层334b可以表示抽吸环140的对准。如果抽吸环140在z方向上移动到眼睛122,则叠层334b可以表示抽吸环140的对准。例如,叠层334b可以表示标线(例如,十字准线)。如图所示,叠层334b指示抽吸环140可能没有正确对准。在一个示例中,眼睛122可能在x方向上倾斜,如图1c所示。在第二示例中,眼睛122可能在y方向上倾斜,如图1d所示。在第三示例中,抽吸环140可以在x方向上偏离眼睛122的光轴150,如图1e所示。在第四示例中,抽吸环140可以在y方向上偏离眼睛122的光轴150,如图1f所示。在另一个示例中,抽吸环140可以被旋转。叠层324a的一个或多个位置可以至少基于眼睛122的一个或多个移动来改变和/或更新。叠层334b的一个或多个位置可以至少基于抽吸环140的一个或多个移动来改变和/或更新。
76.现在转到图3g,展示了眼睛的叠层的另一个示例。如图所示,显示器116可以显示
叠层324b。例如,叠层324b可以与眼睛122的瞳孔的图像312和眼睛122的虹膜的图像314等中的一个或多个对准。叠层324b可以与眼睛122的瞳孔的图像312的中心对准。叠层324b可以与眼睛122的虹膜的图像314的一个或多个结构对准。叠层324b可以传达和/或引导抽吸环140的放置和/或位置。
77.眼睛122可以围绕光轴150旋转。在一个示例中,眼睛122可能表现出扭转运动。在另一个示例中,眼睛122可能表现出轮转旋转(cyclorotation)。叠层324b可以指示眼睛122的一个或多个旋转。例如,叠层324b可以指示眼睛122围绕光轴150的一个或多个旋转。叠层324b可以指示眼睛122围绕光轴150旋转、眼睛122在x方向上的倾斜、以及眼睛122在y方向上的倾斜等中的一个或多个。
78.如图所示,显示器116可以显示叠层334a。例如,叠层334a可以表示抽吸环140的对准。如果抽吸环140在z方向上移动到眼睛122,则叠层334a可以表示抽吸环140的对准。例如,叠层334a可以表示标线(例如,十字准线)。如图所示,叠层334a指示抽吸环140可能没有正确对准。在一个示例中,眼睛122可能在x方向上倾斜,如图1c所示。在第二示例中,眼睛122可能在y方向上倾斜,如图1d所示。在第三示例中,抽吸环140可以在x方向上偏离眼睛122的光轴150,如图1e所示。在第四示例中,抽吸环140可以在y方向上偏离眼睛122的光轴150,如图1f所示。在另一个示例中,抽吸环140可以被旋转。叠层324b的一个或多个位置可以至少基于眼睛122的一个或多个移动来改变和/或更新。叠层334a的一个或多个位置可以至少基于抽吸环140的一个或多个移动来改变和/或更新。
79.现在转到图4a和图4b,展示了多个虹膜结构的示例。如图所示,眼睛122的虹膜400可以包括虹膜结构434a
‑
434c。例如,系统110可以确定虹膜结构434a
‑
434c。可以确定与虹膜结构434a
‑
434c相关联的一个或多个测量值。在一个示例中,可以确定一个或多个测量值410
‑
414。在另一个示例中,可以确定一个或多个测量值θ1和θ2。系统110可以确定一个或多个测量值410
‑
414和/或一个或多个测量值θ1和θ2等。例如,系统110可以确定相对于眼睛122的瞳孔405的一个或多个测量值410
‑
414和/或一个或多个测量值θ1和θ2等。系统110可以确定相对于眼睛122的瞳孔405的中心的一个或多个测量值410
‑
414和/或一个或多个测量值θ1和θ2等,如图所示。
80.虹膜结构434a
‑
434c中的一个或多个可以用于确定一个或多个叠层320、322、324a、324b、330a、330b、334a和334b等的一个或多个位置。在一个示例中,系统110可以利用虹膜结构434a
‑
434c中的一个或多个来确定一个或多个叠层320、322、324a、324b、330a、330b、334a和334b等的一个或多个位置。在另一个示例中,系统110可以利用虹膜结构434a
‑
434c中的一个或多个来确定一个或多个测量值410
‑
414和/或一个或多个测量值θ1和θ2等。在确定一个或多个叠层320、322、324a、324b、330a、330b、334a和334b等的一个或多个位置时,相应的一个或多个虹膜结构434a
‑
434c的一个或多个位置可以用作相应的一个或多个参考位置。
81.如图所示,测量值410可以包括从瞳孔405的中心到虹膜结构434a的距离测量值。如图所示,测量值412可以包括从瞳孔405的中心到虹膜结构434b的距离测量值。如图所示,测量值414可以包括从瞳孔405的中心到虹膜结构434c的距离测量值。如图所示,θ1可以包括虹膜结构434a和虹膜结构434b相对于瞳孔405的中心的角度测量值。例如,θ1可以包括虹膜结构434a与虹膜结构434b之间相对于瞳孔405的中心的角度测量值。如图所示,θ2可以包
括虹膜结构434a和虹膜结构434c相对于瞳孔405的中心的角度测量值。例如,θ2可以包括虹膜结构434a与虹膜结构434c之间相对于瞳孔405的中心的角度测量值。在确定一个或多个叠层320、322、324a、324b、330a、330b、334a和334b等的一个或多个位置时,系统110可以利用测量值410
‑
414中的一个或多个和/或一个或多个测量值θ1和θ2等。
82.现在转到图4c至图4e,展示了指示切口部位的示例。如图4c所示,显示器116可以显示可以指示第一切口部位的叠层440。在一个示例中,叠层440可以位于相对于眼睛122的瞳孔405的中心距虹膜结构434a的角度测量值θ3处。在另一个示例中,叠层440可以位于距眼睛122的瞳孔405的中心的距离测量值450处。如图4d所示,显示器116可以显示可以指示第二切口部位的叠层442。在一个示例中,叠层442可以位于相对于眼睛122的瞳孔405的中心距虹膜结构434a的角度测量值θ4处。在另一个示例中,叠层442可以位于距眼睛122的瞳孔405的中心的距离测量值452处。
83.系统110可以利用虹膜结构434a
‑
434c中的一个或多个来确定一个或多个叠层440和442等的一个或多个位置。在一个示例中,系统110可以利用距虹膜结构434a的角度测量值θ3来显示叠层440。在另一个示例中,系统110可以利用距虹膜结构434a的角度测量值θ4来显示叠层442。
84.叠层440可以与角度测量值θ5和距离测量值450等中的一个或多个相关联,如图4e所示。例如,叠层440可以是或包括弧。叠层442可以与角度测量值θ6和距离测量值452等中的一个或多个相关联,如图4e所示。例如,叠层442可以是或包括弧。显示器416可以显示叠层440和442,如图4f所示。例如,显示器416可以同时显示叠层440和442。叠层440和442中的一个或多个可以帮助医师和/或外科医生找到一个或多个相应的切口部位。
85.现在转到图5,展示了计算机系统的示例。如图所示,计算机系统500可以包括处理器510、易失性存储器介质520、非易失性存储器介质530和输入/输出(i/o)装置540。如图所示,易失性存储器介质520、非易失性存储器介质530和i/o装置540可以通信地联接至处理器510。
86.术语“存储器介质”可以意指“存储器”、“存储装置”、“存储器装置”、“计算机可读介质”、和/或“有形计算机可读存储介质”。例如,存储介质可以包括但不限于以下存储介质:例如直接存取存储装置(包括硬盘驱动器)、顺序存取存储装置(例如磁带磁盘驱动器)、光盘(cd)、随机存取存储器(ram)、只读存储器(rom)、cd
‑
rom、数字通用盘(dvd)、电可擦除可编程只读存储器(eeprom)、闪存、非易失性介质、和/或以上介质的一个或多个组合。如图所示,非易失性存储器介质530可以包括处理器指令532。处理器指令532可以由处理器510执行。在一个示例中,处理器指令532的一个或多个部分可以经由非易失性存储器介质530来执行。在另一个示例中,处理器指令532的一个或多个部分可以经由易失性存储器介质520来执行。处理器指令532中的一个或多个部分可以被传送至易失性存储器介质520。
87.在至少实施本文所描述的一个或多个系统、一个或多个流程图、一个或多个过程和/或一个或多个方法的一部分时,处理器510可以执行处理器指令532。例如,可以用至少根据本文所描述的一个或多个系统、一个或多个流程图、一个或多个方法和/或一个或多个过程的一部分的指令来配置、编码(coded)和/或编码(encoded)处理器指令532。尽管处理器510被展示为单个处理器,但是处理器510可以是或包括多个处理器。存储介质和存储器介质中的一个或多个可以是软件产品、程序产品、和/或制品。例如,可以用可由处理器执行
的至少根据本文所描述的一个或多个系统、一个或多个流程图、一个或多个方法和/或一个或多个过程的一部分的指令来配置、编码(coded)和/或编码(encoded)软件产品、程序产品和/或制品。
88.处理器510可以包括可操作来解释并且执行存储在存储器介质中和/或经由网络接收的程序指令、过程数据、或二者的任何合适的系统、装置、或设备。处理器510进一步可以包括一个或多个微处理器、微控制器、数字信号处理器(dsp)、专用集成电路(asic)、或被配置成用于解释并且执行程序指令、过程数据、或二者的其他电路系统。
89.i/o装置540可以包括任何一个或多个工具,所述工具通过促进用户输入和向用户输出而允许、准许、和/或使得用户能够与计算机系统500以及其相关联部件进行交互。促进用户输入可以允许用户操纵和/或控制计算机系统500,并且促进向用户输出可以允许计算机系统500指示用户的操纵和/或控制的效果。例如,i/o装置540可以允许用户向计算机系统500输入数据、指令、或二者并且以其他方式操纵和/或控制计算机系统500以及其相关联部件。i/o装置可以包括用户接口装置,比如键盘、鼠标、触摸屏、操纵杆、手持镜头、工具跟踪装置、坐标输入装置或适合与系统一起使用的任何其他i/o装置。
90.i/o装置540可以包括一个或多个总线、一个或多个串行装置和/或一个或多个网络接口等,其可以促进和/或准许处理器510至少实施本文所描述的一个或多个系统、过程和/或方法的一部分。在一个示例中,i/o装置540可以包括可以促进和/或准许处理器510与外部存储器通信的存储接口。存储接口可以包括通用串行总线(usb)接口、sata(串行ata)接口、pata(并行ata)接口、以及小型计算机系统接口(scsi)等中的一个或多个。在第二示例中,i/o装置540可以包括可以促进和/或准许处理器510与网络通信的网络接口。i/o装置540可以包括无线网络接口和有线网络接口中的一个或多个。在第三示例中,i/o装置540可以包括外围部件互连(pci)接口、pci express(pcie)接口、串行外围互连(spi)接口、以及内部集成电路(i2c)接口等中的一个或多个。在第四示例中,i/o装置540可以包括准许处理器510与一个或多个传感器进行数据通信的电路系统。在第五示例中,i/o装置540可以促进和/或准许处理器510与显示器550和mid 560等中的一个或多个进行数据通信。在另一个示例中,i/o装置540可以促进和/或准许处理器510与成像装置570进行数据通信。如图所示,i/o装置540可以联接至网络570。例如,i/o装置540可以包括网络接口。
91.网络570可以包括有线网络、无线网络、光网络或上述的组合等。网络570可以包括和/或联接至各种类型的通信网络。例如,网络570可以包括和/或联接至局域网(lan)、广域网(wan)、因特网、公共交换电话网(pstn)、蜂窝电话网、卫星电话网或上述组合等。wan可以包括私人wan、企业wan、公共wan或上述的组合等。
92.本文所描述的计算机系统可以包括如参考计算机系统500描述的一个或多个结构和/或一个或多个功能。在一个示例中,计算机系统112可以包括如参考计算机系统500描述的一个或多个结构和/或一个或多个功能。在另一个示例中,mid 250的计算机系统可以包括如参考计算机系统500描述的一个或多个结构和/或一个或多个功能。
93.现在转到图6a,展示了系统的操作方法的示例。在610,人的眼睛的至少一个图像可以经由至少一个图像传感器获取。在一个示例中,眼睛的该至少一个图像可以包括眼睛的多个图像。在另一个示例中,该至少一个图像传感器可以包括多个图像传感器。图像传感器可以是或包括相机。
94.在615,眼睛的虹膜的位置可以根据眼睛的至少图像来确定。眼睛的虹膜的位置可以包括与眼睛的瞳孔的边界。在620,抽吸环的位置可以根据眼睛的至少图像来确定。在625,眼睛的至少图像可以经由显示器显示。例如,眼睛122的至少图像310可以经由显示器116显示。尽管示例和图利用了显示器116、显示器116可以显示的任何(多个)图像和/或(多个)图形,但是除了显示器116之外或代替显示器116,mid 250的显示器262a和262b中的一个或多个也可以显示。
95.在630,第一图形叠层可以显示在眼睛的指示眼睛的虹膜的位置的至少图像上。例如,指示眼睛的虹膜的位置的图形叠层320可以显示在图像310上。第一图形叠层可以包括圆形形状。
96.在635,第二图形叠层可以显示在眼睛的指示抽吸环的位置的至少图像上。在一个示例中,指示抽吸环140的位置的图形叠层330a可以显示在图像310上,如图3c所示。在第二示例中,指示抽吸环140的位置的图形叠层330b可以显示在图像310上,如图3d所示。在第三示例中,指示抽吸环140的位置的图形叠层334a可以显示在图像310上,如图3e所示。在第四示例中,指示抽吸环140的位置的图形叠层334b可以显示在图像310上,如图3f所示。在另一个示例中,指示抽吸环140的位置的图形叠层334b可以显示在图像310上,如图3g所示。第二图形叠层可以包括圆形形状。
97.在640,多个虹膜结构可以根据眼睛的至少图像来确定。例如,多个虹膜结构434a
‑
434c可以根据图像310来确定。在645,眼睛的取向可以至少基于来自眼睛的至少图像的多个虹膜结构来确定。例如,眼睛122的取向可以至少基于多个虹膜结构434a
‑
434c来确定。眼睛122的取向可以包括倾斜。例如,倾斜可以是在x方向和/或y方向上。眼睛122的取向可以包括眼睛122的旋转。例如,眼睛122可以表现出轮转旋转。
98.在650,可以显示指示眼睛的取向的信息。在一个示例中,指示眼睛122的取向的信息可以包括图形叠层324a,如图3e和图3f中所示。在另一个示例中,指示眼睛122的取向的信息可以包括图形叠层324b,如图3g所示。
99.指示眼睛的取向的信息可以包括第三图形叠层,该第三图形叠层表示与眼睛的取向相关联的第一标线。在一个示例中,指示眼睛122的取向的信息可以包括图形叠层324a,该图形叠层表示与眼睛122的取向相关联的第一标线,如图3e和图3f所示。在另一个示例中,指示眼睛122的取向的信息可以包括图形叠层324b,该图形叠层表示与眼睛122的取向相关联的第一标线,如图3g所示。
100.在655,可以显示指示抽吸环的取向的信息。指示抽吸环的取向的信息可以包括第四图形叠层。在一个示例中,指示抽吸环140的取向的信息可以包括图形叠层334a,如图3e和图3g所示。在另一个示例中,指示抽吸环140的取向的信息可以包括图形叠层334b。
101.可以重复参考图6a所述的方法的示例。例如,眼睛122可能不会不动或不会保持不动。眼睛122可能在对接过程期间移动。眼睛122可能在对接过程期间向左和/或向右移动,可能在对接过程期间向上和/或向下移动,和/或可能在对接过程期间顺时针和/或逆时针旋转。利用参考图6a所述的方法的示例的系统,可以确定在对接过程期间眼睛122的一个或多个移动。利用参考图6a所述的方法的示例的系统,可以确定在对接过程期间抽吸环140的一个或多个移动。例如,系统可以跟踪眼睛122和/或抽吸环140。
102.现在转到图6b,展示了系统的操作方法的另一个示例。图6b的方法要素610
‑
650可
以根据图6a的方法要素610
‑
650来执行。在660,至少一个切口部位可以至少基于来自眼睛的至少图像的多个虹膜结构来确定。例如,至少一个切口部位可以至少基于多个虹膜结构434a
‑
434c来确定。一个或多个切口部位的一个或多个位置可以经由存储器装置存储。例如,一个或多个切口部位的该一个或多个位置可以是至少基于多个虹膜结构434a
‑
434c。
103.在665,角度测量值可以是相对于眼睛的瞳孔的中心距多个虹膜结构中的某个虹膜结构来确定的。在一个示例中,θ3可以是距虹膜结构434a来确定的,如图4c所示。在另一个示例中,θ4可以是距虹膜结构434a来确定的,如图4d所示。
104.在670,指示至少一个切口部位的第三图形叠层可以经由显示器显示。在一个示例中,指示至少一个切口部位的图形叠层440可以经由显示器116显示,如图4c所示。在另一个示例中,指示至少一个切口部位的图形叠层442可以经由显示器116显示,如图4d所示。图形叠层440和442可以经由显示器116显示,如图4f所示。例如,图形叠层440和442可以经由显示器116同时显示,如图4f所示。显示指示至少一个切口部位的第三图形叠层可以至少基于角度测量值。在一个示例中,显示图形叠层440可以至少基于θ3,如图4c所示。在另一个示例中,显示图形叠层442可以至少基于θ4,如图4d所示。
105.显示指示至少一个切口部位的第三图形叠层可以包括显示相应地指示至少一个切口部位的至少圆弧。在一个示例中,图形叠层440可以包括相应地指示至少一个切口部位的至少圆弧。在第二示例中,图形叠层442可以包括相应地指示至少一个切口部位的至少圆弧。在另一个示例中,图形叠层440和442可以包括相应地指示切口部位的圆弧。
106.可以重复参考图6b所述的方法的示例。例如,眼睛122可能不会不动或不会保持不动。眼睛122可能移动。眼睛122可能向左和/或向右移动,可能向上和/或向下移动,和/或可能顺时针和/或逆时针旋转。利用参考图6b所述的方法的示例的系统,可以确定眼睛122的一个或多个移动。例如,系统可以跟踪眼睛122和/或抽吸环140。
107.方法和/或过程要素中的一个或多个、和/或方法和/或处理器要素的一个或多个部分可以以不同的顺序执行、可以重复或可以省略。此外,可以根据需要实现、例示和/或执行附加的、补充的和/或重现的方法和/或过程要素。此外,根据需要可以省略一个或多个系统要素,和/或可以添加附加的系统要素。
108.存储器介质可以是和/或可以包括制品。例如,制品可以包括和/或可以是软件产品和/或程序产品。存储器介质可以被译码和/或编码成具有根据本文描述的一个或多个流程图、系统、方法、和/或过程的指令,用于生产所述制品。
109.以上所公开的主题应被认为是说明性而非限制性的,并且所附权利要求旨在覆盖所有此类修改、增强、以及落入本公开内容的真实精神和范围内的其他实施方式。因此,为了被法律最大程度地允许,本公开的范围将由以下权利要求及其等效物的最广泛允许的解读来确定、并且不应受限于或局限于上述详细说明。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1