超声和多能手术器械、系统以及用于密封、切割和/或感测组织的方法与流程
超声和多能手术器械、系统以及用于密封、切割和/或感测组织的方法
1.相关申请案的交叉引用
2.本技术案要求2019年3月26日申请的美国临时专利申请案第62/823,769号和第62/823,875号两者的权益和优先权,所述美国临时专利申请案中的每一个的全部内容特此以引用的方式并入本文中。
技术领域
3.本公开涉及手术器械、系统和方法。更具体地说,本公开涉及超声和多能手术器械、系统和用于密封、切割和/或感测组织的方法。
背景技术:
4.超声手术器械和系统利用超声能量,即超声振动来治疗组织。更具体地说,超声手术器械和系统利用以超声频率传输的机械振动能量来凝结、烧灼、熔合、密封、切割和/或干燥组织以实现止血。
5.超声手术器械通常采用换能器,所述换能器耦合到超声手术器械的手柄且配置成产生超声能量以沿着波导传输到超声手术器械的末端执行器,所述末端执行器设计成利用超声能量来治疗组织。换能器可由超声产生器驱动,所述超声产生器载于,例如在超声手术器械的手柄上或手柄内,或例如作为经由手术缆线连接到所述超声手术器械的机顶盒而远端安置。超声手术器械的末端执行器可包含:刀片,其接收来自波导的超声能量以施加到组织;以及夹钳构件,其配置成将组织夹持在刀片与夹钳构件之间以有助于治疗所述组织。
技术实现要素:
6.如本文所使用的,术语“远侧”是指所描述的距用户较远的部分,而术语“近侧”是指所描述的距用户较近的部分。此外,在一致的程度上,本文中所描述的任何或所有方面可与本文中所描述的任何或所有其它方面结合使用。
7.根据本公开的方面,提供一种超声手术器械,其包含壳体、由壳体支撑的超声换能器和从壳体远侧地延伸的细长组合件。细长组合件包含配置成可操作地耦合到超声换能器的波导。波导限定其远侧末端部分处的刀片。细长组合件进一步包含第一和第二面板以及夹钳,所述第一和第二面板以相对于刀片横向间隔开的关系安置于刀片的相对侧上且沿着刀片的长度的至少一部分延伸,所述夹钳可相对于刀片以及第一和第二面板在间隔开的位置与接近位置之间枢转。在接近位置中,刀片和夹钳配置成限定其间的第一距离且在第一夹持力下抓握其间的组织的中心部分,且夹钳以及第一和第二面板中的每一个配置成限定其间的大于第一距离的第二距离且在小于第一夹持压力的第二夹持压力下抓握其间的组织的外部侧向部分。在其它方面中,第二距离可大体上等于第一距离或小于第一距离,使得第二夹持压力大体上等于或大于第一夹持压力。
8.在本公开的方面中,刀片包含具有限定顶点的凸面配置的组织接触表面。在此类
方面中,在夹持位置中,刀片的组织接触表面和夹钳配置成抓握其间的组织的中心部分。
9.在本公开的另一方面中,相较于第一和第二面板的组织接触表面,刀片的组织接触表面的顶点朝向夹钳进一步延伸。
10.在本公开的再一方面中,夹钳包含结构主体和夹钳衬里。夹钳衬里限定组织接触表面,且结构主体限定安置于夹钳衬里的组织接触表面的两侧上的第一和第二组织接触表面。在此类方面中,在接近位置中,夹钳衬里的组织接触表面和刀片配置成抓握其间的组织的中心部分,且结构主体的第一和第二组织接触表面以及第一和第二面板分别配置成抓握其间的组织的外部侧向部分。
11.在本公开的又一方面中,结构主体的第一和第二组织接触表面相对于夹钳衬里的组织接触表面凹进。在其它方面中,结构主体的第一和第二组织接触表面相对于夹钳衬里的组织接触表面大体上水平,例如共面,或相较于夹钳衬里的组织接触表面朝向刀片进一步突出。
12.在本公开的又另一方面中,刀片包含具有限定顶点的凸面配置的组织接触表面,且夹钳包含结构主体和夹钳衬里。夹钳衬里限定组织接触表面,且结构主体限定安置于夹钳衬里的组织接触表面的两侧上的第一和第二组织接触表面。在此类方面中,在接近位置中,刀片的组织接触表面和夹钳衬里的组织接触表面配置成抓握其间的组织的中心部分,且结构主体的第一和第二组织接触表面以及第一和第二面板分别配置成抓握其间的组织的外部侧向部分。
13.在本公开的另一方面中,第一和第二面板相对于刀片固定。替代地,第一和第二面板可相对于刀片在更近侧位置与更远侧位置之间移动。在此类可移动方面中,第一和第二面板可结合夹钳在间隔开的位置与接近位置之间的枢转而可相对于刀片在更近侧位置与更远侧位置之间移动。
14.在本公开的又一方面中,刀片弯曲,且第一和第二面板类似地弯曲。
15.在本公开的再一方面中,壳体进一步支撑配置成驱动超声换能器的超声产生器。在此类方面中,壳体可进一步支撑配置成给超声产生器提供电力的电池组合件。
16.根据本公开的方面提供的一种密封和切割组织的方法包含用末端执行器夹持组织,所述末端执行器包含超声刀片、以相对于超声刀片横向间隔开的关系安置于超声刀片的相对侧上且沿着超声刀片的长度的至少一部分延伸的第一和第二面板以及夹钳。组织被夹持,使得超声刀片和夹钳限定其间的第一距离且在第一夹持力下抓握其间的组织的中心部分,且使得夹钳以及第一和第二面板中的每一个限定其间的大于第一距离的第二距离且在小于第一夹持压力的第二夹持压力下抓握其间的组织的外部侧向部分。在其它方面中,第二距离可大体上等于第一距离或小于第一距离,使得第二夹持压力大体上等于或大于第一夹持压力。
17.方法进一步包含启动超声刀片以将组织的中心部分加热到第一温度且切割组织的中心部分,且将组织的外部侧向部分加热到小于第一温度的第二温度且密封组织的外部侧向部分。
18.在本公开的方面中,夹持组织包含将第一压缩施加于组织的中心部分和将小于第一压缩的第二压缩施加于组织的外部侧向部分。
19.在本公开的另一方面中,夹持组织包含相对于超声刀片以及第一和第二面板将夹
钳从间隔开的位置移动到接近位置。在各方面中,将夹钳从间隔开的位置移动到接近位置可实现第一和第二面板从更近侧位置到更远侧位置的部署。
20.在本公开的又一方面中,组织的中心部分夹持于超声刀片与夹钳的夹钳衬里之间,且其中组织的外部侧向部分夹持于夹钳的结构主体与第一和第二面板之间。
21.在本公开的再一方面中,启动超声刀片包含驱动超声换能器以将超声能量沿着波导传输到超声刀片。
22.根据本公开的方面,还提供一种超声手术系统,其包含超声产生器、壳体、由壳体支撑的超声换能器、耦合到超声换能器的波导、限定其远侧末端部分处的刀片的波导和以相对于刀片横向间隔开的关系安置于刀片的相对侧上的第一和第二面板。超声产生器电耦合到超声换能器以用于将超声驱动信号传输到超声换能器从而驱动超声换能器以将超声能量沿着波导传输到刀片。超声产生器还电耦合到刀片以及第一和第二面板以用于在刀片、第一和第二面板以及组织之间传输询问信号。
23.在本公开的方面中,询问信号是射频(rf)信号。在此类方面中,刀片可配置成限定第一电势且第一和第二面板可配置成限定第二不同电势以用于在其间并通过组织传输rf信号。
24.在本公开的另一方面中,超声产生器配置成交替地或同时传输超声驱动信号和询问信号。
25.在本公开的另一方面中,超声驱动信号包含ac波形。替代或另外地,询问信号包含至少一个脉冲。
26.在本公开的再一方面中,超声产生器配置成基于询问信号而确定组织阻抗。
27.在本公开的又一方面中,超声手术系统进一步包含夹钳,所述夹钳可相对于刀片以及第一和第二面板在间隔开的位置与接近位置之间枢转。
28.在本公开的又另一方面,壳体进一步支撑超声产生器。在此类方面中,壳体还可支撑配置成给超声产生器提供电力的电池组合件。
29.根据本公开的方面提供的一种治疗组织的方法包含将超声驱动信号从超声产生器传输到超声换能器以驱动器超声换能器从而将超声能量沿着波导传输到刀片。方法进一步包含将询问信号从超声产生器传输到刀片,通过组织,到以相对于刀片横向间隔开的关系安置于刀片的相对侧上的第一和第二面板,且回到超声产生器以确定组织的至少一个参数。
30.在本公开的方面中,传输询问信号包含限定刀片处的第一电势和限定第一和第二面板处的第二不同电势以在其间并通过组织传输rf信号。
31.在本公开的另一方面中,传输超声驱动信号包含传输ac波形,和/或传输询问信号包含传输至少一个脉冲。
32.在本公开的又一方面中,方法进一步包含在传输询问信号之前停止超声驱动信号的传输和在传输询问信号之后恢复超声驱动信号的传输。
33.在本公开的再一方面中,超声产生器配置成交替地传输超声驱动信号和询问信号。
34.在本公开的另一方面中,确定组织的至少一个参数包含确定组织阻抗。
35.在本公开的另一方面中,方法进一步包含响应于确定组织的至少一个参数而提供
至少一个输出。
36.在本公开的又另一方面中,方法进一步包含响应于确定组织的至少一个参数而修改超声驱动信号。
37.根据本公开提供且配置成与本文中详述的器械或系统中的任一个或其它合适的器械或系统一起使用的一种手术末端执行器组合件包含:超声刀片,其适于连接到超声换能器,所述超声换能器配置成将超声能量传输到超声刀片;第一和第二面板,其以相对于超声刀片横向间隔开的关系安置于超声刀片的相对侧上;和夹钳,其可相对于超声刀片以及第一和第二面板在打开与夹持位置之间枢转。超声刀片、第一和第二面板或夹钳中的至少两个可激励到不同电势以用于在其间并通过组织传输电(例如,射频(rf)或直流电(dc))信号以用于询问组织或治疗组织中的至少一个。
38.在本公开的方面中,超声刀片配置成激励到第一电势且第一和第二面板配置成激励到第二不同电势以用于在其间并通过组织传输电信号。
39.在本公开的另一方面中,夹钳配置成激励到第一电势且第一和第二面板配置成激励到第二不同电势以用于在其间并通过组织传输电信号。
40.在又一方面,夹钳包含限定第一和第二表面的结构主体和安置于第一表面与第二表面之间的夹钳衬里。在此类方面中,第一和第二表面可激励以用于传输电信号。
41.在本公开的再一方面中,夹钳包含支撑第一和第二导电板的结构主体和安置于第一导电板与第二导电板之间的夹钳衬里。在此类方面中,第一和第二导电板可激励以用于传输电信号。
42.在本公开的又另一方面中,绝缘涂层安置于超声刀片的外部横向侧或第一和第二面板的内部横向侧中的至少一个上。
43.在本公开的另一方面中,在超声刀片的外部横向侧与第一和第二面板的内部横向侧之间维持间隙距离。
44.在本公开的再一方面中,第一和第二面板中的每一个包含竖直主体和从竖直主体横向地延伸的搁架。搁架限定在夹钳的夹持位置中与夹钳相对定位的相对表面。
45.在本公开的又一方面中,第一和第二面板中的每一个从其下部部分在近侧到远侧方向上在高度上逐渐减小以在近侧到远侧方向上逐渐暴露刀片的底部部分。
46.根据本公开提供且配置成与本文中详述的器械或系统中的任一个或其它合适的器械或系统一起使用的另一种手术末端执行器组合件包含:超声刀片,其适于连接到超声换能器,所述超声换能器配置成将超声能量传输到超声刀片;第一和第二面板,其以相对于超声刀片横向间隔开的关系安置于超声刀片的相对侧上;和夹钳,其可相对于超声刀片以及第一和第二面板在打开与夹持位置之间枢转。夹钳包含结构主体、由结构主体支撑且与超声刀片在夹钳的夹持位置中相对定位的夹钳衬里和在夹钳衬里的两侧上由结构主体支撑且分别与第一和第二面板在夹钳的夹持位置中相对定位的第一和第二能量元件。第一和第二能量元件分别配置成有助于另一能量递送到安置于第一和第二能量元件与第一和第二面板之间的组织。另一能量可不同于超声能量。
47.在本公开的方面中,第一和第二能量元件分别是光学发射器,所述光学发射器配置成通过安置于第一和第二能量元件与第一和第二面板之间的组织发射光能。在此类方面中,第一和第二面板可配置为光学吸收器或光学反射器。
48.在本公开的另一方面中,第一和第二能量元件分别是超声换能器,所述超声换能器配置成通过安置于第一和第二能量元件与第一和第二面板之间的组织发射超声波能量。在此类方面中,第一和第二面板可配置为超声吸收器或超声反射器。
49.在本公开的又一方面中,第一和第二能量元件分别是热加热器,所述热加热器配置成将热能传导到安置于第一和第二能量元件与第一和第二面板之间的组织。
50.在本公开的再一方面中,另一能量用于治疗组织和/或询问组织。
附图说明
51.当结合随附图式考虑时,根据以下详细描述,本公开的以上和其它方面和特征将变得更显而易见,其中相同的参考标号标识相似或相同的元件。
52.图1a是根据本公开提供的超声手术器械的侧面透视图;
53.图1b是包含另一超声手术器械的根据本公开提供的超声手术系统的透视图;
54.图2是图1a的超声手术器械的近侧部分的放大、侧面、纵向的横截面图;
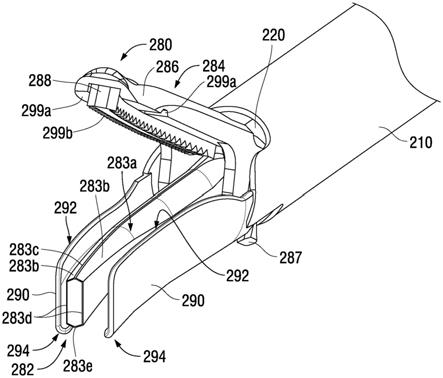
55.图3是示出其末端执行器组合件的图1a的超声手术器械的远侧部分的放大透视图;
56.图4是图1a的超声手术器械的远侧部分的放大侧视图;
57.图5是在使用密封和切割组织中的图1a的超声手术器械的末端执行器组合件的示意性说明;
58.图6是在使用询问组织中的图1a的超声手术器械的末端执行器组合件和产生器的示意性说明;
59.图7a到7d是根据本公开的方面的表示随时间而变的产生器信号的图形说明;
60.图8是配置成用于施加超声和射频(rf)能量的根据本公开的另一末端执行器组合件的示意性说明;
61.图9是配置成用于施加超声和rf能量的根据本公开的再一末端执行器组合件的示意性说明;
62.图10是配置成用于施加超声和rf能量的根据本公开的又一末端执行器组合件的示意性说明;
63.图11a和11b是配置成用于施加超声和rf能量的根据本公开的又另一末端执行器组合件的示意性说明;
64.图12是示出配置成与配置成用于施加超声和rf能量的手术器械或系统一起使用的根据本公开的管组布置的横向横截面图;
65.图13a和13b是配置成用于施加超声和光能的根据本公开的其它末端执行器组合件的示意性说明;
66.图14是配置成用于施加超声(ultrasonic/ultrasound)能量的根据本公开的另一末端执行器组合件的示意性说明;
67.图15是配置成用于施加超声和热能的根据本公开的又一末端执行器组合件的示意性说明;
68.图16a是配置成与超声手术器械或系统一起使用的另一末端执行器组合件的侧视图;
69.图16b是图16a的末端执行器组合件的前透视图;
70.图17a、17b和17c是配置成与机器人手术一起使用的末端执行器组合件的侧视、前透视和横向的横截面图;和
71.图18a、18b和18c是配置成与机器人手术系统一起使用的另一末端执行器组合件的侧视、前透视和横向的横截面图。
具体实施方式
72.参考图1a和2,根据本公开提供的超声手术器械10包含手柄组合件100和从手柄组合件100远侧地延伸的细长组合件200。手柄组合件100包含限定主体部分112和固定手柄部分114的壳体110。手柄组合件100进一步包含启动按钮120和夹持触发器130。
73.壳体110的主体部分112配置成支撑包含产生器310和超声换能器320的超声换能器和产生器组合件(“tag”)300。tag 300可与壳体110的主体部分112永久地接合或可从其拆除。产生器310包含配置成容纳产生器310的内部电子件的壳体312和配置成可旋转地支撑超声换能器320的底座314。
74.继续参考图1a和2,超声换能器320包含压电叠堆322、变幅杆324、外壳326和螺钉328,所述螺钉将压电叠堆322紧固在变幅杆324与近侧螺母(图中未示)之间。超声换能器320进一步包含旋钮329(图1)。外壳326和旋钮329彼此接合且协作以形成罩壳以包封近侧螺母、压电叠堆322和变幅杆324的一部分,其中变幅杆324的其余部分从外壳326远侧地延伸。旋钮329可从手柄组合件100的外部接入,且配置成用于手动旋转以使超声换能器320相对于产生器310和壳体110旋转。
75.分别与产生器310和超声换能器320相关联的一组连接件330和对应旋转触点334使得超声驱动信号从产生器310传送到超声换能器320的压电叠堆322以驱动超声换能器320,而不管超声换能器320相对于产生器310的旋转定向。变幅杆324继而配置成将由压电叠堆322产生的超声能量传输到细长组合件200的波导230以用于沿其传输到细长组合件200的末端执行器280的刀片282,如下详述。
76.仍参考图1a和图2,壳体110的固定手柄部分114限定配置成收纳电池组合件400的隔室116和配置成封闭隔室116的门118。电连接组合件140安置在手柄组合件100的壳体110内,且当tag 300支撑在壳体110的主体部分112上或所述主体部分内且电池组合件400安置在壳体110的固定手柄部分114的隔室116内时,所述电连接组合件用以将启动按钮120、tag 300的产生器310和电池组合件400彼此电耦合,从而能够响应于按下启动按钮120而启动超声手术器械10。在实施例中,启动按钮120可包含多个致动级,或多个启动按钮可被提供以能够在low功率模式或high功率模式中启动。在其中产生器310远离超声手术器械10的实施例中,不需要提供电池组合件400和用于接纳电池组合件400的固定手柄部分114的配置,这是由于产生器310可由标准壁式插座或其它电源供电。
77.参考图1b,根据本公开的方面提供的手术系统展示为通常由参考标号1010标识,包含手术器械1100和手术产生器1200。手术系统1010通常不同于手术器械10(图1a),其中手术系统1010包含手术器械1100和借助于缆线和插塞组合件1190连接的远端安置的手术产生器1200,而非提供机载产生器,例如tag 300的产生器310(图1a),和电源,例如电池组合件400(图1a)。手术产生器1200适于连接到电源(图中未示),例如标准壁式插座。由于手
术系统1010可以其它方式类似于手术器械10(图1a),所以下文仅详细描述其间的差异,而概括地描述或完全省略相似之处。此外,除非明确地矛盾,否则应理解,参考手术器械10(图1a)形成的本公开的方面和特征可类似地应用于手术系统1010。
78.手术系统1010的手术产生器1200包含超声插塞端口1230和射频(rf)插塞端口1240。手术产生器1200配置成在超声操作模式中产生超声驱动信号以通过超声插塞端口1230输出到手术器械1100以启动手术器械1100且在rf操作模式中提供rf能量以通过rf插塞端口1240输出到手术器械1100以启动手术器械1100,例如,以用于治疗组织和/或感测组织和/或手术器械1100的一个或多个参数。还设想可利用配置成充当超声插塞端口1230和rf插塞端口1240两者的共用端口(图中未示)。
79.手术器械1010包含手柄组合件1110、从手柄组合件1110远侧地延伸的细长组合件1150以及缆线和插塞组合件1190,所述缆线和插塞组合件可操作地与手柄组合件1110耦合且从其延伸以用于连接到手术产生器1200。细长组合件1150类似于下文详述的细长组合件200(图1a),且可包含其特征中的任一个。手柄组合件1110类似于如上文详述的手柄组合件100(图1a),不同之处在于手柄壳体1112的主体部分仅配置成支撑超声换能器1140,而非接纳tag 300(图1a)。超声换能器1140可永久地与壳体1112的主体部分接合或可从其拆除。超声换能器1140包含压电叠堆或例如经由第一电引线1197中的一个或多个电耦合到手术产生器1200的其它合适的超声换能器组件,以使得超声驱动信号能够传送到超声换能器1140以驱动超声换能器1140从而产生超声振动能量,所述超声振动能量沿着波导传输到刀片以用于用其治疗组织。
80.手柄组合件1100的启动按钮1120例如经由第一电引线1197中的一个或多个耦合到超声换能器1140和/或手术产生器1200或耦合在所述超声换能器与所述手术产生器之间,以能够响应于按下启动按钮1120而启动超声换能器1140。在实施例中,启动按钮1120可以是on/off开关。在其它实施例中,启动按钮1120可包含多个致动级以能够从off位置启动到对应于不同模式的不同致动位置,例如,对应于第一模式的第一致动位置和对应于第二模式的第二致动位置。在又其它实施例中,可提供单独启动按钮,例如,用于启动第一模式的第一致动按钮和用于启动第二模式的第二启动按钮。
81.继续参考图1b,手术器械1100的缆线和插塞组合件1190包含缆线1192、超声插塞1194和rf插塞1196。超声插塞1194配置成用于与手术产生器1200的超声插塞端口1230连接,而rf插塞1196配置成用于与手术产生器1200的电手术插塞端口1240连接。在其中产生器1200包含共用端口的实施例中,插塞组合件1190可包含配置成充当超声插塞1194和rf插塞1196两者的共用插塞(图中未示)。电耦合到超声插塞1194的多个第一电引线1197延伸穿过缆线1192且到手柄组合件1110中以用于电连接到超声换能器1140和/或启动按钮1120,以使得在超声操作模式中启动启动按钮1120后,超声驱动信号能够从手术产生器1200选择性供应到超声换能器1140。此外,多个第二电引线1199电耦合到rf插塞1196且延伸穿过缆线1192到手柄组合件1110中。一个或多个第二电引线1199电耦合到启动按钮1120,以使得在rf操作模式中能够选择性供应来自手术产生器1200的rf能量,如下详述。
82.参考图1a、2、3和4,超声手术器械10的细长组合件200包含外部驱动器套管210、安置于外部驱动套管210内的内部支撑套管220、延伸穿过内部支撑套管220的波导230、驱动组合件250、旋钮270和末端执行器280,所述末端执行器包含刀片282、夹钳284和一对面板
290。外部驱动套管210的近侧部分经由驱动组合件250可操作地耦合到手柄组合件100的夹持触发器130,而外部驱动套管210的远侧部分可操作地耦合到夹钳284。因此,夹持触发器130可选择性地致动,以由此将外部驱动套管210绕内部支撑套管220移动到使夹钳284相对于末端执行器280的刀片282从间隔开的位置枢转到接近位置,以用于将组织夹持在夹钳284与刀片282之间。驱动组合件250可提供力限制特征,由此将施加到夹持在夹钳284与刀片282之间的组织的夹持压力限制为特定夹持压力或限制在特定夹持压力范围内。旋钮270可在任一方向上旋转,以使细长组合件200相对于手柄组合件100在任一方向上旋转。
83.如上文所提及,波导230延伸穿过内部支撑套管220。波导230限定主体232和从主体232的远侧末端延伸的刀片282。波导230(包含刀片282)可由钛、钛合金或其它合适材料形成。刀片282充当末端执行器280的刀片且可与波导230一体地形成或分别形成和随后附接(永久地或可拆卸地)到波导230。波导230进一步包含配置成用于螺纹接合在变幅杆324的带螺纹凹形接收器349内的近侧带螺纹凸形连接件236,使得由超声换能器320产生的超声运动沿着波导230传输到刀片282,以用于治疗夹持在刀片282与夹钳284之间或位于刀片282附近的组织。
84.特别参看图3和4,末端执行器280的刀片282限定弯曲配置,但也考虑笔直配置。刀片282可在任何方向上相对于夹钳284弯曲,例如,使得刀片282的远侧尖端朝向夹钳284、远离夹钳284或横向地(在任一方向上)相对于夹钳284弯曲。此外,刀片282可形成以包含类似方向上的多个曲线、单个平面内的不同方向上的多个曲线和/或不同平面中的不同方向上的多个曲线。刀片282可另外或替代地形成以包含锥形配置,沿着其长度、切口、凹痕、边缘、突起、笔直表面、弯曲表面、成角度的表面、宽边缘、窄边缘和/或其它特征的各种不同横截面配置。
85.在实施例中,刀片282限定大体凸面第一组织接触表面283a,例如,与夹钳284相对的表面。大体凸面第一组织接触表面283a可由在顶点283c处会聚的一对表面283b(平坦或弓形表面)限定,或可由限定顶点283c的单个弓形表面形成。刀片282可进一步限定在第一组织接触表面283a的两侧上的大体上平坦侧向表面283d(除由于刀片282自身的曲度引起的任何曲度之外),和与第一组织接触表面283a相对且相对于其类似地配置的第二组织接触表面283e,但还考虑其它配置。第一组织接触表面283a配置成接触夹持在刀片282与夹钳284之间的组织以用于例如密封和切割所夹持组织,而第二组织接触表面283e可用于例如组织解剖、背刻(back scoring)等。
86.末端执行器280的夹钳284包含更刚性结构主体286和更顺应性夹钳衬里288。结构主体286包含例如经由接纳在外部驱动套管210内所限定的孔口内来枢转地耦合到内部支撑套管220且可操作地与外部驱动套管210相关联的一对近侧凸缘287,使得外部驱动套管210绕内部支撑套管220的滑动使夹钳284相对于刀片282从间隔开的位置枢转到接近位置以夹持夹钳284的夹钳衬里288与刀片282之间的组织。
87.夹钳284的夹钳衬里288可由例如聚四氟乙烯(ptfe)的顺应性材料制造,使得准许刀片282在与夹钳衬里288接触时振动,而不破坏超声手术器械10(图1)的组件,例如夹钳284的结构主体286,且不损害夹持在夹钳284与刀片282之间的组织的固持。还考虑其它合适的材料。夹钳衬里288可整体地或以其它方式形成。
88.在实施例中,如图3和4中所示出,夹钳衬里288从结构主体286突出,使得安置于夹
钳衬里288的两侧上的结构主体286的组织接触表面299a相对于夹钳衬里288的组织接触表面299b凹进(还参见图5)。此外,夹钳衬里288限定接近或大于刀片282的宽度的宽度,以使得组织能够跨越刀片282的全宽而夹持在夹钳衬里288的组织接触表面299b与刀片282之间。
89.面板290以相对于刀片横向间隔开的关系从刀片282的两侧上的外部和内部套管210、220远侧地延伸,使得面板290与刀片282之间,例如与刀片282的侧向表面283d之间的空间形成其间的热绝缘气隙。面板290限定安置于竖直定向中的相对薄的板状配置,使得其高度尺寸相对于夹钳284在间隔开的位置与接近位置之间的运动的轴线平行延伸,且使得其宽度尺寸相对于夹钳284在间隔开的位置与接近位置之间的运动的轴线垂直延伸。以这种方式,面板290限定相对窄组织接触表面292。在实施例中,面板290朝外远离刀片282或向内朝向刀片282张开,由此面板290的张开部分限定更大表面面积的组织接触表面292。在此类实施例中,面板290的张开部分可相对于面板290的竖直主体部分大体垂直地延伸,使得组织接触表面292大体平行于结构主体286的组织接触表面299a。还考虑其它配置。
90.在实施例中,面板290定位成使得刀片282相对于面板290横向地定中心,例如,其中面板290在其两侧上与刀片282均匀间隔开。此外,在其中刀片282限定横向弯曲配置的实施例中,面板290可类似地限定类似曲度以追踪刀片282的曲度且维持其间的大体均一间距,但还考虑其它配置。替代地,面板290可定位成使得刀片282与刀片282的凹侧上的对应面板290之间的均一间隙小于刀片282与刀片282的凸侧上的对应面板290之间的均一间隙。在实施例中,突起或其它特征(图中未示)例如在节点处从面板290延伸到接触刀片282,以便维持面板290与刀片282之间的适当间距。面板290可由不锈钢或其它合适材料形成。
91.在实施例中,面板290限定等于或大于刀片282的侧向表面283d的高度但等于或小于刀片282的总高度的例如从第一组织接触表面283a的顶点283c到第二组织接触表面283e的顶点的高度。更具体地说,在实施例中,面板290相对于刀片282竖直地定位,使得面板290的组织接触表面292与刀片282的侧向表面283d的上部末端水平地对准。因此,刀片282的第一组织接触表面283a的至少一部分在面板290上方朝向夹钳284延伸。面板290的相对表面294可与刀片282的侧向表面283d的下部末端水平地对准,可与刀片282的第二组织接触表面283e的顶点水平地对准(如所示出(参见图5)),可安置于刀片282的侧向表面283d的下部末端与第二组织接触表面283e的顶点之间,或可延伸到第二组织接触表面283e的顶点之外。
92.面板290彼此间隔开大于夹钳衬里288的组织接触表面299b的宽度的距离,使得在夹钳284的接近位置中,夹钳衬里288的组织接触表面299b的部分不直接与面板290中的任一个的组织接触表面292相对(还参见图5)。然而,面板290彼此间隔开小于结构主体286的宽度的距离,使得尽管相较于夹钳衬里288的组织接触表面299b与刀片282的第一组织接触表面283a之间的距离(或最大距离),组织接触表面292与组织接触表面299a之间的距离更大,但在夹钳284的接近位置中,除了夹持刀片282的第一组织接触表面283a与夹钳衬里288的组织接触表面299b之间的组织之外,其两侧上的组织也夹持在面板290的组织接触表面292与结构主体286的组织接触表面299a之间。替代地,组织接触表面292与组织接触表面299a之间的更大距离可大体上等于或小于夹钳衬里288的组织接触表面299b与刀片282的第一组织接触表面283a之间的距离(或最大距离)。
93.继续参考图3和4,面板290可与内部支撑套管220固定地接合且从内部支撑套管220延伸,使得面板290相对于刀片282在适当位置固定(除刀片282在启动期间的超声振动以外)且沿着刀片282的长度的至少一部分延伸。在实施例中,刀片282远侧地延伸到面板290的远侧末端之外以能够使用刀片282的所暴露远侧部分以用于组织解剖或其它目的而无来自面板290的阻碍。在此类实施例中,面板290可充当抑制刀片282解剖组织过远,例如超过刀片282从面板290远侧地延伸的距离的深度停止件。
94.作为面板290相对于刀片282固定的替代方案,面板290可与外部驱动套管210固定地接合且从外部驱动套管210延伸,使得面板290可响应于外部驱动套管210的平移而例如经由朝向固定手柄部分114挤压夹持触发器130(参见图1)而在更近侧位置与更远侧位置之间移动,在所述更近侧位置中面板290并不延伸到刀片282或沿着刀片282的长度的相对更小部分延伸,在所述更远侧位置中面板290沿着刀片282的长度的整个或相对更大部分延伸。由于外部驱动套管210的平移还实现夹钳284相对于刀片282的枢转,所以更近侧位置可对应于夹钳284的间隔开的位置,而更远侧位置对应于夹钳284的接近位置。
95.在实施例中,面板290分别与例如安置于外部套管210与内部套管220之间的第三套管(图中未示)接合,以使得面板290能够在更近侧位置与更远侧位置之间移动。这可独立于夹钳284的枢转而例如经由安置于手柄组合件100(图1)上的单独致动器(图中未示)或与其协作来实现,例如其中第三套管耦合到夹持触发器130(图1)。在其中第三套管耦合到夹持触发器130(图1)的实施例中,这可经由mueller的美国专利第9,375,205号中详述的微分部署机制中的一个或其它合适的机制来实现,以使得外部驱动套管220和面板290能够响应于夹持触发器130(图1)的致动而移动不同距离,所述美国专利的全部内容特此以引用的方式并入本文中。
96.大体参照图1到4,在使用中,超声器械10被推进到手术部位并进行操控,例如,经由旋钮329和/或旋钮270的旋转来旋转末端执行器280,使得末端执行器280定位成将有待治疗的组织安置在夹钳284与刀片282之间,其中夹钳284安置在间隔开的位置(图1)中。其后,夹持触发器130朝向壳体110的固定手柄部分114从未致动位置挤压到致动位置以绕内部支撑套管220和相对于末端执行器280平移外部驱动套管210,由此使夹钳284相对于刀片282从间隔开的位置朝向接近位置枢转以将组织夹持在夹钳284与刀片282之间(和面板290与夹钳284之间)。面板290可有助于夹持、保持和操控组织“t”且通过提供夹持的额外表面面积来抑制其滑动。
97.转向图5,用末端执行器280抓取的组织“t”可通常表征为包含三个部分:组织“t1”的中心部分和组织“t2”的安置于组织“t1”的中心部分的两侧上的一对外部侧向部分。组织“t1”的中心部分夹持在刀片282的第一组织接触表面283a与夹钳284的夹钳衬里288的组织接触表面299b之间,其中顶点283c有助于将相对较高压缩施加于组织“t1”的中心部分上,且刀片282的第一组织接触表面283a和夹钳衬里288的组织接触表面299b相对更靠近在一起的配置在组织“t1”的中心部分上提供相对较高夹持力。另一方面,组织“t2”的外部侧向部分夹持在夹钳284的结构主体286的组织接触表面299a与面板290的组织接触表面292之间。由于面板的组织接触表面292的相对平坦配置以及组织接触表面299a和组织接触表面292相对更远地相隔的配置,所以施加到组织“t2”的外部侧向部分的压缩和夹持力相对较低。当然,由于组织“t”是连续团块,所以组织的部分还在部分“t1”与“t2”之间延伸。作为以
上内容的替代方案,组织“t2”的外部侧向部分可相较于施加到组织“t1”的中心部分的夹持力以相对较高夹持力夹持。
98.在以上文详述的方式夹持组织的情况下,刀片282可例如经由按下启动按钮120(图1)来启动。还参看图1和2,在按下启动按钮120后,dc功率信号从电池组合件400供应到产生器310,所述产生器将dc功率信号转换成高电压ac波形超声驱动信号,所述高电压ac波形超声驱动信号传输到超声换能器320的压电叠堆324。以这种方式启动压电叠堆324产生超声能量,所述超声能量沿着波导230传输到超声变幅杆326且到刀片282,使得刀片282受超声振动。刀片282处提供的超声能量用于加热邻近组织“t”以密封和切割组织“t”。更具体地说,在启动期间,由于组织“t1”的中心部分与刀片282的直接接触和组织“t1”的中心部分上的相对较高压缩和夹持力,组织“t1”的中心部分被加热到相对较高温度且进行解剖,例如切割,由此将组织“t2”的外部侧向部分彼此分离。虽然可实现组织“t1”的中心部分的一些密封,但组织“t1”的中心部分上的大部分组织效果是切割。
99.同样在启动期间,刀片282处提供的超声能量加热组织“t2”的外部侧向部分。然而,鉴于组织“t2”的外部侧向部分从刀片282横向地位移,所以这是间接加热。这与组织“t2”的外部侧向部分上的相对较低压缩和夹持力耦合而引起将组织“t2”的外部侧向部分加热到相对较低温度且密封组织“t2”的外部侧向部分。虽然可实现组织“t2”的外部侧向部分的一些切割,但组织“t2”的外部侧向部分上的大部分组织效果是密封。以上内容的结果是在两个横向地间隔开的位置中,例如在两个部分“t2”处密封组织“t”,且在其间,例如在部分“t1”处切割所述组织。在实施例中,面板290还可帮助限制超出其横向地热扩散。
100.转向图6,结合图1a到3,刀片282、夹钳284的结构主体286和/或面板290可另外或替代地用于询问组织“t”,例如以获得与其相关的反馈数据以用于超声器械10的基于反馈的控制。此外,刀片282、夹钳284的结构主体286和/或面板290可另外或替代地用于建立双极rf电路以用于将rf能量传导通过组织“t”以结合施加到其的超声能量或与施加到其的超声能量分开地治疗组织“t”。
101.为启用组织询问和/或组织治疗,刀片282可经由第一电路径316电耦合到产生器310,所述第一电路径可例如借助于连接件330、旋转触点334、变幅杆324和波导230(参见图2)或其它合适的连接和/或组件在产生器310与刀片282之间延伸。面板290经由连接或分开的电路径318a、318b电耦合到产生器310。电路径318a、318b可包含将面板290与产生器310连接的超声器械10的引线、触点和/或导电组件。举例来说,引线和/或外部驱动套管210或内部支撑套管220的部分可在面板290与安置于手柄组合件100的壳体110的主体部分112内的相关联触点(未明确地标识)之间电连接,由此在tag 300与壳体110的主体部分112接合(参见图1a和2)后,相关联触点配置成与tag 300的对应触点(未明确地标识)配合。在其中产生器1200例如借助于缆线和插塞组合件1190远端地安置和耦合到超声手术器械1010的配置中,引线1199穿过缆线和插塞组合件1190延伸到产生器1200以将面板290与产生器1200(参见图1b)连接。另外或替代地,夹钳284的结构主体286可连同面板290例如经由电路径318a和/或318b或连同刀片282例如经由电路径316电耦合到产生器310。
102.继续参考图6,为了询问组织“t”,产生器310配置成经由电路径316将询问信号“is”传输到刀片282。询问信号“is”可以是例如在第一电势,例如正电势(+)下的射频(rf)信号。询问信号“is”可包含一个脉冲或多个脉冲。产生器310还建立面板290处的第二不同
电势,例如负电势(
‑
),使得询问信号“is”由于其间的电势差而从刀片282传输通过组织“t”到面板290。信号经由电路径318a、318b返回到产生器310,因此允许产生器310评估所返回信号。在其它实施例中,面板290可限定不同电势(其中刀片282不形成询问电路的部分)以使得询问信号“is”能够从一个面板290传输通过组织且到另一面板290,而非面板290限定相同电势且刀片282限定不同电势。此外,如上文所提及,夹钳284的结构主体286可电耦合到产生器310且可限定与面板290或刀片282相同的电势,例如以使得询问信号“is”能够在面板290与结构主体286和刀片282两者之间,或刀片282与结构主体286和面板290两者之间传输。替代地,夹钳284的结构主体286可替换电路中的面板290或刀片282,例如以使得询问信号“is”能够在面板290与结构主体286之间或刀片282与结构主体286之间传输。
103.产生器310配置成评估所返回信号,例如其电压、电流、电阻等,且基于其,确定组织“t”的一个或多个参数。举例来说,产生器310可配置成确定组织“t”的阻抗,所述阻抗指示组织“t”是否充分密封。因此,询问信号“is”可用于确定组织“t”是否充分密封。如果确定组织“t”充分密封,那么产生器310可配置成产生可听音、视觉指示符、触觉反馈和/或其它输出以向外科医生指示组织“t”已充分密封。另外或替代地,充分密封的组织的确定可用作反馈回路的部分,以例如通过增加功率来例如修改从产生器310输出的超声驱动信号,以有助于切割密封的组织。其它组织参数可另外或替代地用于确定是否密封组织和/或用于其它目的。举例来说,面板290中的一个或两个在其上的一个或多个位置处的例如使用热电偶的温度测量可被采用且反馈回到产生器310。
104.继续参考图6,如上文所提及,刀片282、夹钳284的结构主体286和/或面板290可另外或替代地用于用额外形式的能量(除超声能量以外)治疗组织。更具体地说,刀片282、夹钳284的结构主体286和/或面板290可建立双极rf电路以将rf能量传导通过组织“t”以结合施加到其的超声能量或与施加到其的超声能量分开地治疗组织“t”。也就是说,而非如上文所详述供应通过组织“t”的询问信号“is”或除了如上文所详述供应通过组织“t”的询问信号“is”之外,可供应组织治疗能量“tt”。举例来说,双极rf组织治疗电流“tt”可传导通过组织(使用本文中详述的电配置中的任一个)。也就是说,为了治疗组织“t”,产生器310可配置成经由电路径316用在第一电势,例如正电势(+)下的rf能量激励刀片282,且经由电路径318a、318b用在第二不同电势,例如负电势(
‑
)下的rf能量激励面板290,使得在刀片282与面板290之间建立电势梯度以使得能量,例如双极rf组织治疗电流“tt”能够传导通过安置于其间的组织以治疗安置于其间的组织。此外,如上文所提及,夹钳284的结构主体286可电耦合到产生器310且可限定与面板290或刀片282相同的电势,例如以使得双极rf组织治疗电流“tt”能够在面板290与结构主体286和刀片282两者之间传导以治疗其间的组织,或在刀片282与结构主体286和面板290两者之间传导以治疗其间的组织。替代地,夹钳284的结构主体286可替换电路中的面板290或刀片282,例如以使得双极rf组织治疗电流“tt”能够在面板290与结构主体286之间传导以治疗其间的组织或在刀片282与结构主体286之间传导以治疗其间的组织。
105.虽然上文利用rf能量详述示范性询问信号“is”和组织治疗能量“tt”,但还设想可利用能量的其它形式,例如:微波能量、热能、光能(如红外能量)、超声能量、低频率或直流电电能等。在下文关于图8到19c详述有助于这些能量中的一个或多个的施加以用于结合超声组织治疗来询问和/或治疗组织的各种配置。
106.转向图7a到7d,将超声驱动信号供应到组织以治疗组织、将询问信号供应到组织以感测一个或多个参数和/或将能量供应到组织以治疗组织的随时间而变的各种能量递送配置被示出为图形表示。
107.参考图7a,结合图2、5和6,在使用中,如上文所提及,产生器310输出高电压ac波形超声驱动信号“uds”以驱动超声换能器320的压电叠堆324,使得超声能量沿着波导230传输到超声变幅杆326且到刀片282以治疗,例如密封和/或切割组织。产生器310可进一步配置成停止超声驱动信号“uds”的输出,输出询问信号“is”(其一个或多个脉冲),且其后,恢复超声驱动信号“uds”的输出。可停止超声驱动信号“uds”,且在固定或可变间隔下周期性地输出询问信号“is”。举例来说,当开始启动时,可提供更少停止和询问信号“is”,且随着启动时间增加可提供更多停止和询问信号“is”。在实施例中,询问信号“is”可与超声驱动信号“uds”并行地、周期性地、连续地或以任何其它合适的方式输出,而非停止超声驱动信号“uds”的输出。
108.以其输出询问信号“is”的频率可另外或替代地取决于操作模式和/或其它因素。举例来说,可在high功率操作模式中较频繁地,例如在较短间隔下和在low功率操作模式中较不频繁地,例如在较长间隔下提供询问信号“is”。作为另一实例,以其输出询问信号“is”的频率可取决于所确定的组织参数,例如,当组织阻抗指示接近充分密封的情况时,可较频繁地输出询问信号“is”。每一询问信号“is”中的脉冲的数目还可与询问信号“is”的频率类似地或以任何其它合适的方式固定或可变。
109.参考图7b,作为停止超声驱动信号“uds”的输出以输出询问信号“is”且其后恢复超声驱动信号“uds”的输出的替代方案,可连续地供应超声驱动信号“uds”,同时在固定或可变间隔下周期性地输出询问信号“is”,使得在供应询问信号“is”时,同时供应超声驱动信号“uds”和询问信号“is”两者。询问信号“is”可以其它方式与上文详述的类似。
110.参考图7c,相对于供应超声驱动信号“uds”例如以驱动超声换能器320的压电叠堆324使得超声能量沿着波导230传输到超声变幅杆326且到刀片282以治疗组织(参见图3和5)以及供应其它能量,例如在刀片282、面板290和/或结构主体286之间传导双极rf组织治疗电流“tt”以治疗组织,可同时或以至少部分地重叠的时间关系供应超声驱动信号“uds”和组织治疗能量“tt”。递送到组织的同时超声和rf(或其它额外能量)可用于密封组织和/或实现其它组织效果。
111.参考图7d,相对于供应超声驱动信号“uds”以及供应其它能量,例如在刀片282、面板290和/或结构主体286之间传导双极rf组织治疗电流“tt”以治疗组织,超声驱动信号“uds”和组织治疗能量“tt”可在组织密封周期“sp”期间在第一电平下与超声驱动信号“uds”同时供应。在密封组织后,在预定时间之后,在接收用户发起的信号后,或基于其它信号和/或反馈,开始组织切割周期“cp”,其中组织治疗能量“tt”停止且超声驱动信号“uds”从第一电平增加到第二电平,例如从第一振幅到第二更大振幅,以增加刀片282(图5)的速度以有助于切割密封的组织。
112.图8示出根据本公开的配置成与本文中详述的器械或系统中的任一个一起使用的另一末端执行器组合件580。除了末端执行器组合件580并不包含面板之外,末端执行器组合件580类似于末端执行器组合件280(图3到5)。
113.相对于使用末端执行器组合件580供应超声能量,超声能量传输到刀片582以用于
治疗夹持在刀片582与夹钳584的夹钳衬里588之间或定位于刀片582附近的组织。
114.为了供应用于询问组织的其它能量,例如rf能量,产生器(图中未示)配置成经由第一电路径将询问信号,例如在正电势(+)下的rf信号传输到刀片582,以建立夹钳584的第二不同电势结构主体586,例如负电势(
‑
),使得询问信号由于其间的电势差而从刀片582传输通过组织到夹钳584的结构主体586且经由第二不同电路径返回到产生器,因此允许产生器评估所返回信号。
115.相对于供应用于治疗组织的其它能量,例如rf能量,产生器(图中未示)配置成经由第一电路径将刀片582激励到第一电势,例如正电势(+)下的rf能量,且经由第二不同电路径将夹钳584的结构主体586激励到第二不同电势,例如负电势(
‑
)下的rf能量,以使得能量,例如双极rf组织治疗电流能够传导通过安置于其间的组织以治疗安置于其间的组织。
116.参考图9,另一末端执行器组合件680根据本公开而提供且配置成与本文中详述的器械或系统中的任一个一起使用。末端执行器组合件680类似于末端执行器组合件280(图3到5),且因此下文仅详细描述其间的差异。
117.末端执行器组合件680包含刀片682、夹钳684以及安置于刀片682的两侧上的第一和第二面板690,所述夹钳包含结构主体686、夹钳衬里688以及第一和第二导电板689。结构主体686支撑夹钳衬里688的两侧上的第一和第二导电板689。第一和第二导电板689可与结构主体686电隔离或可与其电耦合(且因此彼此电耦合)。第一和第二导电板689配置成连接到产生器以能够将其激励到第一电势,例如正电势(+)下的rf能量。
118.除了提供面板290的上文详述的功能(图3到5)以外或作为提供面板290的上文详述的功能的替代方案,第一和第二面板690充当电极,所述电极配置成连接到产生器以能够将其激励到第二不同电势,例如负电势(
‑
)下的rf能量。以这种方式,rf组织治疗电流可在板689与面板690之间传导且通过安置于其间的组织以治疗,例如密封组织。与上文详述类似地,板689和面板690可另外或替代地用于询问组织以感测其一个或多个参数。
119.继续参考图9,相对于rf组织治疗或rf组织询问,刀片682可保持未激励(相对于rf能量;刀片682可用超声能量激励以超声地治疗组织)。为维持刀片682的隔离,刀片682的侧向表面683和/或面板690的面向内表面691可涂布有绝缘涂层699。绝缘涂层699可以是ptfe或其它合适的电绝缘涂层。
120.作为刀片682未用rf能量激励的替代方案,刀片682可替代地激励到与面板690或板689相同的电势。绝缘涂层699如上文所详述将刀片682与面板690隔离,同时夹钳衬里688将刀片682与板689隔离。
121.参考图10,又一末端执行器组合件780根据本公开而提供且配置成与本文中详述的器械或系统中的任一个一起使用。除了末端执行器组合件780并不包含刀片782与面板790之间的绝缘涂层之外,末端执行器组合件780类似于末端执行器组合件680(图9)。实际上,末端执行器组合件780配置成将刀片782与每一面板790之间的间隙距离“g”维持在适合间隙距离下或维持在适合间隙距离范围内以维持其间的电隔离。类似地,末端执行器组合件780配置成将面板790与每一导电板789之间的类似于或不同于间隙距离“g”的间隙距离“gg”维持在适合间隙距离下或维持在适合间隙距离范围内以维持其间的电隔离。间隙距离“g”、“gg”中的任一个或两个可以是用于密封组织的适合间隙距离,但还考虑其它间隙距离。
122.在使用中,第一和第二导电板789配置成连接到产生器以能够将其激励到第一电势,例如,正电势(+)下的rf能量,而第一和第二面板790充当电极,所述电极配置成连接到产生器以能够将所述第一和第二面板激励到第二不同电势,例如,负电势(
‑
)下的rf能量,使得rf组织治疗电流可在板789与面板790之间传导且通过安置于其间的组织以治疗,例如密封组织。与上文详述类似地,板789和面板790可另外或替代地用于询问组织以感测其一个或多个参数。
123.相对于rf组织治疗或rf组织询问,刀片782可保持未激励(相对于rf能量;刀片782可用超声能量激励以超声地治疗组织)。间隙距离“g”、“gg”维持刀片782的隔离。作为刀片782未用rf能量激励的替代方案,刀片782可替代地激励到与面板790或板789相同的电势,其中间隙距离“g”、“gg”将刀片782与其隔离。
124.图11a示出根据本公开的配置成与本文中详述的器械或系统中的任一个一起使用的再一末端执行器组合件880。除了刀片882限定圆柱形配置和/或代替面板,提供圆柱形杆890之外,末端执行器组合件880类似于末端执行器组合件780(图10)。在一些配置中,与上文相对于末端执行器组合件680(图9)所详述类似地,绝缘涂层设置于刀片882与杆890之间。
125.图11b示出根据本公开的配置成与本文中详述的器械或系统中的任一个一起使用的又另一末端执行器组合件980。除了面板990限定从其竖直主体994垂直地和朝外延伸的搁架992之外,末端执行器组合件980类似于末端执行器组合件780(图10)。因此,搁架992限定在夹钳984的闭合位置中在夹钳984的结构主体986的相对表面的大体平行定向上(例如,在约15度内)延伸的表面993。代替限定相对表面的结构主体986,夹钳984可与上文所详述类似地包含导电板。
126.转向图12,结合图2到5,在实施例中,将产生器与面板290和将产生器与夹钳284连接的电路径(结构主体和/或其导电板)可至少部分地由引线形成。替代地,可利用结构组件。举例来说,外部管210可限定将产生器与面板290连接的电路径的至少一部分,同时内部管220限定将产生器与夹钳284连接的电路径的至少一部分。在此类配置中,提供第一和第二绝缘体212、222以使波导230、内部管220和外部管210彼此电隔离。绝缘体212、222可配置为护套、间隔开的环或呈任何其它合适的方式以便维持电隔离。波导230、绝缘体212、222、内部管220和外部管210可相对于彼此同心地安置。
127.参考图13a,另一末端执行器组合件1380根据本公开而提供且配置成与本文中详述的器械或系统中的任一个一起使用。末端执行器组合件1380包含刀片1382、夹钳1384以及安置于刀片1382的两侧上且配置为光学元件1391的第一和第二面板1390,所述夹钳包含结构主体1386、夹钳衬里1388以及第一和第二光学元件1389。结构主体1386支撑夹钳衬里1388的两侧上的第一和第二光学元件1389。第一和第二光学元件1389可类似或不同,且可配置为光学发射器、光学吸收器或光学反射器。类似地,面板1390的光学元件1391类似或不同且可配置为光学发射器、光学吸收器或光学反射器,使得每一对相对光学元件1389、1391包含一个光学发射器和一个光学吸收器或光学反射器。
128.配置为光学发射器的光学元件1389、1391配置成发射光能且将光能引导通过安置于光学元件1389、1391之间的组织。配置为光学吸收器或光学反射器的光学元件1389、1391分别配置成吸收已传递通过组织的光能或将已传递通过组织的光能反射回到组织中。这一
传递通过组织的光能可用于治疗,例如密封组织和/或询问组织。光能可包含红外光、紫外光、可见光、激光或任何其它合适的光或其组合。
129.图13b示出根据本公开提供且配置成与本文中所详述的器械或系统中的任一个一起使用的另一末端执行器组合件1480。末端执行器组合件1480包含刀片1482和夹钳1484,所述夹钳包含结构主体1486、对所使用光波长透明的夹钳衬里1488(由例如ptfe形成,所述ptfe在紫外[uv]波长下大体上透明(但还考虑其它材料和对应光学透明波长)以及安装在结构主体1486上或所述结构主体内的第一和第二光学元件1489。更具体地说,第一和第二光学元件1486定向成发射通过透明夹钳衬里1488和通过安置于夹钳1484与刀片1482之间的组织的光能。在实施例中,刀片1482可充当光学吸收器或反射器,且可包含涂层或其它合适的特征以增强其吸收或反射。
[0130]
第一和第二光学元件1489可定向成在相对于刀片1482的外部表面的大体垂直方向上朝向刀片1482引导光能。更具体地说,在某些方面,刀片1482可限定具有第一和第二光学元件1489的圆柱形配置,所述第一和第二光学元件定向成在与刀片1482的中心相交的方向上引导光能,如图13b中所展示。
[0131]
参考图14,另一末端执行器组合件1580根据本公开而提供且配置成与本文中详述的器械或系统中的任一个一起使用。末端执行器组合件1580包含刀片1582、夹钳1584以及安置于刀片1582的两侧上且配置为超声吸收器或反射器1591的第一和第二面板1590,所述夹钳包含结构主体1586、夹钳衬里1588以及第一和第二超声换能器1589。结构主体1586支撑夹钳衬里1588的两侧上的超声换能器1589。第一和第二超声换能器1589配置成产生和发射朝向面板1590并通过安置于夹钳1584与面板1590之间的组织的超声波,例如以治疗组织,对组织进行成像,和/或询问组织。超声吸收器或反射器1591配置成吸收或反射已传递通过组织的超声波。替代地,这种配置可在任一或两个侧面上颠倒,例如其中一个或两个超声换能器1589安置于对应面板1590上,且其中吸收器或反射器1591安置于结构主体1586的对应侧上。
[0132]
转向图15,再一末端执行器组合件1680根据本公开而提供且配置成与本文中详述的器械或系统中的任一个一起使用。末端执行器组合件1680包含刀片1682、夹钳1684以及安置于刀片1682的两侧上的第一和第二面板1690,所述夹钳包含结构主体1686、夹钳衬里1688以及第一和第二加热元件1689。在一些配置中,面板1690还可包含加热元件。第一和第二加热元件1689可包含配置成响应于加热线圈的激励而产生热能的加热线圈。这种热能(和来自面板1690的热能,当配置成包含加热元件时)传输到安置于夹钳1684与面板1690之间的组织,例如以治疗组织。
[0133]
图16a和16b示出类似于末端执行器组合件280(图3到5)的可包含其特征和/或本文中详述的任何其它末端执行器组合件的特征中的任一个的另一末端执行器组合件1780。末端执行器组合件1780在面板的配置中不同于末端执行器组合件280(图3到5),且因此下文中仅详述那些差异。
[0134]
末端执行器组合件1780包含面板构件1790,所述面板构件具有在底部和横向侧上包围刀片1782的一部分的基底1795以及从刀片1782的任一横向侧上的基底1795远侧地延伸的第一和第二面板1796。
[0135]
基底1795限定u形配置且以固定或可移动关系从外部和/或内部套管1710、1720远
侧地延伸。更具体地说,基底1795延伸小于刀片1782的操作长度的约50%(限定为与处于闭合位置的夹钳1784的夹钳衬里1788相对的刀片1782的部分)、小于刀片1782的操作长度的约40%或小于刀片1782的操作长度的约30%。因此,刀片1782的底部部分沿着其操作长度的远侧50%、60%或70%暴露。
[0136]
面板1796从刀片1782的两侧上的基底1795远侧地延伸。面板1796可包含从其竖直主体1794的上部末端垂直地和朝外延伸的搁架1792。面板1796可进一步包含从其下部末端的锥形,由此面板1796的高度从其近侧末端朝向其远侧末端渐减地逐渐减小。因此,刀片1782的底部部分和横向侧在近侧到远侧方向上越来越暴露。这种配置有助于刀片1782的远侧底部部分的使用,例如以用于肠切开术、背刻(backscoring)和/或其它手术任务,同时仍提供如相对于以上配置中的任一个所详述的面板的功能性。
[0137]
大体上参看图17a到18c(且还适用于图6到16),相较于用于手持型手动操控和操作的手柄组合件100(图1a),本文中所公开的各种实施例还可配置成与机器人手术系统和统称为“遥控手术”的东西一起工作。此类系统采用各种机器人元件来辅助外科医生且允许手术器械的远程操作(或部分远程操作)。出于这种目的可采用各种机器人臂、齿轮、凸轮、滑轮、电马达以及机械马达等且可将其设计成具有机器人手术系统以在操作或治疗的过程期间辅助外科医生。此类机器人系统可包含可远程导向系统、自动柔性手术系统、远程柔性手术系统、远程铰接手术系统、无线手术系统、模块化或可选择性配置的远程操作手术系统等。
[0138]
机器人手术系统可用于紧接于手术室或定位于远程位置中的一个或多个控制台。在这个例子中,一个团体的外科医生或护士可使患者对手术作好准备,且用本文中所公开的器械中的一个或多个配置机器人手术系统,而另一外科医生(或一组外科医生)经由机器人手术系统远程控制器械。如可理解,高度熟练的外科医生可在多个位置执行多个操作而不离开他/她的远程控制台,这在经济上有利且对于患者或一系列患者也是有益的。
[0139]
手术系统的机器人臂通常通过控制器耦合到一对主手柄。手柄可通过外科医生移动以产生任何类型的手术器械(例如,末端执行器、抓钳、小刀、剪刀等)的工作端的对应移动,这可对本文所描述的实施例中的一个或多个的使用进行补充。主手柄的移动可缩放,使得工作端的对应移动不同于、小于或大于由外科医生的操作手所执行的移动。比例因子或齿轮比率(gearing ratio)可以是可调整的,使得操作者可控制手术器械的工作端的分辨率。
[0140]
主手柄可包含各种传感器,以向外科医生提供与各种组织参数或条件有关的反馈,例如,由于操控、切割或以其它方式治疗导致的组织阻力,器械对组织的压力,组织温度,组织阻抗等。如可了解,此类传感器为外科医生提供模拟实际操作条件的增强触觉反馈。主手柄还可包含多种不同致动器,其用于精细组织操控或治疗,从而进一步增强外科医生模仿实际操作条件的能力。
[0141]
特别参看图17a到17c,展示用于与机器人手术系统一起使用的末端执行器组合件1880,但末端执行器组合件1880可替代地用于手持器械,和/或本文中所详述的其它末端执行器组合件中的任一个可与机器人手术系统一起使用。末端执行器组合件1880在机器人轴杆组合件1881b的更多铰接接头1881a中的一个远侧地定位且包含支撑其中或其上的超声换能器1881d的近侧壳体1881c。波导(未明确展示)从超声换能器1881d远侧地延伸且包含
限定在其远侧末端处的刀片1882。夹钳1884枢转地安装到壳体1881c以使得夹钳1884能够相对于刀片1882在打开位置与夹持位置之间枢转以用于夹持夹钳1884与刀片1882之间的组织。刀片1882限定圆柱形配置,但还考虑其它配置。在一些配置中,夹钳1884能够绕刀片1882旋转。
[0142]
夹钳1884包含结构主体1886和夹钳衬里1888。结构主体1886自身或安装在其上的导电板(图中未示)可配置成连接到产生器以充当rf(或基于其它能量的)电路的一个电极(或部分)。刀片1882配置成连接到产生器以充当rf(或基于其它能量的)电路的另一电极(或部分)。结构主体1886的相对表面1887(或导电板的相对表面,如果提供)是倒圆角的以补充刀片1882的圆柱形配置,使得相对表面1887与组织抓取于其间的刀片1882之间的间隙距离在沿其的任一点处大体上(例如,在约15%内)均一。rf信号可在结构主体1886与刀片1882之间传达以与上文所详述类似地询问和/或治疗组织。还考虑其它合适的能量配置,如上文所详述的配置。
[0143]
参考图18a到18c,展示用于与机器人手术系统一起使用的另一末端执行器组合件1980,但末端执行器组合件1880可替代地用于手持器械。末端执行器组合件1980类似于末端执行器组合件1880(图17a到17c)且可包含末端执行器组合件1880(图17a到17c)或本文中详述的任何其它末端执行器组合件的特征中的任一个。
[0144]
末端执行器组合件1980在机器人轴杆组合件1981b的更多铰接接头1981a中的一个远侧地定位且包含支撑其中的超声换能器1981d的近侧壳体1981c。波导(未明确展示)从超声换能器1981d远侧地延伸且包含限定在其远侧末端处的刀片1982。夹钳1984枢转地安装到壳体1981c以使得夹钳1984能够相对于刀片1982在打开位置与夹持位置之间枢转以用于夹持夹钳1984与刀片1982之间的组织。
[0145]
末端执行器组合件1980不同于末端执行器组合件1880(图17a到17c),其中末端执行器组合件1980进一步包含面板构件1990,所述面板构件具有在底部和横向侧上包围刀片1982的一部分的基底1995以及从刀片1982的任一横向侧上的基底1995远侧地延伸的第一和第二锥形面板1996。面板构件1990可类似于且包含末端执行器组合件1780(参见图16a和16b)的面板构件1790的特征中的任一个。
[0146]
虽然已经在上文详述且在图式中展示本公开的若干实施例,但并不希望将本公开限制于此,而希望本公开的范围如本领域所允许的一样宽泛,且以同样的方式理解说明书。
[0147]
因此,以上描述和随附图式不应解释为限制性的,而仅仅是作为特定实施例的例证。所属领域的技术人员将设想在本文所附的权利要求书的范围和精神内的其它修改。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1