用于一次性刮刀和小圆锯的力吸收系统的制作方法
1.本公开大体上涉及手持式旋转医疗装置,并且更具体地涉及具有一次性刮刀和小圆锯的手持式旋转医疗装置。
背景技术:
2.手持式旋转医疗装置通常包括可拆卸工作端,所述可拆卸工作端通常是刮刀或小圆锯。可拆卸工作端通常经由许多可释放连接系统中的任一个附接到手持式装置。可释放连接系统使得能够快速且容易地移除和更换或交换可拆卸工作端。可释放连接系统还使得能够有效且容易地更换一次性工作端。
技术实现要素:
3.公开了一种用于手持式旋转医疗装置的驱动系统,其包括并入驱动系统的驱动联接件中的力吸收系统。力吸收系统可以包括在驱动联接件中,由此力吸收系统吸收与驱动联接件的纵向轴线对准的线性力。因此,力吸收系统允许旋转手术器械相对于驱动轴和手持式壳体的有限线性移动,所述旋转手术器械可以是刮刀、小圆锯等。
4.在至少一个实施例中,一种用于手持式旋转医疗装置的驱动系统包括被构造成定位在驱动电机与旋转手术器械之间的驱动联接件,以及并入驱动联接件中的力吸收系统,由此力吸收系统吸收与驱动联接件的纵向轴线对准的线性力。力吸收系统可以由驱动联接件的中空圆柱形近端形成,其中形成所述驱动联接件的中空圆柱形近端的材料包括多个释放槽(relief slot)和定位在所述中空圆柱形近端中的接合突起,所述接合突起用于接合所述驱动系统的驱动轴。多个释放槽中的相邻释放槽可以彼此周向地偏移。所述多个释放槽可以组织成行,其中至少一行包括至少两个释放槽,所述至少两个释放槽各自跨越所述驱动联接件的圆周的约四分之一。各行释放槽可以各自包括至少两个释放槽,所述至少两个释放槽各自跨越所述驱动联接件的圆周的四分之一,其中释放槽与相邻行的释放槽周向地偏移。
5.在至少一个实施例中,所述力吸收系统可以由所述驱动联接件的中空圆柱形近端形成,并且可以包括从所述驱动联接件的近端向近侧延伸的多个力传输突出部。所述力传输突出部可以包括成角度的近端,所述成角度的近端被构造成接合成角度的驱动表面,使得朝向所述成角度的驱动表面施加到所述力吸收系统的线性力使所述力传输突出部径向向外偏转。所述力吸收系统可包括定位在所述中空圆柱形近端中的接合突起,所述接合突起用于接合所述驱动系统的驱动轴。所述力传输突出部可以相隔180度定位。
6.在至少一个实施例中,所述力吸收系统可以由以下形成:所述驱动联接件的圆柱形近端,所述驱动联接件包括从所述近端向近侧延伸的接合突起,所述接合突起用于接合所述驱动系统的驱动轴;以及被构造成接触驱动轴的在所述驱动联接件的近端上的所述接合突起的每一侧上的至少一个力吸收器。所述力吸收器可以是但不限于片簧。
7.在至少一个实施例中,所述力吸收系统可以由所述驱动联接件的中空圆柱形近端
形成,其中形成所述驱动联接件的中空圆柱形近端的材料包括形成翼的多个释放槽和定位在所述中空圆柱形近端中的接合突起,所述接合突起用于接合所述驱动系统的驱动轴。
8.在至少一个实施例中,所述力吸收系统可以由所述驱动联接件的中空圆柱形近端形成,并且可以包括从所述驱动联接件的近端向近侧延伸并且被构造成接触所述驱动系统的驱动轴的多个钉。所述钉中的至少一个可以由与所述驱动联接件的近端对准的基部部分和从所述基部部分径向向内成角度的尖端部分形成。所述多个钉可包括四个钉,每个钉由与所述驱动联接件的近端对准的基部部分和从所述基部部分径向向内成角度的尖端部分形成。所述钉中的每一个可以在所述驱动联接件的近端上与相邻钉呈周向90度定位。
9.在至少一个实施例中,所述力吸收系统可以由所述驱动联接件的中空圆柱形近端形成。减震器可以定位在所述近端的中空腔室内并且暴露以接触所述驱动系统的驱动轴。所述力吸收系统可包括从所述中空腔室的内表面径向向内延伸的多个突出部,以接合所述驱动系统的驱动轴中的接收器。在至少一个实施例中,所述减震器可以是螺旋弹簧。
10.在至少一个实施例中,所述力吸收系统可以由所述驱动联接件的圆柱形近端、从所述驱动联接件的圆柱形近端的外表面径向向外延伸的凸缘以及联接到所述驱动联接件的近端的减震器形成。在至少一个实施例中,所述减震器可以是螺旋弹簧。所述螺旋弹簧可以至少部分地在所述近端处包围所述驱动联接件。
11.力吸收系统的一个优点在于力吸收系统使一次性器械与电机驱动器对准。
12.力吸收系统的另一优点在于力吸收系统向一次性器械的内部构件提供轴向力以维持远端切割构件的位置。
13.力吸收系统的又一优点在于力吸收系统减少一次性器械与电机驱动器之间的公差叠加。
14.力吸收系统的另一优点在于力吸收系统提供使内轮毂与电机驱动器之间的滑移效应最小化的方法。
15.力吸收系统的再一优点在于力吸收系统是提供上文所列益处的低成本方法,同时例如通过消除对弹簧保持器的需要来最小化部件的数目。
16.这些和其它实施例在下文更详细地描述。
附图说明
17.图1是被构造成接收包括力吸收系统的驱动系统的驱动联接件的手持式旋转医疗装置的透视图。
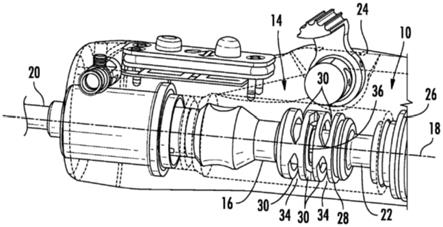
18.图2是沿着截面线2
‑
2截取的图1的手持式旋转医疗装置的一部分的横截面图。
19.图3是图2的具有力吸收系统的驱动联接件的近端的部分透视图。
20.图4是图3的具有力吸收系统的驱动联接件的近端的另一透视图。
21.图5是沿着截面线2
‑
2截取的具有力吸收系统的另一实施例的图1的手持式旋转医疗装置的一部分的横截面图。
22.图6是图5的具有力吸收系统的驱动联接件的近端的部分透视图。
23.图7是图6的具有力吸收系统的驱动联接件的近端的另一透视图。
24.图8是沿着截面线2
‑
2截取的具有力吸收系统的又一实施例的图1的手持式旋转医疗装置的一部分的横截面图。
25.图9是图8的具有力吸收系统的驱动联接件的部分透视图。
26.图10是图9的具有力吸收系统的驱动联接件的另一透视图。
27.图11是沿着截面线2
‑
2截取的具有力吸收系统的另一实施例的图1的手持式旋转医疗装置的一部分的横截面图。
28.图12是图11的具有力吸收系统的驱动联接件的侧视图。
29.图13是图11的具有力吸收系统的驱动联接件的透视图。
30.图14是沿着截面线2
‑
2截取的具有力吸收系统的另一实施例的图1的手持式旋转医疗装置的一部分的横截面图。
31.图15是图14的具有力吸收系统的驱动联接件的透视图。
32.图16是图14的具有力吸收系统的驱动联接件的近端的侧视图。
33.图17是沿着截面线2
‑
2截取的具有力吸收系统的又一实施例的图1的手持式旋转医疗装置的一部分的横截面图。
34.图18是图17的具有力吸收系统的驱动联接件的透视图。
35.图19是图17的具有力吸收系统的驱动联接件的近端的部分透视图。
36.图20是图17的具有力吸收系统的驱动联接件的近端的另一部分透视图。
37.图21是沿着截面线3
‑
3截取的具有力吸收系统的又一实施例的图1的手持式旋转医疗装置的一部分的横截面图。
38.图22是图21的具有力吸收系统的驱动联接件的侧视图。
39.图23是图21的具有力吸收系统的驱动联接件的近端的透视图。
40.图24是图2的具有力吸收系统的驱动联接件的近端的另一构造的透视图。
具体实施方式
41.如图1
‑
24中所示,公开了一种用于手持式旋转医疗装置12的驱动系统10,所述驱动系统包括并入驱动系统10的驱动联接件16中的力吸收系统14。力吸收系统14可包括在驱动联接件16中,由此力吸收系统14吸收与驱动联接件16的纵向轴线18对准的线性力。因此,力吸收系统14允许旋转手术器械20相对于驱动轴22和手持式壳体24的有限线性移动,所述旋转手术器械可以是刮刀、小圆锯等。
42.在至少一个实施例中,驱动系统10可以被配置成用于手持式旋转医疗装置12。驱动系统10可包括驱动联接件16,该驱动联接件被构造成定位在驱动电机26与旋转手术器械20之间。驱动系统10还可包括并入驱动联接件16中的力吸收系统14,由此力吸收系统14吸收与驱动联接件16的纵向轴线18对准的线性力。
43.在至少一个实施例中,如图2
‑
4中所示,力吸收系统14可由驱动联接件16的中空圆柱形近端28形成。形成驱动联接件16的中空圆柱形近端28的材料可包括至少一个释放槽30,该至少一个释放槽被构造成当置于线性力下时偏转,从而使得驱动联接件16能够相对于驱动系统10的驱动轴22线性移动。释放槽30的形状可以是大体上细长的,并且可以是矩形、卵形、椭圆形等。形成释放槽30的拐角可以是圆形的。释放槽可以定位成围绕驱动联接件16大体上周向地延伸,所述驱动联接件在至少一个实施例中可以大体上正交于驱动联接件16的纵向轴线18。释放槽30的周向长度可以是任何适当长度。在至少一个实施例中,释放槽30的周向长度可以在驱动联接件16的周向长度的约八分之一与四分之三之间,并且在至
少一个实施例中,在驱动联接件16的总圆周的四分之一与一半之间。
44.在至少一个实施例中,力吸收系统14可包括多个释放槽30,如图2和图3中所示。多个释放槽30可以被构造成使得多个释放槽30中的相邻释放槽30彼此周向地偏移。多个释放槽30可组织成一个或多个释放槽30的行34。行34可以线性分开,并且行34可以围绕驱动联接件16周向地延伸。在至少一个实施例中,两个或更多个释放槽30可组织成行34。形成单个行34的多个释放槽30可以围绕驱动联接件16周向地端到端延伸。形成单个行34的多个释放槽30可各自在驱动联接件16的周向长度的约八分之一与一半之间,并且在至少一个实施例中,可在驱动联接件16的周向长度的八分之一与一半之间,例如但不限于为驱动联接件16的圆周的四分之一。相邻行34中的相邻释放槽30可以从相邻行34中的释放槽30周向地偏移。在至少一个实施例中,相邻行34的释放槽30可以周向地偏移约20度与约180度之间,并且在至少一个实施例中,可以周向地偏移约90度。单个行34的任一侧上的相邻行34中的释放槽30可以彼此对准,并且形成中间行34的释放槽34可以相对于两个相邻行34偏移。驱动联接件16中可能存在任何适当数目行34的释放槽30。在至少一个实施例中,驱动联接件16可包括在一行至六行34之间的释放槽30,且具体地并且不作为限制,可包括三行34释放槽。
45.如图3和图4中所示,力吸收系统14可包括定位在中空圆柱形近端28中的接合突起32,该接合突起用于接合驱动系统10的驱动轴22。接合突起32可以具有用于将旋转运动通过接合突起32从驱动轴22传递到驱动联接件16的任何适当构造。在至少一个实施例中,驱动轴22可包括用于接收接合突起32的槽36。接合突起32可以具有圆形边缘,并且可以具有圆形端以促进平滑插入到驱动轴22中的槽36中。
46.在另一实施例中,如图24中所示,除了释放槽可具有另一构造之外,力吸收系统14可类似于图2
‑
4中所示的实施例形成。因而,图24中所示的实施例可包括上文所列且在图2
‑
4中所示并在此处详细论述的元件。相反,上面的描述并入此处以用于描述图24。另外,图24的力吸收系统14的释放槽30中的一个或多个可以定位成与驱动联接件16的纵向轴线18不正交且不平行。释放槽30可形成螺旋构造,使得当释放槽30围绕驱动联接件16周向地延伸时,释放槽30相对于驱动联接件16的纵向轴线18成角度。释放槽30可以彼此平行地对准。在其它实施例中,螺旋释放槽30中的一个或多个可相对于彼此不对准。
47.在驱动联接件16的另一实施例中,如图5
‑
7中所示,力吸收系统14可以由驱动联接件16的中空圆柱形近端28形成,并且可包括从驱动联接件16的近端28向近侧延伸的多个力传输突出部38。力传输突出部38可包括成角度的近端28,该成角度的近端被构造成接合成角度的驱动表面40,使得朝向成角度的驱动表面40施加到力吸收系统14的线性力使力传输突出部38径向向外偏转,从而允许驱动联接件16沿着驱动联接件16的纵向轴线18的有限线性移动。力传输突出部38径向向外的挠曲产生储存在突出部38内的力,当从驱动联接件16移除力,从而在近侧方向上用力推驱动联接件时,挠曲的突出部38使驱动联接件16沿着驱动联接件16的纵向轴线18在远侧方向上线性地移动。
48.力传输突出部38可以具有任何适当的构造。在至少一个实施例中,力传输突出部38可具有被构造成接触成角度的驱动表面40的成角度的接触表面42。力传输突出部38的成角度的接触表面42可以被构造成使得突出部38包括突出部38上的尖端44,由此尖端44在突出部38的径向最外面部分上。力传输突出部38的成角度的接触表面42可以从尖端44径向向内延伸。在至少一个实施例中,力传输突出部38的成角度的接触表面42也可以从尖端44向
远侧延伸。对应的成角度的驱动表面40可具有成角度的表面,该成角度的表面具有小于近侧直径的远侧直径。成角度的驱动表面40可以定位在驱动系统10内,使得在驱动联接件16沿着驱动联接件16的纵向轴线18线性移动时,力传输突出部38接触成角度的驱动表面40。成角度的驱动表面40可以是圆锥形表面,其具有与驱动联接件16的纵向轴线18对准的纵向轴线。
49.驱动联接件16可包括一个或多个力传输突出部38。在至少一个实施例中,驱动联接件16可包括两个或更多个力传输突出部38。在具有两个力传输突出部38的一个实施例中,力传输突出部38可以相隔180度定位。在具有多于两个力传输突出部38的实施例中,力传输突出部38可彼此等距地或呈交替构造间隔开。
50.驱动联接件16可包括一个或多个止动件46,该一个或多个止动件被构造成限制驱动联接件16沿着纵向轴线18的线性移动的量。在至少一个实施例中,如图5和图6中所示,驱动联接件16可包括两个止动件46。止动件46可以彼此分离,其中每个止动件46定位在力传输突出部38之间。止动件46可邻近驱动联接件16的径向外表面定位,类似于力传输突出部38。止动件42可以构造有弯曲表面48,该弯曲表面接触来自成角度的驱动表面40的突起50。在至少一个实施例中,突起50可以相隔约180度定位在成角度的驱动表面40上。
51.图6和图7中所示的驱动联接件还可包括定位在中空圆柱形近端28中的接合突起32,该接合突起用于接合驱动系统10的驱动轴22。图2中所示的接合突起32可以类似于图3和图4中所示的接合突起32。
52.在力吸收系统14的另一实施例中,如图8
‑
10中所示,力吸收系统14可由驱动联接件16的圆柱形近端28形成,所述驱动联接件包括从近端28向近侧延伸的接合突起32,该接合突起用于接合驱动系统10的驱动轴22。图3中所示的接合突起32可以类似于图3和图4中所示的接合突起32。图3中所示的接合突起32可以比驱动联接件16的任何其它部分向近侧延伸得更远。图3中所示的接合突起32可以从板52延伸。
53.图8
‑
10中所示的力吸收系统14可包括被构造成接触驱动轴22的在驱动联接件16的近端28上的接合突起32的每一侧上的至少一个力吸收器54。力吸收器54可以被构造成使得驱动联接件16能够沿着驱动联接件16的纵向轴线18线性移动,同时还提供对此类移动的阻力。当驱动联接件16抵靠力吸收器54进一步向近侧移动时,抵靠驱动联接件16施加到力吸收器54的力的量增加。在至少一个实施例中,力吸收器54可以从板52向近侧突出,从而形成驱动联接件16的近端28。在至少一个实施例中,力吸收系统14可包括两个或更多个力吸收器54。力吸收器54可以从驱动联接件16的近端28向近侧延伸,并且可以定位在接合突起32的相对侧上。力吸收器54可由任何适当材料,例如但不限于塑料、金属和柔韧材料(例如橡胶)形成。在至少一个实施例中,塑料力吸收器54可被构造成驱动联接件16的一部分。在至少一个实施例中,力吸收器54可以是片簧。
54.在力吸收系统14的另一实施例中,如图11
‑
13中所示,力吸收系统14可由驱动联接件16的中空圆柱形近端28形成,其中形成驱动联接件16的中空圆柱形近端28的材料包括形成翼56的至少一个释放槽30。翼56可以成形为使得翼56在与驱动联接件16的纵向轴线18对准的近侧方向上的宽度大于在相同方向上测量的相邻释放槽的宽度。翼56可以围绕驱动联接件16周向地弯曲移动。特别地,翼56可以从第一附接点58围绕驱动联接件16的一部分周向地且向近侧延伸到第一附接点58与第二附接点60之间的中间点62。从中间点62到第二附
接点60,翼56围绕驱动联接件16的一部分周向地且向远侧延伸到第二附接点60。在至少一个实施例中,力吸收系统14可包括两个或更多个翼56。在具有两个翼56的实施例中,翼56可具有相同长度或不同长度。翼56可以延伸小于驱动联接件的圆周的四分之三。在至少一个实施例中,翼56的长度可以等于或小于驱动联接件的周向长度的一半。在这样的构造中,如图11
‑
13中所示,当正交于驱动联接件16的纵向轴线18观察时,翼可以是非线性的,并且可以形成正交于驱动联接件16的纵向轴线18延伸的凹槽64。当驱动联接件16附接到驱动轴22时,突起66可以从驱动轴22径向向外延伸,并且驻留在形成在翼56之间的凹槽64内。
55.图11
‑
13中所示的驱动联接件还可包括定位在中空圆柱形近端28中的接合突起32,该接合突起用于接合驱动系统10的驱动轴22。图4中所示的接合突起32可以类似于图1中所示的接合突起32,并且可以如结合图3和图4中的接合突起32在上面的描述中阐述的那样构造。
56.在力吸收系统14的另一实施例中,如图14
‑
16中所示,力吸收系统14可由驱动联接件16的中空圆柱形近端28形成,并且可包括从驱动联接件16的近端28向近侧延伸且被构造成接触驱动系统10的驱动轴22的多个钉68。钉68中的一个或多个可由与驱动联接件16的近端28对准的基部部分70和从基部部分70径向向内成角度的尖端部分72形成。在至少一个实施例中,力吸收系统14可包括两个钉68,每个钉由基部部分70和尖端部分72形成,所述基部部分与驱动联接件16的纵向轴线18对准并且从驱动联接件16的近端28延伸,所述尖端部分从基部部分70径向向内成角度。如果力吸收系统14包括多个钉68,那么钉68可以彼此等距地或以另一种方式定位。在具有四个钉68的实施例中,钉68中的每一个可以在驱动联接件16的近端28上与相邻钉68呈周向180度定位。在至少一个实施例中,钉68的基部部分70从驱动联接件16的近端28向近侧延伸,并且从近端28的周边76延伸。可以基于用于形成钉68的材料和施加到驱动联接件16的预期线性力来确定钉68的厚度。钉68可被构造成径向向外挠曲以提供驱动联接件16的有限线性移动,同时产生储存在钉68内的线性力,当从驱动联接件16移除力,从而迫使在近侧方向上用力推驱动联接件时,挠曲的钉68使驱动联接件16沿着驱动联接件16的纵向轴线18在远端方向上线性移动。
57.图14
‑
16中所示的驱动联接件还可包括定位在中空圆柱形近端28中的接合突起32,该接合突起用于接合驱动系统10的驱动轴22。图6中所示的接合突起32可以类似于图1中所示的接合突起32,并且可以如结合图3和图4中的接合突起32在上面的描述中阐述的那样构造。
58.在力吸收系统14的另一实施例中,如图17
‑
20中所示,力吸收系统14可由驱动联接件16的中空圆柱形近端28形成,其中减震器78定位在近端28的中空腔室80内并且暴露以接触驱动系统10的驱动轴22。减震器78可定位成接触驱动轴22以提供驱动联接件16的有限线性移动,同时产生储存在减震器78内的线性力,当从驱动联接件16移除力,从而在近侧方向上用力推驱动联接件时,减震器78使驱动联接件16沿着驱动联接件16的纵向轴线18在远端方向上线性地移动。减震器78可以由任何适当的材料形成,并且可以是螺旋弹簧。力吸收系统14还可包括从中空腔室80的内表面84径向向内延伸的多个突出部82,以接合驱动系统的驱动轴22中的接收器88。(图7)突出部82可以具有任何适当的大小和数目以将旋转运动从驱动轴22传输到驱动联接件16。在至少一个实施例中,力吸收系统14可包括两个突出部82。
59.在力吸收系统14的另一实施例中,如图21
‑
23中所示,力吸收系统14可由驱动联接
件16的圆柱形近端28、从驱动联接件16的圆柱形近端28的外表面92径向向外延伸的凸缘90以及联接到驱动联接件16的近端28的减震器94形成。减震器94可以围绕驱动联接件16的外表面延伸。当减震器94接触驱动轴22时,减震器94可抵靠在凸缘90上。减震器94可以由任何适当的材料形成,并且可以是螺旋弹簧。在至少一个实施例中,螺旋弹簧94可以至少部分地在近端28处包围驱动联接件16。
60.图5中所示的力吸收系统14可由驱动联接件16的圆柱形近端28形成,所述驱动联接件包括从近端28向近侧延伸的接合突起32,该接合突起用于接合驱动系统10的驱动轴22。图5中所示的接合突起32可以类似于图1中所示的接合突起32。图5中所示的接合突起32可以比驱动联接件16的任何其它部分向近侧延伸得更远。
61.提供前述内容是为了说明、解释和描述本发明的实施例。对这些实施例的修改和改变对于本领域技术人员来说将是显而易见的,并且可以在不脱离本发明的范围或精神的情况下进行。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1