泵和可释放地联接的泵致动器的制作方法
1.本技术要求2019年3月29日提交的名称为“泵和可释放地联接的泵致动器(pump and releasably coupled pump actuator)”的美国临时专利申请号62/826,309的优先权,该专利申请出于所有目的以引用方式并入本文。技术领域
[0002][0003]
所附权利要求书中阐述的本发明整体涉及组织治疗系统,并且更具体地但非限制地涉及用于对敷料施加负压的负压源以及使用负压源以进行负压治疗的方法。
背景技术:
[0004]
临床研究和实践已表明,减小靠近组织部位的压力可增强并加速组织部位处的新组织的生长。该现象的应用众多,但已证明其对于治疗伤口是特别有利的。无论伤口的病因如何,无论是创伤、外科手术还是另外的原因,伤口的正确护理对于结果都是重要的。通过减压来治疗伤口或其他组织通常可称为“负压治疗”,但也称作其他名称,包括例如“负压伤口治疗”、“减压治疗”、“真空治疗”、“真空辅助闭合”和“局部负压”。负压治疗可提供许多益处,包括上皮组织和皮下组织的迁移、改善的血流以及伤口部位处的组织的微变形。这些益处可一起增加肉芽组织的发育并减少愈合时间。
[0005]
虽然负压治疗的临床益处是众所周知的,但对治疗系统、部件和过程的改善可有益于医疗保健提供者和患者。
技术实现要素:
[0006]
在所附权利要求中阐述了用于在负压治疗环境中使用的负压源的新型且有用的系统、装置和方法。还提供了例示性实施方案以使得本领域的技术人员能够制造和使用要求保护的主题。
[0007]
例如,在一些实施方案中,一种用于利用负压治疗组织部位的装置可包括:室壁,该室壁限定泵室;和驱动表面,该驱动表面联接到该室壁。该装置还可包括:马达;蜗杆,该蜗杆联接到该马达;蜗轮,该蜗轮与该蜗杆接合;和圆柱形凸轮,该圆柱形凸轮包括被配置为与该驱动表面接合的工作表面。
[0008]
在一些实施方案中,该装置还可包括排气阀,该排气阀流体地联接到该泵室并且适于在该室壁被压缩的情况下允许从该泵室抽出流体。
[0009]
在一些实施方案中,该装置还可包括进气阀,该进气阀流体地联接到该泵室并且适于允许将流体抽吸到该泵室中。
[0010]
另选地,其他示例性实施方案可包括一种用于利用负压治疗组织部位的装置,该装置包括:室壁,该室壁至少部分地限定泵室;和边缘,该边缘联接到该室壁。该装置还可包括:马达;致动器臂,该致动器臂联接到该室壁;凸轮,该凸轮联接到该马达并且被配置为致动该致动器臂;和框架,该框架联接到该边缘并且与该致动器臂联接。
[0011]
其他示例性实施方案可包括一种用于利用负压治疗组织部位的装置,该装置包括:泵;和泵致动器,该泵致动器被配置为致动该泵。该泵可包括室壁,该室壁包括驱动表面和柔性壁,其中该室壁限定泵室。该泵致动器可包括:马达;蜗杆,该蜗杆联接到该马达;蜗轮,该蜗轮与该蜗杆接合;和圆柱形凸轮,该圆柱形凸轮包括被配置为接合到该驱动表面的工作表面。
[0012]
其他示例性实施方案可包括一种用于利用负压治疗组织部位的装置,该装置包括:泵;和泵致动器,该泵致动器被配置为致动该泵。该泵可包括室组件,该室组件具有:室壁,该室壁限定泵室;凸台,该凸台从该室壁向上延伸;内附接唇缘,该内附接唇缘从该凸台延伸;边缘,该边缘围绕该室壁的周边延伸;和外附接唇缘,该外附接唇缘从该边缘向内延伸。该泵致动器可包括:框架,该框架联接到该边缘;致动器臂,该致动器臂联接到该凸台并且与该框架联接;马达;和凸轮,该凸轮联接到该马达并且被配置为致动该致动器臂。
[0013]
在一些实施方案中,该泵致动器可与该泵可释放地联接。
[0014]
通过结合例示性实施方案的以下详细描述参考附图,可以最好地理解制造和使用受权利要求保护的主题的目标、优点和优选模式。
附图说明
[0015]
图1是根据本说明书的可提供负压治疗的治疗系统的示例性实施方案的功能框图;
[0016]
图2是可与图1的治疗系统的一些实施方案相关联的负压源的分解图;
[0017]
图3是图2所示的负压源的截面图;
[0018]
图4是可与图1的治疗系统的一些实施方案相关联的负压源的另一个示例的分解图;
[0019]
图5是可与图1的治疗系统的一些示例性实施方案相关联的负压源的另一个示例的等轴视图;
[0020]
图6是图5所示的负压源的等轴视图;
[0021]
图7是图5所示的负压源的截面图;
[0022]
图8是图5所示的负压源的截面图;
[0023]
图9是可与图1的治疗系统的一些实施方案相关联的负压源的另一个示例的分解图;
[0024]
图10是可与图1的治疗系统的一些实施方案相关联的负压源的另一个示例的分解图;
[0025]
图11是可与图1的治疗系统的一些实施方案相关联的负压源的另一个示例的分解图;
[0026]
图12是可与负压源的一些实施方案相关联的泵的示例的分解图;
[0027]
图13是图12所示的泵的组装图;
[0028]
图14是图13所示的泵的截面图;
[0029]
图15是可与图1的治疗系统的一些实施方案相关联的负压源的另一个示例的等轴视图;
[0030]
图16是图15所示的负压源的截面图;
[0031]
图17是可与负压源的一些实施方案相关联的泵的另一个示例的截面图;
[0032]
图18是可与负压源的一些实施方案相关联的泵的另一个示例的截面图;
[0033]
图19是可与负压源的一些实施方案相关联的泵的另一个示例的分解图;
[0034]
图20是图19所示的泵的截面图;
[0035]
图21是可与图1的治疗系统的一些实施方案相关联的负压源的另一个示例的分解图;
[0036]
图22是图21的已组装负压源的顶视图;
[0037]
图23是图22所示的负压源的截面图;
[0038]
图24是可与图1的治疗系统的一些实施方案相关联的负压源的另一个示例的分解图;
[0039]
图25是图24的负压源的组装图;
[0040]
图26是图25所示的负压源的截面图;
[0041]
图27是可与负压源的一些实施方案相关联的泵致动器的示例的分解图;
[0042]
图28是可与图1的治疗系统的一些实施方案相关联的图27的泵致动器与负压源的示例的等轴视图;
[0043]
图29是图28所示的负压源的截面图;
[0044]
图30是图28所示的负压源的顶视图;
[0045]
图31是图30所示的负压源的截面图;
[0046]
图32是可与图1的治疗系统的一些实施方案相关联的敷料的示例的等轴视图;
[0047]
图33是图32所示的敷料的截面图;以及
[0048]
图34是可与图1的治疗系统的一些实施方案相关联的敷料的另一个示例的等轴视图。
具体实施方案
[0049]
对示例性实施方案的以下描述提供了使得本领域技术人员能够制造和使用所附权利要求中阐述的主题的信息,但可省略本领域中已熟知的某些细节。因此,以下具体实施方式应视为示例性的而非限制性的。
[0050]
本文还可参考各种元件之间的空间关系或附图中描绘的各种元件的空间取向来描述示例性实施方案。一般来讲,此类关系或取向假设在待接受治疗的位置中与患者一致或相对于患者的参照系。然而,如本领域的技术人员应当认识到的,该参照系仅为描述性便利的而非严格的规定。
[0051]
图1是根据本说明书的可提供组织部位负压治疗的治疗系统100的示例性实施方案的简化功能框图。
[0052]
在此上下文中,术语“组织部位”广义地指位于组织上或组织内的伤口、缺损或其他治疗靶标,包括但不限于骨组织、脂肪组织、肌肉组织、神经组织、真皮组织、血管组织、结缔组织、软骨、肌腱或韧带。伤口可包括例如慢性伤口、急性伤口、创伤伤口、亚急性伤口和开裂伤口、部分皮层烧伤、溃疡(诸如糖尿病性溃疡、压迫性溃疡或静脉功能不全溃疡)、皮瓣和移植物。术语“组织部位”还可指任何组织的区域,其不一定受伤或有缺陷,而是其中可能期望添加或促进附加组织生长的区域。例如,可向组织部位施加负压以使附加组织生长,
进而可收获和移植该附加组织。
[0053]
治疗系统100可包括负压源或负压供应装置诸如负压源105,以及一个或多个分配部件。分配部件优选地为可拆卸的,并且可为一次性的、可重复使用的或可再循环的。敷料(诸如敷料110)是可与治疗系统100的一些示例相关联的分配部件的示例。如图1的示例所示,在一些实施方案中,敷料110可包括组织界面115、覆盖件120或两者或者基本上由组织界面、覆盖件或两者组成。
[0054]
治疗系统100还可包括调节器或控制器,诸如控制器125。另外,治疗系统100可包括传感器以测量操作参数并向控制器125提供指示操作参数的反馈信号。如图1所示,例如,治疗系统100可包括联接到控制器125的第一传感器130和第二传感器135。
[0055]
治疗系统100的一些部件可容纳在其他部件内或与其他部件结合使用,诸如传感器、处理单元、警报指示器、存储器、数据库、软件、显示设备或进一步促进治疗的用户界面。例如,在一些实施方案中,负压源105可与控制器125和其他部件组合成治疗单元。
[0056]
一般来讲,治疗系统100的部件可直接或间接地联接。例如,负压源105可直接联接到敷料110。联接可包括流体联接、机械联接、热联接、电联接或化学联接(诸如化学键),或在一些情况下包括联接的一些组合。例如,负压源105可电联接到控制器125,并且可流体地联接到一个或多个分配部件以提供到组织部位的流体路径。在一些实施方案中,部件也可借助于物理接近、与单个结构成一整体、或由同一块材料形成而被联接。
[0057]
例如,负压供应装置诸如负压源105可为处于负压的空气的贮存器,或者可为手动或电动设备,诸如真空泵、抽吸泵、在许多医疗保健机构处可用的壁抽吸端口或微型泵。“负压”通常是指小于局部环境压力的压力,诸如密封治疗环境外部的局部环境中的环境压力。在许多情况下,局部环境压力也可以是组织部位所处于的大气压力。另选地,压力可小于与组织部位处的组织相关联的液体静压。除非另外指明,本文所述的压力值为表压。对负压增加的提及通常是指绝对压力降低,而负压降低通常是指绝对压力增加。虽然由负压源105提供的负压的量和性质可根据治疗要求而变化,但压力通常为介于
‑
5mm hg(
‑
667pa)和
‑
500mm hg(
‑
66.7kpa)之间的低真空(通常也称为粗真空)。常见的治疗范围介于
‑
50mm hg(
‑
6.7kpa)和
‑
300mm hg(
‑
39.9kpa)之间。
[0058]
控制器诸如控制器125可以是被编程为操作治疗系统100的一个或多个部件诸如负压源105的微处理器或计算机。在一些实施方案中,例如,控制器125可以是通常包括集成电路的微控制器,该集成电路包括被编程为直接或间接地控制治疗系统100的一个或多个操作参数的处理器内核和存储器。操作参数可包括例如施加到负压源105的功率、由负压源105生成的压力、或分配到组织界面115的压力。控制器125还优选地被配置为接收一个或多个输入信号诸如反馈信号,并且被编程为基于输入信号来修改一个或多个操作参数。
[0059]
传感器诸如第一传感器130和第二传感器135在本领域中通常已知为能够操作以检测或测量物理现象或特性的任何装置,并且通常提供指示被检测或测量的现象或特性的信号。例如,第一传感器130和第二传感器135可被配置为测量治疗系统100的一个或多个操作参数。在一些实施方案中,第一传感器130可为换能器,该换能器被配置为测量气动通路中的压力并且将测量值转换为指示所测量的压力的信号。在一些实施方案中,例如,第一传感器130可为压阻式应变仪。在一些实施方案中,第二传感器135可任选地测量负压源105的操作参数,诸如电压或电流。优选地,来自第一传感器130和第二传感器135的信号适合作为
控制器125的输入信号,但在一些实施方案中,一定的信号调节可能是适当的。例如,在信号可由控制器125处理之前,可能需要对信号进行滤波或放大。通常,信号是电信号,但可能以其他形式表示,诸如光信号。
[0060]
组织界面115通常可适于部分地或完全地接触组织部位。组织界面115可采用多种形式并且可具有多种尺寸、形状或厚度,这取决于各种因素,诸如所实施的治疗的类型或组织部位的性质和尺寸。例如,组织界面115的尺寸和形状可适于较深和不规则形状的组织部位的轮廓。组织界面115的任何表面或所有表面可具有不平的、粗糙的或锯齿状的外形。
[0061]
在一些实施方案中,组织界面115可包括歧管或基本上由其组成。在该上下文中,歧管可包括用于在压力下在组织界面115上收集或分配流体的装置或基本上由其组成。例如,歧管可适于从源接收负压并且通过多个开孔在组织界面115上分配负压,这可具有在组织部位上收集流体并且朝向源抽出流体的效果。在一些实施方案中,流体路径可被反转或者可提供辅助流体路径以有利于在组织部位上递送流体。
[0062]
在一些例示性实施方案中,歧管可包括多个通路,该多个通路可互连以改善流体的分配或收集。在一些例示性实施方案中,歧管可包括具有互连的流体通路的多孔材料或基本上由其组成。可适于形成互连流体通路(例如,通道)的合适多孔材料的示例可包括蜂窝泡沫,包括开孔泡沫诸如网状泡沫;多孔组织收集;以及通常包括孔隙、边缘和/或壁的其他多孔材料,诸如纱布或毡垫。液体、凝胶和其他泡沫也可包括或被固化以包括开孔和流体通路。在一些实施方案中,歧管可附加地或另选地包括形成互连流体通路的突出部。例如,歧管可被模制以提供限定互连流体通路的表面突出部。
[0063]
在一些实施方案中,组织界面115可包含网状泡沫或基本上由其组成,该网状泡沫具有可根据规定治疗的需要而变化的孔径和自由体积。例如,自由体积为至少90%的网状泡沫可适用于许多治疗应用,平均孔径在400微米至600微米(40个孔/英寸至50个孔/英寸)范围内的泡沫可特别适用于一些类型的治疗。组织界面115的拉伸强度也可根据规定治疗的需要而变化。组织界面115的25%压缩载荷挠曲可为至少0.35磅/平方英寸,并且65%压缩载荷挠曲可为至少0.43磅/平方英寸。在一些实施方案中,组织界面115的拉伸强度可为至少10磅/平方英寸。组织界面115可具有至少2.5磅/英寸的抗撕强度。在一些实施方案中,组织界面115可为由多元醇(诸如聚酯或聚醚)、异氰酸酯(诸如甲苯二异氰酸酯)以及聚合改性剂(诸如胺和锡化合物)组成的泡沫。在一些示例中,组织界面115可为网状聚氨酯泡沫,诸如存在于granufoam
tm
敷料或v.a.c.veraflo
tm
敷料中的网状聚氨酯泡沫,两者均可购自德克萨斯州圣安东尼奥的kinetic concepts公司。
[0064]
组织界面115的厚度也可根据规定治疗的需要而变化。例如,可减小组织界面的厚度以减小外围组织上的张力。组织界面115的厚度还可影响组织界面115的适形能力。在一些实施方案中,在约5毫米至约10毫米的范围内的厚度可以是合适的。
[0065]
组织界面115可为疏水性的或亲水性的。在组织界面115可为亲水性的示例中,组织界面115还可从组织部位芯吸走流体,同时继续将负压分配到组织部位。组织界面115的芯吸特性可通过毛细流动或其他芯吸机制从组织部位抽吸走流体。可能合适的亲水性材料的示例是聚乙烯醇开孔泡沫,诸如可购自德克萨斯州圣安东尼奥的kinetic concepts公司的whitefoam
tm
敷料。其他亲水性泡沫可包括由聚醚制成的那些。可表现出亲水特性的其他泡沫包括已被处理或涂覆以提供亲水性的疏水性泡沫。
[0066]
在一些实施方案中,组织界面115可由生物可吸收材料构造。合适的生物可吸收材料可包括但不限于聚乳酸(pla)和聚乙醇酸(pga)的聚合物共混物。该聚合物共混物还可包括但不限于聚碳酸酯、聚富马酸酯和己内酯。组织界面115还可用作新细胞生长的支架,或者支架材料可与组织界面115结合使用以促进细胞生长。支架通常是用于增强或促进细胞的生长或组织的形成的物质或结构,诸如为细胞生长提供模板的三维多孔结构。支架材料的例示性示例包括磷酸钙、胶原、pla/pga、珊瑚羟基磷灰石、碳酸盐或经加工的同种异体移植物材料。
[0067]
在一些实施方案中,覆盖件120可提供细菌屏障和免受物理创伤的保护。覆盖件120还可由可减小蒸发损失并在两个部件或两个环境之间(诸如在治疗环境和局部外部环境之间)提供流体密封的材料构造。覆盖件120可包括例如弹性体膜或薄膜或由弹性体膜或薄膜组成,该弹性体膜或薄膜可提供足以针对给定负压源在组织部位处保持负压的密封。在一些应用中,覆盖件120可具有高湿气透过率(mvtr)。例如,在一些实施方案中,mvtr可为至少250克/平方米/24小时(g/m2/24hours),该值根据astm e96/e96m正杯法在38℃和10%相对湿度(rh)下使用竖立杯技术测得。在一些实施方案中,最高至5000g/m2/24小时的mvtr可提供有效透气性和机械性能。
[0068]
在一些示例性实施方案中,覆盖件120可为水蒸气可透过但液体不可透过的聚合物消毒盖布,诸如聚氨酯膜。此类消毒盖布通常具有在25微米至50微米范围内的厚度。针对可透过材料,渗透性通常应足够低以使得可保持所期望的负压。覆盖件120可包括例如以下材料中的一种或多种:聚氨酯(pu),诸如亲水性聚氨酯;纤维素;亲水性聚酰胺;聚乙烯醇;聚乙烯吡咯烷酮;亲水性丙烯酸类树脂;有机硅,诸如亲水性有机硅弹性体;天然橡胶;聚异戊二烯;苯乙烯
‑
丁二烯橡胶;氯丁二烯橡胶;聚丁二烯;丁腈橡胶;丁基橡胶;乙丙橡胶;乙烯丙烯二烯单体;氯磺化聚乙烯;聚硫橡胶;乙烯
‑
乙酸乙烯酯(eva);共聚酯;以及聚醚嵌段聚酰胺共聚物。此类材料可商购获得,例如:可从明尼苏达州明尼阿波利斯的3m公司(3m company,minneapolis minnesota)商购获得的消毒盖布;可从加利福尼亚州帕萨迪纳的avery dennison公司(avery dennison corporation,pasadena,california)商购获得的聚氨酯(pu)消毒盖布;可例如从法国科隆布的arkema s.a.公司(arkema s.a.,colombes,france)获得的聚醚嵌段聚酰胺共聚物(pebax);以及可从英国雷克瑟姆的expopack advanced公司(expopack advanced coatings,wrexham,united kingdom)商购获得的inspire 2301和inpsire 2327聚氨酯膜。在一些实施方案中,覆盖件120可包括具有2600g/m2/24小时的mvtr(正杯技术)和约30微米的厚度的inspire 2301。
[0069]
附接设备可用于将覆盖件120附接到附接表面,诸如未损伤的表皮、衬垫或另一个覆盖件。附接设备可采用多种形式。例如,附接设备可为被构造成将覆盖件120粘结到组织部位周围的表皮的医学上可接受的压敏粘合剂。在一些实施方案中,例如,覆盖件120中的一些或全部可涂覆有涂层重量可在约25克/平方米至65克/平方米(g.s.m.)之间的粘合剂,诸如丙烯酸粘合剂。在一些实施方案中,可施加较厚粘合剂或粘合剂的组合以改善密封并减少渗漏。附接设备的其他示例性实施方案可包括双面胶带、糊剂、水性胶体、水凝胶、硅树脂凝胶或有机凝胶。
[0070]
在操作中,可将组织界面115放置在组织部位内、组织部位上方、组织部位上、或以其他方式接近组织部位放置。例如,如果组织部位为伤口,则组织界面115可部分地或完全
地填充伤口,或者其可放置在伤口上方。可将覆盖件120放置在组织界面115上方并且密封到组织部位附近的附接表面。例如,可将覆盖件120密封到组织部位周边的未受损表皮。因此,敷料110可提供靠近组织部位、基本上与外部环境隔离的密封治疗环境,并且负压源105可减小密封治疗环境中的压力。
[0071]
使用负压源来减小另一个部件或位置中(诸如在密封的治疗环境内)的压力的流体力学在数学上可以是复杂的。然而,适用于负压治疗的流体力学的基本原理通常是本领域技术人员熟知的,并且减小压力的过程可在本文中例示性地描述为例如“递送”、“分配”或“生成”负压。
[0072]
一般来讲,渗出物和其他流体沿流体路径朝较低压力流动。因此,术语“下游”通常意味着流体路径中的相对更靠近负压源或更远离正压源的某物。相反,术语“上游”意味着相对更远离负压源或更靠近正压源的某物。类似地,可以方便地根据这种参照系中的流体“入口”或“出口”来描述某些特征部。通常出于描述本文的各种特征部和部件的目的假设该取向。然而,在一些应用中,流体路径也可反转,诸如通过用正压源代替负压源,并且该描述约定不应理解为限制性约定。
[0073]
通过密封治疗环境中的组织界面115在组织部位上施加的负压可在组织部位中引起宏应变和微应变。负压还可从组织部位移除渗出物和其他流体,这些渗出物和其他流体可收集在容器(未示出)中。
[0074]
在一些实施方案中,控制器125可从一个或多个传感器诸如第一传感器130接收并处理数据。控制器125还可控制治疗系统100的一个或多个部件的操作,以管理递送到组织界面115的压力。在一些实施方案中,控制器125可包括用于接收期望目标压力的输入,并且可被编程以用于处理与待向组织界面115施加的目标压力的设定和输入相关的数据。在一些示例性实施方案中,目标压力可为固定压力值,其由操作者设定为组织部位处的治疗所期望的目标负压,然后作为输入提供给控制器125。目标压力可基于形成组织部位的组织的类型、损伤或伤口(如果有的话)的类型、患者的医学状况和主治医师的偏好因组织部位不同而不同。在选择期望的目标压力之后,控制器125可基于目标压力以一种或多种控制模式操作负压源105,并且可从一个或多个传感器接收反馈以保持组织界面115处的目标压力。
[0075]
在一些实施方案中,控制器125可具有连续压力模式,其中操作负压源105以在治疗的持续时间内或直到手动停用时提供恒定的目标负压。除此之外或另选地,控制器可具有间歇压力模式。例如,控制器125可操作负压源105以在目标压力和大气压之间循环。例如,可将目标压力设定在
‑
135mmhg的值,持续指定时间段(例如,5分钟),之后是停用的指定时间段(例如,2分钟)。可通过激活负压源105来重复循环,负压源可在目标压力和大气压之间形成方波图案。
[0076]
在一些示例性实施方案中,负压从环境压力增加到目标压力可能不是瞬时的。例如,负压源105和敷料110可具有初始上升时间。初始上升时间可根据所使用的敷料和治疗设备的类型而变化。例如,一个治疗系统的初始上升时间可在约20mmhg/s至30mmhg/s之间的范围内,并且另一个治疗系统的初始上升时间可在约5mmhg/s至10mmhg/s之间的范围内。如果治疗系统100在间歇模式下操作,重复上升时间可为基本上等于初始上升时间的值。
[0077]
在一些示例性动态压力控制模式中,目标压力可随时间而变化。例如,目标压力可以三角形波形的形式变化,在50mmhg和135mmhg的负压之间变化,上升时间设定在+25mmhg/
min的速率处并且下降时间设定在
‑
25mmhg/min处。在治疗系统100的其他实施方案中,三角波形可以在25mmhg和135mmhg的负压之间变化,上升时间设定在+30mmhg/min的速率处并且下降时间设定在
‑
30mmhg/min处。
[0078]
在一些实施方案中,控制器125可以动态压力模式控制或确定可变目标压力,并且可变目标压力可在最大压力值和最小压力值之间变化,该最大压力值和最小压力值可被设定为由操作者规定为所需负压范围的输入。可变目标压力也可由控制器125处理和控制,控制器可根据预定波形诸如三角波形、正弦波形或锯齿波形来改变目标压力。在一些实施方案中,波形可由操作者设定为治疗所需的预定或时变的负压。
[0079]
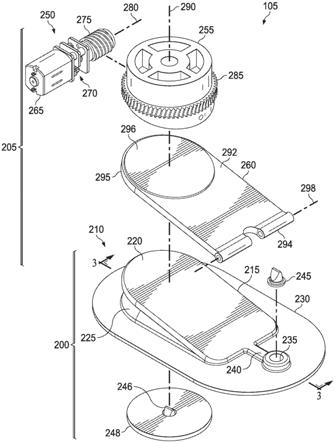
图2是示出可与治疗系统100的一些示例性实施方案相关联的负压源105的附加细节的分解图。在图2的示例性实施方案中,负压源105可包括泵200和泵致动器205。泵200可为波纹管泵。
[0080]
如图2的示例性实施方案所示,泵200可包括具有室壁215的室组件210。室壁215可包括驱动表面220和从驱动表面220向下延伸的柔性壁225。在一些实施方案中,驱动表面220可具有矩形形状,该矩形形状在第一端部处具有圆角并且在第二端部处具有半圆形。如图2所示,在一些实施方案中,柔性壁225可以是折叠的。在一些实施方案中,柔性壁225可为波纹状的。室组件210还可包括从室壁215的底部向外延伸的基部230。基部230可围绕室壁215的底部的整个周边延伸。基部230可被配置为将室组件210密封到覆盖件120(未示出)。在一些实施方案中,如图2所示,基部230可包括排气口235和排气管道240。泵200还可包括被配置为位于排气口235中的排气阀245。泵200还可包括进气阀246。在一些实施方案中,进气阀246可保持在阀保持器248中。在一些实施方案中,泵200可被手动致动。在一些实施方案中,泵200可由泵致动器205致动。
[0081]
如图2中进一步所示,泵致动器205可包括马达组件250、凸轮255和驱动板260。马达组件250可包括马达265、齿轮系270和蜗杆275。马达265可以是与电能源(诸如电池)电联接并由其供电的电动马达。在一些实施方案中,马达265可为dc马达。齿轮系270可操作地联接到马达265。齿轮系270可包括多个齿轮以增加马达265的转矩。传动轴(未示出)可从齿轮系270延伸。蜗杆275可与传动轴可操作地联接,使得马达265可使蜗杆275围绕蜗杆轴线280旋转。
[0082]
在一些实施方案中,凸轮255可包括蜗轮285。在一些实施方案中,凸轮255和蜗轮285可一体地形成。在一些实施方案中,凸轮255和蜗轮285可以是联接在一起的单独部分。凸轮255可被配置为围绕凸轮旋转轴线290旋转。蜗轮285可被配置为由蜗杆275驱动。因此,马达265的旋转致使蜗杆275围绕蜗杆轴线280旋转并且蜗杆275可与蜗轮285接合,从而致使蜗轮285围绕凸轮旋转轴线290旋转。
[0083]
在一些实施方案中,驱动板260可包括具有第一端部294和第二端部295的板292。如图2所示,第一端部294可为铰接的,并且第二端部295可为圆形的。板292可由刚性材料形成,并且可具有与室组件210的驱动表面220的形状类似的形状。滑块盘296可靠近第二端部295联接到板292。滑块盘296可为圆形形状并且可由刚性的低摩擦材料形成。凸轮255可被配置为接触滑块盘296。滑块盘296的低摩擦材料减小凸轮255上的摩擦力,从而允许凸轮255在滑块盘296上更容易地旋转。另外,第一端部294可以可旋转地联接到外壳(未示出)。驱动板260可在泵致动器205的操作期间围绕铰接轴线298旋转。如图2所示,驱动板260可位
于凸轮255和室组件210之间。
[0084]
图3是沿线3
‑
3截取的已组装的图2所示的负压源105的截面图。如图3所示,室壁215可限定泵室300。在一些实施方案中,驱动表面220和柔性壁225可限定泵室300。泵室300可被配置为与组织界面115(未示出)流体地联接。排气管道240可将泵室300流体地联接到排气口235和排气阀245。排气阀245可被配置为位于排气口235中。排气阀245可仅允许单向流体流出泵室300。在一些实施方案中,例如,排气阀245可以是鸭嘴阀。进气阀246可被配置为与泵室300流体地联接。在一些实施方案中,进气阀246可仅允许单向流体流入泵室300中。在一些实施方案中,例如,进气阀246可以是鸭嘴阀。
[0085]
在图3中,泵200被示为处于其未致动位置。在未致动位置中,驱动表面220可相对于基部230以正角α进行取向。在一些实施方案中,在未致动位置,驱动表面220可相对于基部230成约10度至约45度的范围内的角α。在一些实施方案中,在未致动位置,驱动表面220可相对于基部230成约20度至约30度的范围内的角α。在其他实施方案中,在未致动位置,驱动表面220可相对于基部230成约30度的角α。在其他实施方案中,驱动表面220可相对于基部230成约15度的角α。因此,当从侧面观察时,泵室300可具有楔形形状。
[0086]
在一些实施方案中,至少室壁215的柔性壁225可由弹性材料形成。在一些实施方案中,例如,驱动表面220、柔性壁225和基部230可全部由弹性材料形成。在一些实施方案中,驱动表面220、柔性壁225和基部230可一体地形成。在其他实施方案中,驱动表面220可比柔性壁225更具刚性。例如,驱动表面220可为基本上刚性的,使得其在泵200的操作期间不弯曲或屈服。另外如图3所示,在一些实施方案中,泵200还可包括泵室300内的板310,该板联接到驱动表面220的下侧。板310可向驱动表面220提供附加的刚度。
[0087]
另外,如图3所示,泵致动器205的凸轮255可包括工作表面315。在一些实施方案中,凸轮255可以是端凸轮或面凸轮。在一些实施方案中,工作表面315可具有楔形形状。在一些实施方案中,工作表面315可具有弯曲或弧形的表面。在一些实施方案中,如图3所示,工作表面315可被配置为接触驱动板260的滑块盘296。图3示出了处于未致动位置的凸轮255。当凸轮255处于未致动位置时,凸轮255的工作表面315可具有与室组件210的驱动表面220的正角相等的正角。换句话讲,当处于未致动位置时,工作表面315可平行于室组件210的驱动表面220。
[0088]
在一些实施方案中,工作表面315可相对于凸轮旋转轴线290成约45度至约80度的范围内的角θ。在一些实施方案中,工作表面315可相对于凸轮旋转轴线290成约60度至约70度的范围内的角θ。在其他实施方案中,例如,工作表面315可相对于凸轮旋转轴线290成约60度的角θ。在其他实施方案中,工作表面315可相对于凸轮旋转轴线290成约75度的角θ。在一些实施方案中,凸轮旋转轴线290可垂直于基部230。
[0089]
在一些实施方案中,如图3中进一步所示,凸轮255还可包括位于工作表面315的顶点处的滚柱轴承320。滚柱轴承320可进一步减小凸轮255上的摩擦力,从而允许凸轮255在滑块盘296上更容易地旋转。在一些实施方案中,滚柱轴承320可略微延伸超过凸轮255的工作表面315。
[0090]
虽然在图2或图3中未示出,但泵致动器205的部件可被包封在外壳内。外壳可以可操作地保持马达组件250、凸轮255和驱动板260。马达265可固定在外壳内。凸轮255可以可旋转地固定在外壳内,使得凸轮255可围绕凸轮旋转轴线290旋转。另外,驱动板260可以可
旋转地固定在外壳内,使得驱动板260可围绕铰接轴线298旋转。
[0091]
在操作中,当泵致动器205的马达265接收电力时,马达265使齿轮系270的齿轮旋转,由此致使传动轴使蜗杆275围绕蜗杆轴线280旋转。蜗杆275的齿与蜗轮285的齿接合并且将蜗杆275的旋转转换成蜗轮285和凸轮255的旋转,从而致使凸轮255围绕凸轮旋转轴线290旋转。凸轮255可从未致动位置和致动位置旋转360度。当凸轮255从未致动位置旋转到致动位置时,工作表面315可接合驱动板260的滑块盘296以朝向基部230将力施加在驱动板260上。驱动板260推动在室组件210的驱动表面220上,从而减少驱动表面220与基部230之间的角α。然后,驱动表面220处于致动位置。这致使泵室300被压缩并且通过排气阀245将流体从泵室300抽出。当凸轮255从致动位置旋转到未致动位置时,驱动板260上的力被移除,并且驱动表面220和基部230之间的角α增加。泵室300膨胀,从而通过进气阀246将流体拉入泵室300中并返回到未致动位置。然后,驱动表面220处于未致动位置。柔性壁225的弹性性质可向上推动在驱动表面220上,从而使驱动表面220返回到其未致动位置。在泵200被功率致动的实施方案中,柔性壁225的弹性性质可减小能量消耗。例如,可减小电池耗尽并且可减小马达尺寸。只要向马达265供电,泵送动作就会继续。泵室300的这种循环压缩和膨胀在泵室300中产生负压,其中该负压可被供应给组织界面以减少组织界面中的压力。
[0092]
图4是可与治疗系统100的一些实施方案相关联的负压源105的另一个示例的分解图。如图4所示,在一些实施方案中,进气阀246可以是平阀。进气阀246可以是圆形的,其中周边密封区域400围绕具有一个或多个阀410的中心阀区域405。周边密封区域400可被流体地密封到室组件210的基部230。在一些实施方案中,一个或多个阀410可为仅允许在泵室300的方向上的流体流的平阀。在一些示例中,进气阀246可以是平阀,诸如可购自马萨诸塞州弗雷明汉的ccl工业公司(ccl industries of framingham,massachusetts)的flexis
tm
阀。
[0093]
如图4中进一步所示,在一些实施方案中,当从顶部观察时,室组件210的驱动表面220和泵室300可具有泪滴形状。在一些实施方案中,驱动表面220的窄端部可与基部230重合,并且驱动表面220的较宽端部可与基部230间隔开非零距离。如图4所示,在一些实施方案中,凸轮255的工作表面315可被配置为直接接触和驱动室组件210的驱动表面220。
[0094]
泵致动器205可包括凸轮255、马达组件250(具有马达265、齿轮系270和蜗杆275)、电池415和印刷电路板420。在一些实施方案中,外壳430可包封凸轮255和马达组件250。电池415、印刷电路板420和马达265均可被电联接。电池415可向马达265供应电能。印刷电路板420可包括用于控制马达265的操作的各种电元件和电路。此外,泵致动器205可包括端口425,诸如微型usb端口或usb
‑
c端口,其用于向电池415和/或马达265供应电力和/或在泵致动器205与单独设备(例如,计算机、智能电话、平板电脑等)之间传输数据。泵致动器205还可包括用于接通和断开马达的开关(未示出)。泵致动器205的部件可容纳在外壳430中。
[0095]
图5是可与治疗系统100的一些示例性实施方案相关联的负压源105的另一个示例的等轴视图。如图5所示,泵致动器205的外壳430可具有大致体育场形状。
[0096]
图6是图5所示的负压源105的等轴视图。泵致动器205的外壳430在图6中未示出,使得可容易地观察到电池415、马达组件250、蜗轮285和凸轮255。在图6所示的示例性实施方案中,凸轮255和蜗轮285为联接在一起的单独部件,并且凸轮255可相对于蜗轮285线性地移动。凸轮255可包括从凸轮255向上延伸远离工作表面315的凸轮从动件600和三个保持
构件605。蜗轮285可包括凸轮从动件600和三个保持构件605可延伸通过的四个孔。凸轮从动件600可终止于半球形尖端。保持构件605可包括圆柱形杆610并且可终止于止动件615。止动件615可包括圆柱形头部,该圆柱形头部所具有的直径大于蜗轮285中的孔的直径。保持构件605的止动件615限制凸轮255向下远离蜗轮285的线性移动。示出了三个保持构件605;然而,在一些实施方案中,例如,可包括更少或更多的保持构件605。在一些实施方案中,保持构件605可包括被配置为延伸通过蜗轮285中的两个弯曲狭槽的弯曲壁。
[0097]
图7是沿线7
‑
7截取的图5所示的负压源105的截面图,示出了处于未致动位置的泵致动器205。在图7的示例性实施方案中,泵致动器205可包括轴700,蜗轮285和凸轮255被配置为围绕该轴旋转。泵致动器205的外壳430可包括位于蜗轮285上方的固定凸轮705。固定凸轮705可包括固定工作表面710。工作表面可相对于凸轮旋转轴线290成正角。例如,在一些实施方案中,固定工作表面710可相对于凸轮旋转轴线290成约45度至约80度的范围内的角β。在一些实施方案中,例如,固定工作表面710可相对于凸轮旋转轴线290成约60度至约70度的范围内的角β。在其他实施方案中,例如,固定工作表面710可相对于凸轮旋转轴线290成约60度的角β。在其他实施方案中,例如,固定工作表面710可相对于凸轮旋转轴线290成约75度的角β。在一些实施方案中,当从侧面观察时,固定凸轮705可具有楔形或锥形形状。在其他实施方案中,固定凸轮705的固定工作表面710可具有弯曲或弧形的表面。
[0098]
图8是沿线7
‑
7截取的图5所示的负压源105的截面图,示出了处于致动位置的泵致动器205。当蜗轮285旋转时,凸轮255围绕凸轮旋转轴线290旋转(如箭头a所示)并且在凸轮旋转轴线290的方向上(沿着箭头b)移动。具体地讲,蜗轮285的旋转可通过保持构件605传递到凸轮255,使得凸轮255可从未致动位置旋转到致动位置。保持构件605被配置为防止凸轮255和蜗轮285之间的相对旋转。同时,凸轮从动件600沿着固定凸轮705的固定工作表面710骑乘,并且由于固定工作表面710的角度,凸轮从动件600被向下推动。这继而向下推动凸轮255,从而向下推动室组件210的驱动表面220,进而压缩泵室300。保持构件605可有助于对准凸轮255,使得其可沿着凸轮旋转轴线290平移。另外,轴700也可有助于对准凸轮255。与保持构件605一起,轴700可在泵致动器205的操作期间减小或消除凸轮255的约束。当凸轮255旋转时,凸轮255的工作表面315还向下推动室组件210的驱动表面220,从而压缩泵室300。因此,可通过凸轮255的向下移动和凸轮255的工作表面315的旋转两者来向下推动室组件210的驱动表面220。当泵致动器205到达致动位置时,保持构件605的止动件615防止凸轮255沿着凸轮旋转轴线290进一步向下的平移。
[0099]
图9是负压源105的另一个示例的分解图。在图9的示例性实施方案中,室组件210的室壁215可包括向上延伸并且具有底端部905和顶端部910的周边壁900。驱动表面220可联接到周边壁900的顶端部910。周边壁900和驱动表面220可限定泵室300。基部230可从周边壁900的底端部905径向向外延伸。周边壁900可具有第一端部915和第二端部920,其中第二端部920短于第一端部915,使得驱动表面220被取向为相对于基部230成正角。室组件210还可包括附接设备925。在一些实施方案中,附接设备925可包括围绕周边壁900的周边延伸的脊或基本上由该脊组成。在一些实施方案中,脊可靠近周边壁900的底端部905。在一些实施方案中,脊可与周边壁900的底端部905相距约1毫米至约5毫米。在一些实施方案中,例如,脊可在第二端部920处靠近驱动表面220。另外,泵致动器205可包括配合元件935,诸如凹陷部。配合元件935可与附接设备925协作以将泵致动器205固定到室组件210。例如,泵
200上的脊可被接收在泵致动器205上的凹陷部中并由该凹陷部保持。
[0100]
图10是负压源105的另一个示例的分解图。泵200上的附接设备925可包括从基部230向上延伸的圆柱体1000,其中头部1005位于圆柱体1000的顶部处。头部1005可具有大于圆柱体1000的直径。泵致动器205上的配合元件935可包括t形狭槽1010,该t形狭槽可被配置为接收附接设备925的头部1005和圆柱体1000。t形狭槽1010的水平部分可足够宽以接收附接设备925的头部1005,而t形狭槽1010的垂直部分可比t形狭槽1010的水平部分更窄。t形狭槽1010的竖直部分足够宽以接收附接设备925的圆柱体1000。t形狭槽的宽度差在泵致动器205中形成肩部1015,当泵致动器205适当地附接到泵200时,附接设备925的头部1005的底部可接触该肩部。这种接触防止泵致动器205从泵200抬离。
[0101]
图11是负压源105的另一个示例的分解图。泵200上的附接设备925可包括基部230中的含铁金属板。泵致动器205上的配合元件935可包括磁体。泵致动器205可通过磁体的磁力保持在泵200上。在一些实施方案中,磁体可位于基部230中,并且含铁金属板可位于泵致动器205中。在一些实施方案中,泵致动器205和泵200两者可设置有磁体,其中磁体的极性可相反以便将泵致动器205吸引到泵200。磁力可防止泵致动器205从泵200抬离。
[0102]
图12是可与负压源105的一些实施方案相关联的泵200的示例的分解图。壁1200可远离室组件210的基部230延伸。如图12所示,壁1200可位于从基部230的周边向内的一定距离处。壁1200可具有内侧面1205和外侧面1210。在一些示例中,内侧面1205可以是平坦的,并且外侧面1210可以是弯曲或倒圆的。另外,如图所示,壁1200可具有两个下部分1215。
[0103]
如图12中进一步所示,附接设备925可包括框架1220。在一些实施方案中,框架1220包括基部部分1225。基部部分1225可以是矩形的。第一翼部1230可从基部部分1225向外延伸,并且第二翼部1235可与第一翼部1230相对地从基部部分1225向外延伸。第一臂1240可从第一翼部1230延伸并且第二臂1245可从第二翼部1235延伸。第一桥接件1250可从第一臂1240延伸并且第二桥接件1255可从第二臂1245延伸。拱形部1260可从第一桥接件1250延伸并且可连接到第二桥接件1255。基部部分1225、第一翼部1230、第二翼部1235、第一臂1240、第二臂1245和拱形部1260可全部位于第一平面中。第一桥接件1250和第二桥接件1255可位于第一平面上方的第二平面中。也就是说,第一桥接件1250和第二桥接件1255可在基部部分1225、第一翼部1230、第二翼部1235、第一臂1240、第二臂1245和拱形部1260上方延伸。
[0104]
如图12中进一步所示,框架1220还可包括偏置元件1265。偏置元件1265可包括相对于基部部分1225以正角向上延伸的悬臂弹簧1270。悬臂弹簧1270可包括以一定角度从基部部分1225向上延伸的拱形部1275。悬臂弹簧1270可具有与室壁215的形状相对应的形状。例如,悬臂弹簧1270可为泪滴形的。
[0105]
在一些实施方案中,框架1220可由单件金属片冲压而成。例如,框架1220可由一件金属片冲压而成,并且然后可向上折叠偏置元件1265,并且可使用一步或两步成形过程来向上推动第一桥接件1250和第二桥接件1255。在其他实施方案中,例如,框架1220可由刚性塑料形成。
[0106]
图13是图12所示的泵200的组装图。基部部分1225、第一翼部1230、第二翼部1235、第一臂1240、第二臂1245(图12中不可见)和拱形部1260可全部位于室组件210的基部230中。在一些实施方案中,室组件210的基部230可被包覆模制到框架1220上。在其他实施方案
中,例如,框架1220可被加热堆叠到室组件210的基部230。在一些实施方案中,基部部分1225、第一翼部1230、第二翼部1235、第一臂1240、第二臂1245和拱形部1260可全部位于室组件210的基部230下方。
[0107]
如图13中进一步所示,第一桥接件1250和第二桥接件1255可在室组件210的基部230上方延伸。第一桥接件1250和第二桥接件1255可另外靠近室组件210的壁1200的下部分1215定位。
[0108]
图14是沿线14
‑
14截取的图13所示的泵200的截面图。如图14所示,偏置元件1265可位于驱动表面220下方。偏置元件1265可被配置为向上偏置驱动表面220。因此,偏置元件1265可被配置为使泵室300从致动位置返回到未致动位置。因此,偏置元件1265可将泵室300偏置到膨胀状态。如图14的示例所示,偏置元件1265的角γ可等于驱动表面220的角α。
[0109]
图15是可与治疗系统100的一些实施方案相关联的负压源105的等轴视图。如图15所示,泵致动器205可包括配合元件935。当泵致动器205联接到泵200时,配合元件935可居中地位于室组件210的壁1200的下部分1215内。下部分1215可允许用户触及配合元件935。另外,壁1200的尺寸可被设计成当泵致动器205联接到泵200时允许泵致动器205驻留在壁1200的周边内。壁1200可覆盖泵致动器205的侧面的至少一部分。因此,壁1200可减小或防止底切。壁1200可防止衣服或某个其他对象在泵200和泵致动器205之间滑动并且被卡住或将泵致动器205拉离泵200。壁1200的弯曲或倒圆的外侧面1210还可致使衣服或某个其他对象在泵致动器205上方滑动。另外,壁1200可减小在衣服下方的泵致动器205的显著性。
[0110]
图16是沿线16
‑
16截取的图15所示的负压源105的截面图。如图16所示,泵致动器205的配合元件935还可包括具有齿1605的闩锁1600,该齿可被配置为闩锁到第一桥接件1250或第二桥接件1255上以将泵致动器205可释放地联接到泵200。闩锁1600可由偏置元件(未示出)偏置成处于闩锁位置。泵致动器205可在壁1200内放置在泵200上并且被向下推动,直到齿1605闩锁或卡扣到第一桥接件1250或第二桥接件1255上。配合元件935还可包括联接到闩锁1600的按钮1610。用户可按下按钮1610以将闩锁1600从第一桥接件1250或第二桥接件1255释放。在一些实施方案中,例如,泵致动器205可包括两个闩锁1600,其中每个闩锁1600闩锁到第一桥接件1250或第二桥接件1255中的一者上。闩锁1600因此用于将泵致动器205可释放地联接到泵200。框架1220可用于将泵致动器205适当地定位在泵200上。在一些实施方案中,框架1220可仅具有一个桥接件并且泵致动器205可仅具有一个闩锁1600,以确保泵致动器205可仅以一种方式联接到泵200。这可确保泵致动器205适当地联接到泵200,使得泵致动器205可致动泵200。
[0111]
图17是可与负压源105的一些实施方案相关联的泵200的另一个示例的截面图。如图17所示,在一些实施方案中,偏置元件1265可包括位于室组件210的泵室300中的平拉伸弹簧。
[0112]
图18是可与负压源105的一些实施方案相关联的泵200的另一个示例的截面图。如图18所示,在一些实施方案中,偏置元件1265可包括弹性构件,诸如可被压缩并随后膨胀以向上偏置室壁215的开孔泡沫楔形件。
[0113]
所述的偏置元件1265可减小泵致动器205的能量消耗。例如,可减小电池415的耗尽并且可减小马达265的尺寸。在一些实施方案中,偏置元件可用于压缩泵200,并且泵致动器可用于使泵200膨胀。
[0114]
在各种实施方案中,由泵200泵送的流体可不穿过泵致动器205。因此,在泵200用于向组织界面供应负压的情况下,从组织界面移除的流体可能不会穿过泵致动器205。
[0115]
图19是可与负压源105的一些实施方案相关联的泵200的另一个示例的分解图。如图19所示,泵200可以是隔膜泵。室组件210可包括室壁215、凸台1900、内附接唇缘1905、边缘1910、外附接唇缘1915和基部230。
[0116]
图20是沿线20
‑
20截取的图19所示的泵200的截面图。在图20的示例中,室组件210的室壁215限定泵室300。泵室300可流体地联接到进气阀246。如图20所示,室壁215可以是大致半球形的,并且包括可具有穹顶形状的第一部分2000和可具有u形的第二部分2005,该第二部分围绕室壁215的周边延伸。凸台1900可为圆柱形的并且可远离第一部分2000的中心延伸。凸台1900可包括肩部2010,该肩部可围绕凸台1900径向延伸,其中凸台1900与室壁215的穹顶形部分2000相交。肩部2010可向凸台1900提供结构支撑。排气管道240可延伸通过凸台1900。排气阀245可位于排气管道240中。排气阀245可仅允许单向流体流出泵室300。在一些实施方案中,例如,排气阀245可以是鸭嘴阀。室组件210还包括可从凸台1900的顶部径向向外延伸的内附接唇缘1905。另外,室组件210的边缘1910可围绕室壁215的周边延伸。在一些实施方案中,外附接唇缘1915可从边缘1910的顶部径向向内延伸。如图20所示,室壁215的第二部分2005可联接到外附接唇缘1915的底侧面。基部230可从边缘1910的底部径向向外延伸。
[0117]
在一些实施方案中,至少室壁215可由弹性材料形成。力可作用于室壁215以朝向基部230推动室壁215,由此压缩或减小泵室300的容积。在其他实施方案中,整个室组件210可由弹性材料形成。例如,室组件210可由橡胶材料模制。在各种实施方案中,室壁215、凸台1900、内附接唇缘1905、边缘1910、外附接唇缘1915和基部230可一体地形成。
[0118]
图21是可与治疗系统100的一些实施方案相关联的负压源105的另一个示例的分解图。在图21的示例性实施方案中,泵致动器205可大体包括致动器臂2100、框架2102,以及具有马达265和凸轮255的马达组件250。
[0119]
致动器臂2100包括具有第一端部2106和第二端部2108的主体2104。主体2104可以是u形的。主体2104包括基部2110以及远离基部2110延伸的第一腿部2112和第二腿部2114。基部2110、第一腿部2112和第二腿部2114可从主体2104的第一端部2106延伸到第二端部2108。致动器臂2100还可包括在主体2104的第一端部2106处的第一翼部2116和第二翼部2118。第一翼部2116可从第一腿部2112的顶部向下延伸。第二翼部2118可从第二腿部2114的顶部向下延伸。第一翼部2116和第二翼部2118中的每一者可包括狭槽2120,该狭槽可被配置为接受泵200的内附接唇缘1905并闩锁到其上。在一些实施方案中,狭槽2120可位于第一翼部2116和第二翼部2118上,使得狭槽2120的顶部与基部2110的底部处于相同平面中。在一些实施方案中,第一翼部2116和第二翼部2118中的每一者还可包括扩张端部2122,该扩张端部远离主体2104的基部2110向外扩张。致动器臂2100可被配置为联接到泵200。致动器臂2100还可包括分别位于主体2104的第一腿部2112和第二腿部2114中的第一孔2124和第二孔2126。第一孔2124和第二孔2126被配置为接收马达组件250的马达265。另外,致动器臂2100还包括从主体2104的第二端部2108延伸的联接构件2128。联接构件2128可被配置为将致动器臂2100联接到框架2102。在一些实施方案中,例如,联接构件2128可包括平行于主体2104的基部延伸的板。在一些实施方案中,板可以是矩形的并且可比基部2110更宽。
[0120]
泵致动器205的框架2102可被配置为接收致动器臂2100,使得致动器臂2100可相对于框架2102旋转。框架2102可包括第一端部2132和第二端部2134。框架2102还可包括在第二端部2134处的基部2136。基部2136可以是u形的。第一腿部2138和第二腿部2140可从基部2136朝向第一端部2132延伸。框架2102还可包括第二腿部2140中的凸轮狭槽2142,该凸轮狭槽可被配置为接收马达组件250的凸轮255。凸轮255可经由凸轮狭槽2142与致动器臂2100接合。第一腿部2138和第二腿部2140可终止于第一端部2132处。框架2102还可包括第一附接臂2144和第二附接臂2146。第一附接臂2144可在框架2102的第一端部2132处位于第一腿部2138上。第二附接臂2146可在框架2102的第一端部2132处位于第二腿部2140上。第一附接臂2144和第二附接臂2146中的每一者的至少一部分可向下延伸。如图所示,例如,第一附接臂2144和第二附接臂2146可分别从第一腿部2138和第二腿部2140垂直向下延伸。第一附接臂2144和第二附接臂2146中的每一者的底部可包括一个或多个齿2148,该一个或多个齿被配置为与泵200的外附接唇缘1915协作以将框架2102联接到泵200。另外,第一附接臂2144和第二附接臂2146中的每一者的顶部可分别包括从其向内延伸的第一引导构件2150和第二引导构件2152。如图所示,例如,第一引导构件2150和第二引导构件2152可从第一附接臂2144和第二附接臂2146垂直向内延伸。如图21中进一步所示,在一些实施方案中,第一附接臂2144和第二附接臂2146中的每一者的顶部可分别在第一腿部2138和第二腿部2140上方延伸。
[0121]
框架2102的基部2136还可包括第一保持构件2154和第二保持构件2156。第一保持构件2154和第二保持构件2156可为例如夹臂,该夹臂可被配置为保持致动器臂2100的联接构件2128。基部2136还可包括靠近第一保持构件2154和第二保持构件2156的一个或多个支起件2158。支起件2158可被配置为将联接构件2128保持在框架2102的基部2136上方。
[0122]
马达265可以是可与电能源电联接并由其供电的电动马达。在一些实施方案中,例如,马达可以是振动马达。例如,泵致动器205可包括用于向马达265供应电能的电池(未示出)。泵致动器205还可包括可与电池和马达265电联接的印刷电路板(未示出)。印刷电路板可包括用于控制马达265的操作的各种电元件和电路。泵致动器205还可包括用于接通和断开马达265的开关(未示出)。
[0123]
图22是图21的已组装负压源105的顶视图。如图22所示,致动器臂2100还可包括通过基部2110的通道2200。当泵致动器205被组装时,致动器臂2100可通过联接构件2128可旋转地联接到框架2102。联接构件2128可通过第一保持构件2154和第二保持构件2156固定到框架2102。致动器臂2100的主体2104可以能够围绕枢转轴线2202挠曲或旋转。另外,致动器臂2100的第一翼部2116和第二翼部2118可在第一引导构件2150和第二引导构件2152之间接收在框架2102中。马达265可相对于致动器臂2100可旋转地固定,使得马达265不相对于致动器臂2100旋转。另外,在马达265固定到致动器臂2100的情况下,马达组件250的凸轮255可被接收在框架2102的凸轮狭槽2142中。
[0124]
图23是沿线23
‑
23截取的图22所示的负压源105的截面图。泵致动器205可通过致动器臂2100和框架2102联接到泵200。具体地讲,致动器臂2100可通过以下方式来联接到泵200的凸台1900:将第一翼部2116和第二翼部2118的扩张端部2122向下按压到泵200的内附接唇缘1905上,从而致使第一翼部2116和第二翼部2118向外展开。然后,第一翼部2116和第二翼部2118可沿内附接唇缘1905向下滑动,直到内附接唇缘1905卡扣到第一翼部2116和第
二翼部2118中的狭槽2120中。然后,第一翼部2116和第二翼部2118可弹回并且将内附接唇缘1905保持在狭槽2120内。另外,框架2102可通过将第一附接臂2144和第二附接臂2146的齿2148接合到外附接唇缘1915上来联接到泵200。例如,第一附接臂2144和第二附接臂2146可朝彼此向内按压并且然后可向下按压,直到齿2148与外附接唇缘1915接合地对准。一旦对准,可移除按压力,并且第一附接臂2144和第二附接臂2146可远离彼此向外弹开并且与外附接唇缘1915接合。
[0125]
在泵致动器205联接到泵200的情况下并且当马达265被接通时,马达265使凸轮255在框架2102的凸轮狭槽2142内旋转。凸轮255在凸轮狭槽2142内的旋转运动导致马达265以大致上下运动的方式平移。因为马达265联接到致动器臂2100,所以马达265的平移导致致动器臂2100以大致上下运动的方式平移。致动器臂2100相对于框架2102移动。致动器臂2100的运动循环地将室壁215朝向基部230推动,从而压缩泵室300,并且然后将室壁215拉离基部230,从而使泵室300膨胀。在向下冲程中,流体通过排气阀245并通过通道2200从泵室300抽出。在向上冲程中,流体通过进气阀246被抽吸到泵室300中,并且泵室300膨胀。泵室300的这种循环压缩和膨胀在泵室300中产生负压,其中该负压可被供应给组织界面以减少组织界面中的压力。
[0126]
图24是可与治疗系统100的一些示例性实施方案相关联的负压源105的另一个示例的分解图。在图24的示例性实施方案中,泵致动器205可大体包括致动器臂2100、框架2102,以及具有马达265和凸轮255的马达组件250。
[0127]
致动器臂2100还可包括位于主体2104的第一端部2106和第二端部2108之间的第一翼部2116和第二翼部2118。如图24所示,第一翼部2116和第二翼部2118可位于第一端部2106和远侧端部2108之间的中间位置。第一翼部2116和第二翼部2118中的每一者可包括狭槽2120,该狭槽可被配置为接受泵200的内附接唇缘1905并闩锁到其上。在一些实施方案中,第一翼部2116和第二翼部2118中的每一者还可包括扩张端部2122。致动器臂2100还可包括靠近第一端部2106的分别延伸通过第一腿部2112和第二腿部2114的第一传动轴孔2400和第二传动轴孔2405。第一传动轴孔2400和第二传动轴孔2405可被配置为接收马达265的传动轴2410。另外,凸轮255可被配置为靠近第一传动轴孔2400和第二传动轴孔2405位于第一腿部2112和第二腿部2114之间。传动轴2410可延伸通过第一传动轴孔2400、凸轮255和第二传动轴孔2405。另外,图24的致动器臂2100还包括靠近主体2104的第二端部2108的在第一腿部2112和第二腿部2114之间延伸的枢轴销2415。致动器臂2100可被配置为围绕延伸通过枢轴销2415的枢转轴线2202旋转。
[0128]
泵致动器205的框架2102可被配置为接收致动器臂2100,使得致动器臂2100可相对于框架2102旋转。在图24的示例中,框架2102可包括上部主体2420。如图所示,例如,上部主体2420可具有细长八边形形状。然而,上部主体2420可具有其他形状,诸如圆形、卵形、矩形、正方形、六边形、五边形和直线形。框架2102还可包括联接到上部主体2420的凸轮接合构件2425。在图24的示例中,凸轮狭槽2142设置在凸轮接合构件2425的第一端部处,并且枢轴孔2430可设置在与第一端部相对的第二端部处。枢轴销2415可被接收在枢轴孔2430中。在一些实施方案中,枢轴销2415可旋转地固定在枢轴孔2430中。在一些实施方案中,枢轴销2415可相对于枢轴孔2430旋转。另外,凸轮255可被接收在凸轮狭槽2142中。框架2102还可包括从上部主体2420的相对侧向下延伸的第一附接臂2144和第二附接臂2146。第一附接臂
2144和第二附接臂2146中的每一者的底部可包括一个或多个齿2148,该一个或多个齿被配置为与泵200的外附接唇缘1915协作以将框架2102联接到泵200。另外,框架2102还可包括从上部主体2420向内延伸的第一引导构件2150和第二引导构件2152。第一引导构件2150和第二引导构件2152可分别靠近第一附接臂2144和第二附接臂2146定位。
[0129]
图25是图24的负压源105的组装图。当泵致动器205被组装时,致动器臂2100可通过枢轴销2415可旋转地联接到框架2102。致动器臂2100可以能够围绕枢转轴线2202旋转。另外,致动器臂2100的第一翼部2116和第二翼部2118可在第一引导构件2150和第二引导构件2152之间接收在框架2102中。马达265可以可旋转地固定到致动器臂2100,使得马达265不相对于致动器臂2100旋转。例如,在一些实施方案中,马达265可通过一个或多个螺钉固定到致动器臂2100。另外,致动器臂2100的第一翼部2116和第二翼部2118可联接到泵200的内附接唇缘1905。框架2102的第一附接臂2144和第二附接臂2146可联接到泵200的外附接唇缘1915。
[0130]
图26是沿线26
‑
26截取的图25所示的负压源105的截面图。如图26所示,凸轮255可被接收在框架2102的凸轮狭槽2142中。另外,枢轴销2415可被接收在框架2102的枢轴孔2430中。在泵致动器205联接到泵200的情况下并且当马达265被接通时,马达265使凸轮255在框架2102的凸轮狭槽2142内旋转。凸轮255在凸轮狭槽2142内的旋转运动导致马达265以大致上下运动的方式平移。因为马达265联接到致动器臂2100,所以马达265的平移导致致动器臂2100以大致上下运动的方式平移。致动器臂2100相对于框架2102移动。致动器臂2100的运动循环地将室壁215朝向基部230推动,从而压缩泵室300,并且然后将室壁215拉离基部230,从而使泵室300膨胀。在向下冲程中,流体通过排气阀245并通过通道2200从泵室300抽出。在向上冲程中,流体通过进气阀246被抽吸到泵室300中,并且泵室300膨胀。泵室300的这种循环压缩和膨胀在泵室300中产生负压,其中该负压可被供应给组织界面以减少组织界面中的压力。
[0131]
图27是示出可与治疗系统100的一些示例性实施方案相关联的负压源105的附加细节的泵致动器205的分解图。
[0132]
致动器臂2100包括具有第一端部2715和第二端部2720的细长主体2710。致动器臂2100可包括靠近第一端部2715的接收部2725。致动器臂2100还可包括远离接收部2725延伸并且终止于第二端部2720处的第一臂2730和第二臂2735。第一臂2730和第二臂2735可间隔开一定距离。第一臂2730可包括靠近第二端部2720的第一枢轴孔2740。第二臂2735可包括靠近第二端部2720的第二枢轴孔2745。第一枢轴孔2740和第二枢轴孔2745可被配置为接收枢轴销2415。致动器臂2100还可包括在接收部2725和第二端部2720之间分别延伸通过第一臂2730和第二臂2735的第一传动轴孔2400和第二传动轴孔2405。另外,致动器臂2100还可包括靠近第一端部2715的夹组件2750。夹组件2750可包括第一夹臂2755和第二夹臂2760。
[0133]
干燥剂2762可被接收在致动器臂2100的接收部2725中。干燥剂覆盖件2764可包括盖部分2765、第一夹臂2770和第二夹臂2775。第一夹臂2770可从干燥剂覆盖件2764的第一端部向下延伸,并且第二夹臂2775可从干燥剂覆盖件2764的与第一端部相对的第二端部向下延伸。另外,一个或多个开孔2780可延伸通过盖部分2765以提供通过干燥剂覆盖件2764的流体通路。开孔2780可用作通气孔。第一夹臂2770和第二夹臂2775可被配置为夹到致动器臂2100上以将干燥剂覆盖件2764保持在接收部2725上方,并且因此将干燥剂2762保持在
接收部2725中。干燥剂2762可被配置为从组织部位吸收水分和/或气味。
[0134]
框架2102可包括具有两个终端端部的主体2785。在一些实施方案中,如图27所示,主体2785可为c形的。框架2102还可包括位于主体2785的第一终端端部处的第一附接臂2144和位于主体2785的第二终端端部处的第二附接臂2146。第一附接臂2144和第二附接臂2146中的每一者的底部可包括一个或多个齿2148。另外,第一附接臂2144和第二附接臂2146中的每一者的顶部可分别包括从其向内延伸的第一引导构件2150和第二引导构件2152。
[0135]
图28是可与治疗系统100的一些实施方案相关联的图27的泵致动器与泵200的示例的等轴视图。负压源105可包括图27所示的泵致动器205和图16所示的泵200。如图28所示,框架2102可通过齿2148联接到外附接唇缘1915。致动器臂2100可通过夹组件2750联接到内附接唇缘1905。另外,致动器臂2100的夹组件2750的第一夹臂2755和第二夹臂2760可位于第一引导构件2150和第二引导构件2152之间。另外,如图28所示,干燥剂2762可被接收在接收部2725中,并且干燥剂覆盖件2764可联接到致动器臂2100以将干燥剂2762保持在接收部2725中。此外,凸轮255可位于致动器臂2100的第一臂2730和第二臂2735之间,并且凸轮255可联接到马达265的传动轴2410。马达265可相对于致动器臂2100可旋转地固定,使得马达265不相对于致动器臂2100旋转。另外,枢轴销2415可被接收在致动器臂2100中。致动器臂2100可被配置为围绕延伸通过枢轴销2415的枢转轴线2202旋转。
[0136]
图29是沿线29
‑
29的图28所示的负压源105的截面图。如图29所示,夹组件2750的第一夹臂2755可通过第一支点构件2900可枢转地附连到致动器臂2100的细长主体2710的外部。第一夹臂2755可具有从第一支点构件2900向上延伸的第一力臂部分2905和从第一支点构件2900向下延伸的第一负载臂部分2910。第一夹臂2755还可包括向内延伸的一个或多个齿2915,该一个或多个齿被配置为接合内附接唇缘1905以将致动器臂2100联接到泵200。另外,夹组件2750的第二夹臂2760可通过第二支点构件2920可枢转地附连到致动器臂2100的细长主体2710的外部。第二夹臂2760可具有从第二支点构件2920向上延伸的第二力臂部分2925和从第二支点构件2920向下延伸的第二负载臂部分2930。第二夹臂2760还可包括向内延伸的一个或多个齿2915,该一个或多个齿被配置为接合内附接唇缘1905以将致动器臂2100联接到泵200。
[0137]
如图29所示,致动器臂2100还可包括从细长主体2710向下延伸的突出部2935。突出部2935可位于接收部2725下方并且位于第一夹臂2755和第二夹臂2760之间。突出部2935还可包括延伸通过突出部2935的通道2200。通道2200将接收部2725与泵室300流体地联接。突出部2935的至少一部分可至少部分地延伸到排气管道240中。在一些实施方案中,突出部2935可向排气管道240提供结构稳定性。流体通道可从泵室300、通过排气阀245、通过通道2200、通过干燥剂2762并且通过干燥剂覆盖件2764中的开孔2780存在。在泵致动器205的操作期间,来自泵室300的排气穿过该流体通道。
[0138]
如图29中进一步所示,框架2102的第一附接臂2144和第二附接臂2146上的齿2148被示为与泵的外附接唇缘1915接合以将框架2102联接到泵200。
[0139]
在一些实施方案中,可通过如箭头c所示将第一附接臂2144和第二附接臂2146的顶部朝向彼此推动,从泵200移除泵致动器205。如果第一附接臂2144和第二附接臂2146被向内推动,则第一附接臂2144和第二附接臂2146的齿2148与外附接唇缘1915脱离。另外,如
果第一附接臂2144和第二附接臂2146被向内推动,则第一引导构件2150和第二引导构件2152分别抵靠第一力臂部分2905和第二力臂部分2925推动,从而将它们向内推动并且将第一负载臂部分2910和第二负载臂部分2930向外推动。这使第一夹臂2755和第二夹臂2760的齿2915与内附接唇缘1905脱离。然后可将泵致动器205从泵200提升。
[0140]
图30是图28所示的负压源105的顶视图,其示出了可与治疗系统100的一些实施方案相关联的附加细节。图30示出了可包封泵致动器205的外壳430的另一个示例。
[0141]
图31是沿线31
‑
31的图30所示的负压源105的截面图。如图31所示,在一些实施方案中,泵致动器205还可包括外壳430,该外壳包封致动器臂2100、框架2102、干燥剂2762、干燥剂覆盖件2764、马达265、凸轮255和枢轴销2415。另外,泵致动器205可包括与马达265电联接并为其供电的电能源,诸如一个或多个电池415。泵致动器205还可包括凸轮接合构件2425,该凸轮接合构件可固定在外壳430内。凸轮接合构件2425包括凸轮狭槽2142和枢轴孔2430。枢轴销2415可被接收在枢轴孔2430中。在一些实施方案中,枢轴销2415可旋转地固定在枢轴孔2430中。在一些实施方案中,枢轴销2415可相对于枢轴孔2430旋转。另外,凸轮255可被接收在凸轮狭槽2142中。
[0142]
在操作中,当泵致动器205的马达265接收电力时,马达265使凸轮255在框架2102的凸轮狭槽2142内旋转。凸轮255在凸轮狭槽2142内的旋转运动导致马达265以大致上下运动的方式平移。因此,马达的平移导致致动器臂2100围绕枢转轴线2202的枢转运动。在致动器臂2100联接到泵200的凸台1900的情况下,致动器臂2100的枢转运动循环地向下推动室壁215,从而压缩泵室300,并且然后向上拉动室壁215,从而使泵室300膨胀。在向下冲程中,流体从泵室300、通过排气阀245、通过通道2200、通过干燥剂2762并且通过干燥剂覆盖件2764中的开孔2780抽出。在向上冲程中,流体通过进气阀246被抽吸到泵室300中,并且泵室300膨胀。泵室300的这种循环压缩和膨胀在泵室300中产生负压,其中该负压可被供应给组织界面以减少组织界面中的压力。
[0143]
尽管图31中未示出,但在一些实施方案中,泵致动器205还可包括印刷电路板,该印刷电路板可与电能源和马达265电联接。印刷电路板可包括用于控制马达265的操作的各种电元件和电路。
[0144]
图32是可与治疗系统100的一些实施方案相关联的敷料110的示例的等轴视图。如图32所示,在一些实施方案中,泵200可联接到敷料110。例如,泵200可联接到覆盖件120。在一些实施方案中,泵200可永久性地联接到覆盖件120并且可以是一次性泵。如果敷料110被移除并丢弃,则泵200可与敷料110一起丢弃。在一些实施方案中,泵200可与覆盖件120可释放地联接。泵200可使用合适的粘合剂来联接到覆盖件120。例如,在一些实施方案中,泵200的基部230可被流体地密封到覆盖件120。在泵200可释放地联接到覆盖件120的实施方案中,泵200可重复使用。因此,泵200可从覆盖件120移除并且联接到新覆盖件。
[0145]
图33是沿线33
‑
33的图32所示的敷料110的截面图。如图33所示,覆盖件120可放置在组织界面115上方,以在覆盖件120与组织部位之间形成密封空间。泵200可通过覆盖件120流体地联接到组织界面115。例如,覆盖件120可包括开孔3300,该开孔提供组织界面115和泵200之间的流体路径。泵200可包括室组件210、进气阀246和排气阀245。泵200的进气阀246可与组织界面115流体地联接。
[0146]
如图33的示例中进一步所示,在一些实施方案中,液体
‑
空气分离器3305可位于泵
200和覆盖件120之间。液体
‑
空气分离器3305可用于防止液体通过覆盖件120中的开孔3300离开组织界面115。液体
‑
空气分离器3305可与泵200可操作地相关联以允许气体连通,但基本上防止组织界面115和泵200之间的液体连通。在示例性实施方案中,基本上平面的液体
‑
空气分离器3305可以是防止液体进入泵室300的疏水性或疏油性过滤器。合适的疏水性材料的示例包括膨胀ptfe层压体,诸如由特拉华州纽瓦克的wl gore&associates(wl gore&associates,newark,delaware)制造的疏水性医用膜;由general electric制造的eptfe过滤膜;或任何其他合适的膜。在一个实施方案中,这种层压体在非织造聚酯上可具有1.0微米的参考孔径,其厚度范围为约0.17毫米至约0.34毫米。疏水性医用膜可在1巴(15psi)下具有约18lpm/cm2的最小空气流并具有1.1巴(16.0psi)的最小进水压力。合适的疏油性材料的示例包括疏油性膨胀ptfe膜,该膜在非织造聚酯上具有1.0微米的参考孔径,其厚度范围为约0.15毫米至约0.39毫米。疏油性膜可在1巴(15psi)下具有约12lpm/cm2的最小空气流并具有0.8巴(12.0psi)的最小进水压力。另选地,基本上平面的液体
‑
空气分离器3305可以是基于重力的屏障系统,或者包括亲水性表面以在流体流在表面上经过时促进冷凝或液体与流体流的其他分离的设备。液体
‑
空气分离器3305的其他示例可包括烧结金属、烧结尼龙、专用纤维过滤器(诸如由filtrona制造的那些)、已被等离子体处理以致使表面亲水的塑料,或能够将液体与流体流分离或以其他方式能够基本上防止液体通过并同时允许气体通过的任何其他材料或设备。
[0147]
在泵200的操作期间,在向下冲程中,泵室300被压缩,从而通过排气阀245从泵室300抽出流体。在向上冲程中,流体从组织界面115抽吸、通过液体
‑
空气分离器3305、通过进气阀246并进入泵室300中,从而使泵室300膨胀。泵室300的这种循环压缩和膨胀在泵室300中产生负压,其中该负压可被供应给组织界面115以减少组织界面115中的压力。
[0148]
图34是可与治疗系统100的一些实施方案相关联的敷料110的另一个示例的等轴视图。如图34所示,敷料可包括泵200,其中泵200可为波纹管泵。另外,泵致动器205可联接到敷料110,如箭头d所示。
[0149]
本文所述的系统、装置和方法可提供显著优点。例如,负压源105可以小尺寸制造以允许患者将负压源105分离地穿戴在衣服下。另外,在一些实施方案中,当泵200与敷料110一起被丢弃时,可重复使用泵致动器205而无需更换或消毒泵致动器205。这可尤其是从组织界面115抽出的流体不穿过泵致动器205的情况。另外,由于泵200与敷料110的联接,可减小组织界面115和负压源105之间的流体泄漏的发生率。这种布置消除了敷料110与负压源105之间的附加流体导体。
[0150]
虽然在几个例示性实施方案中示出,但本领域的普通技术人员将认识到,本文的系统、装置和方法易于进行各种变化和修改,并且这些变化和修改落入所附权利要求的范围。此外,除非上下文明确要求,否则使用术语诸如“或”的各种替代方案的描述不需要相互排斥,并且除非上下文明确要求,否则不定冠词“一”或“一个”不将主题限制于单个实例。出于销售、制造、组装或使用的目的,也可能以各种配置组合或消除部件。例如,在一些构造中,敷料110、容器115或两者可被消除或与其他部件的制造或销售分离。在其他示例性构造中,控制器125还可独立于其他部件来制造、配置、组装或销售。
[0151]
所附权利要求阐述了上述主题的新颖和创造性方面,但权利要求也可涵盖未具体引用的附加主题。例如,如果不需要区分新颖和创造性特征与本领域普通技术人员已知的
特征,则可从权利要求省略某些特征、元件或方面。在不脱离由所附权利要求限定的本发明的范围的情况下,本文在一些实施方案的背景下所述的特征、元件和方面也可通过用于相同、等同或类似目的的另选特征来省略、组合或替换。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1