手术工具及方法与流程
手术工具及方法
背景技术:
1.随着现代手术技术的侵入性越来越小,外科医生必须经常应对由最小手术切口和周围解剖结构产生的狭小空间。在涉及骨操作的手术中,在骨内部和骨周围通常紧密地包裹着诸如肌腱、肌肉、皮肤和相邻骨之类的解剖结构,需要外科医生在手术过程中对骨施加显著的线性或旋转力以移动、调整或旋转骨。
2.例如,在足科手术的情况下,外科医生必须经常沿一个或多个定义的平面移动、调整或旋转脚部的骨。如图1中人类左脚2的环境所示,这些定义的平面包括矢状面4、横向面6和额状面8。比较图1与图2,图2描绘了左脚10的正常骨骼排列,每个跖骨12、近端骨14和远端骨16位于矢状面4、横向面6和额状面8内。
3.在拇囊炎矫正手术的特定情况下,对跨越垂直平面的线性和旋转骨运动的需求是显而易见的。图3描绘了在图2的左脚10已经形成拇囊炎症状之后的左脚10。如通过比较图2中的正常骨骼排列与图3中拇囊炎症状发展之后的骨骼排列可以最佳地理解到的,第一跖骨20和第二跖骨头部22之间的间距18增大。这部分地由于第一跖骨20及其相关的籽骨对24的逆时针旋转。
4.通过将图1至图3与参考图4a至图4c最佳理解的期望矫正进行比较,可以最佳地理解对图3中描绘的拇囊炎症状进行矫正手术的目的。在图4a中描绘了图2的左脚的正常骨骼排列10沿着第一跖骨头26处的近似额状面截取的前视横截面图。在该视图中,图4a描绘了正确定位的第一跖骨20及其第一跖骨头26,相关的籽骨24也正确地定位在第一跖骨头26的正下方。
5.现在参考图4b,描绘了在图3的拇囊炎症状发展之后,骨骼排列10的类似前视横截面图。在该视图中,图4b描绘了第一跖骨20及其第一跖骨头26沿逆时针方向旋转,以及籽骨24与第一跖骨头26一起朝着在第一跖骨20和第二跖骨22之间形成的增加的间距18旋转。
6.现在参考图4c,图4c是图2和图3的骨骼排列10的进一步前视横截面图,描绘了矫正拇囊炎手术的期望目标,其通过使第一跖骨头26和籽骨24从图4b中描绘的拇囊炎症状位置顺时针转动或旋转28到类似于图4a中描绘的正常位置的位置。
7.尽管在此使用拇囊炎矫正手术作为示例,但是外科医生在对人体和动物解剖结构的其它部分的骨进行手术时还必须应对类似的手术限制,需要在定义解剖平面内和跨过定义解剖平面进行类似的骨旋转、调整和操作。
技术实现要素:
8.一种用于接合和操纵骨的手术工具和方法,包括工具本体,该工具本体具有主体轴线、螺纹端和操作端,该螺纹端具有螺纹和工具止动部。该操作端被定位成允许使用者抓握、操纵和绕着主体轴线旋转工具本体。该螺纹被定位成当工具本体被绕着主体轴线沿钻孔方向旋转时,允许手术工具钻孔到骨中并接合骨,螺纹随着工具本体被绕着主体轴线沿钻孔方向旋转而允许拧紧与骨的接合。工具止动部被定位成防止工具被进一步绕着主体轴线旋转,以防止在工具止动部接触骨时进一步钻孔到骨中。手术工具因此允许在工具与骨
紧密接合时利用手术工具操纵、移动和旋转骨。
9.在一些实施例中,导孔基本上沿着主体轴线延伸穿过工具本体。导孔允许定位引导件至少部分地延伸穿过工具本体,并且在骨钻孔位置处延伸到骨中,以对准手术工具的螺纹并且引导至骨钻孔位置。
附图说明
10.为了更完整地认识和理解本发明及其诸多优点,将结合附图参考以下详细说明。
11.图1描绘了人类左脚的定义的主要平面;
12.图2描绘了人类左脚的正常骨骼排列的前视立体图;
13.图3描绘了图2的人类左脚在拇囊炎症状发展之后的骨骼排列的前视立体图;
14.图4a以前视角度描绘了图2的正常骨骼排列的沿着第一跖骨头处的近似额状面截取的横截面图;
15.图4b描绘了图2的骨骼排列在拇囊炎症状发展之后的横截面图;
16.图4c描绘了图2的骨骼排列的在拇囊炎症状的矫正期间的横截面图;
17.图5a描绘了根据本发明的一个实施例的手术工具的前视立体图;
18.图5b描绘了图5a的手术工具的沿着图5a的线5b-5b截取的前视横截面图;
19.图6a描绘了图5a的手术工具的螺纹端的放大前视图。
20.图6b描绘了根据本发明的一个实施例的手术工具的螺纹端的放大前视图;
21.图7描绘了图3的骨骼排列的在将导丝插入第一跖骨头中之后的前视立体图和放大图;
22.图8描绘了图4的骨骼排列的立体图,其中本发明的手术工具被施加到导丝;
23.图9描绘了图8的骨骼排列的立体图和放大图,其中手术工具被定位在钻孔位置处;
24.图10描绘了图10的骨骼排列的立体图和插图,其中工具钻孔到第一跖骨头中并且与第一跖骨头螺纹接合;
25.图11a描绘了根据本发明的一个实施例的手术工具的前视立体图;
26.图11b描绘了图11a的手术工具的沿着图11a的线11b-11b截取的前视横截面图;
27.图12a描绘了根据本发明的一个实施例的手术工具的前视图;
28.图12b描绘了图12a的手术工具的前视立体图;
29.图13a描绘了根据本发明的一个实施例的手术工具的前视图;
30.图13b描绘了图13a的手术工具的前视立体图;
31.图14描绘了根据本发明的一个实施例的手术工具的前视立体图;
32.图15描绘了根据本发明的一个实施例的手术工具的前视立体图;
33.图16描绘了根据本发明的一个实施例的手术工具的前视立体图;
34.图17描绘了根据本发明的一个实施例的手术工具的前视立体图;
35.图18描绘了根据本发明的一个实施例的手术工具的前视立体图;
36.图19描绘了根据本发明的一个实施例的手术工具的前视立体图;
37.图20描绘了根据本发明的一个实施例的手术工具的前视立体图;
38.图21描绘了根据本发明的一个实施例的手术工具的前视立体图;
39.图22描绘了根据本发明的一个实施例的手术工具的前视立体图;
40.图23a描绘了根据本发明的一个实施例的手术工具的前视图;
41.图23b描绘了根据本发明的一个实施例的手术工具的前视横截面分解视图;
42.图24a描绘了根据本发明的一个实施例的手术工具的前视立体图;
43.图24b描绘了根据本发明的一个实施例的手术工具的前视图;
44.图25a描绘了根据本发明的一个实施例的丝线角度工具的立体图;以及
45.图25b描绘了根据本发明的一个实施例的图25a的线成角度工具被定位在左脚上以将导丝对齐到第一跖骨头中的侧视图。
具体实施方式
46.参考附图,在多个实施例和附图中,相似的附图标记用于表示相同或对应的部分。在一些附图中,在相应部分中的一些具体实施例变型通过对附图标记添加小写字母来表示。
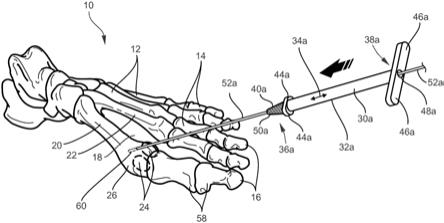
47.图5a描绘了本发明的手术工具30a的立体图,该手术工具30a包括具有主体轴线34a、螺纹端36a和操作端38a的工具本体32a。锥形形状的顺时针钻孔螺纹40a被定位在螺纹端36a处,并且被定向成当手术工具30a被绕着主体轴线34a沿着向右且顺时针的钻孔方向42a旋转时在骨材料中打钻或钻孔。螺纹端36a还包括:工具止动部44a,该工具止动部包括从工具本体32a向外延伸并且略高于螺纹40a的两个小板状腿。在操作端38a处,两个手柄46a也从工具本体32a向外延伸。手柄46a允许使用者抓握工具本体32a、操纵工具本体32a和绕着主体轴线34a旋转工具本体32a。两个手柄46a、工具本体32a和工具止动部44a的两个腿的向外延伸尺寸都基本上位于与主体轴线34a共用的平面内,其中手术工具30a在被放置在平坦表面(未示出)上时保持基本上平坦。尽管可设想到手术工具30a在长度上通常为4至5英寸,但是可进一步设想到这将有很大差异并且最终取决于具体应用或手术环境。
48.图5b中描绘了手术工具30a的沿着图5a的线5b-5b截取的前视横截面图。如通过比较图5a和图5b可以最佳地理解到的,手术工具30a是中空的,包括基本上沿着主体轴线34a延伸的导孔48a,该导孔48a在螺纹40a的端头50a处的螺纹端36a处开口并且延伸到操作端38a,在手柄46a之间的位置处开口。如简要参考图6a中的手术工具30a的螺纹端36a的放大图可以最佳地理解到,将导孔48a定位在螺纹48a的端头50a处导致端头50a如图所示地略微变钝。
49.尽管本发明已经被示出和描述为包括钝螺纹端头,应理解,在本发明的预期范围内,其它端头构型也是可能的。例如,图6b描绘了与图6a的手术工具30a类似的具有工具本体32b、工具止动部44b和顺时针钻孔螺纹40b的预期手术工具的螺纹端36b的放大视图。然而,由于其是非中空的,图6b的手术工具没有导孔,并且因此在螺纹40b的底部处包括尖头50b,在一些应用中可以增强螺纹40b的骨钻孔能力。
50.再次参考图5a至图6a的实施例手术工具30a,导孔48a允许容纳定位引导件,该定位引导件是导丝52a。如图5a和图5b所示,由于导孔48a在螺纹48a的端头50a处以及在两个手柄46a之间都是开放的,因此手术工具30a允许导丝52a沿着主体轴线34a的整个长度完全延伸穿过手术工具30a。
51.为了更好地理解所描绘的根据本发明的手术工具30a的预期用途,图7至图10中描
绘了示例性最小切口拇囊炎矫正手术。执行图7至图10中所示和描述的手术的目的是实现上文关于图4a-c讨论的拇囊炎矫正。
52.参考图7,所描绘的脚10被示出为具有第一跖骨头26附近骨特征的放大54。采用最小切口技术的外科医生将在第一跖骨头26附近进行小皮肤切口(未示出)。随后定位引导件(在该示例中为导丝52a)被插入皮肤切口中,并且如图7所示用丝插入装置(未示出)从拇趾58的背面以大约45度角驱动到第一跖骨头20中。导丝52a通常为长度足够长以延伸手术工具30a的导孔48a的整个长度并且还允许附加的剩余长度用于进一步的引导操作的0.45mm直径的克氏针。尽管在该示例中示出和描述了线定位引导件,但应理解到,其它类型的定位引导件,诸如长销、杆、加强的绳、杆、销钉或允许工具对准的任何结构能够类似地用于本发明的预期范围。
53.将图7与图8相比较,定位引导件或导丝52a被穿过导孔48a插入。现在将图8与图9及其放大62进行比较,当手术工具36a被沿着导丝52a朝着脚10移动时,工具止动部44a的外形和减小的尺寸使得外科医生能够操控或“挑弄”手术工具36a进入切口和周围皮肤和肌肉(未示出)。如图9所示,丝插入第一跖骨头26的点限定了用于手术工具30a和螺纹40a的钻孔位置60。顺时针螺纹40a被定位成当绕着主体轴线34a沿向右的顺时针钻孔方向42a旋转时,允许手术工具30a钻孔到第一跖骨头中并且接合第一跖骨头。
54.参考图10及其插图64,手术工具30a及其顺时针方向的螺纹40a通过导丝52a以正确的方向对准,随着外科医生从操作端38a施加压力并且使用手柄46a沿顺时针钻孔方向42a旋转手术工具30a,手术工具30a及其顺时针方向的螺纹40a继续钻孔到第一跖骨头26的骨材料中。如插图64的骨剖面图66所示,随着手术工具30a继续沿顺时针钻孔方向42a旋转,螺纹40a与第一跖骨头26的骨材料形成越来越紧的螺纹接合。尽管所需的旋转量可以根据诸如螺纹密度和个体骨特征之类的若干因素而变化,但是通常可以需要至少三到四圈螺纹40a便可以完全旋转插入工具30a,以保持牢固地就位到跖骨头部26中。这种紧固接合持续,直到工具止动部44a的至少一个腿与第一跖骨头26接触以防止工具进一步旋转。一旦工具止动部44a接触骨材料,工具止动部44a就被定位成防止工具30a绕着主体轴线34a进一步旋转,从而防止进一步钻孔。
55.采用这种技术的外科医生接下来将在第一跖骨20的颈部处(骨干-干骺端连接处)进行切断横向切口或截骨术56。将图10与图1进行比较,截骨术产生了游离的头骨碎片,包括第一跖骨头26,其被侧向推动以进行横向面矫正。然而,为了使软骨与拇趾58的近节指骨正确对齐,通常仍然需要进行额状面矫正。
56.一旦在截骨术56处已从第一跖骨20的剩余部分切断游离头骨碎片/第一跖骨头26,则可通过进一步沿着向右的顺时针钻孔方向42a旋转手术工具30a来实现额状面矫正。截骨术56允许游离头骨碎片/第一跖骨头26独立于第一跖骨20的剩余部分移动。当手术工具30a被沿着向右的顺时针钻孔方向42a进一步旋转时,工具止动部44a防止进一步由工具30a钻孔,同时提供旋转杠杆。其结果是,钻孔螺纹40a与头骨碎片/第一跖骨头26的紧密的顺时针接合引起跖骨头部26的骨旋转68以及手术工具30a的顺时针旋转42a。尽管工具止动部44a阻止了螺纹40a的进一步钻孔,但是手术工具30a的顺时针旋转42a用于维持和拧紧螺纹40a和头骨碎片/第一跖骨头26之间的顺时针接合,进一步确保期望的工具-骨接合。
57.当手术工具30a被沿着向右的顺时针方向42a旋转时,所导致的头骨碎片/第一跖
骨头26的骨旋转68允许如图4c所示的沿着额状面进行期望的矫正骨重新定位。额状面矫正还允许籽骨24旋转回到正确的对准。这导致拇长屈肌腱(未示出)在手术矫正之后对拇趾58具有更直线的作用。钻孔螺纹40a与头骨碎片/第一跖骨头26的向右的顺时针旋转的紧密、顺时针接合还允许通过手术工具30a在额状面、矢状面或横向面中的任意面上固定线性移动头骨碎片。因此,手术工具30a允许在工具30a和骨紧密接合的同时对骨进行大量操纵、移动和旋转。
58.再次参考图7至图10,一旦已经完成额状面矫正和对头骨碎片/第一跖骨头26的任何其它操作,导丝52a可以通过截骨术56前进以保持矫正的相对定位,直到移除手术工具30a并且插入永久固定装置。一旦截骨术56被充分固定在其校正位置,就可以移除导丝52a。
59.尽管本发明已经被示出和描述为用于在人脚上进行拇囊炎矫正手术,但是可设想到本发明也可用于其它类型的手术和/或人类和动物身体的其它部位,只要需要紧密啮合以实现骨旋转或线性骨移动或位移。选择使用顺时针或逆时针螺纹的工具通常取决于预期的旋转需求。对于大多数应用,期望选择螺纹与预期旋转重新定位方向相匹配的工具。
60.例如,图11a描绘了本发明的类似于图5a和图5b的手术工具30a的手术工具30c的前视立体图。为了比较,在图11b中描绘了手术工具30c的沿着图11a的线11b-11b截取的前视横截面图。图11a和图11b的手术工具30c具有用于容纳导丝52c的导孔48c、细长工具本体32c和工具轴线34c,在操作端38c处具有手柄46c,并且在螺纹端36c处具有工具止动部44c。圆锥形逆时针钻孔螺纹70c在工具止动部70c下方沿着工具轴线34c延伸。当手术工具30c被沿着钻孔方向72c绕着工具轴线34c旋转时,逆时针螺纹70c允许手术工具30c用于向左的逆时针钻孔。这种构型将使手术工具30c适于在右脚上执行图7至图10所示的拇囊炎矫正手术。
61.尽管本发明已经使用诸如图5a和b以及7至图10中的导丝52a之类的定位引导件进行示出和描述,但是应理解到,徒手钻孔工具设计和手术技术也被包括在本发明的预期范围内,工具尺寸和特征的变化也是如此。例如,图12a和图12b描绘了本发明的手术工具30d,该手术工具30d没有导孔并且被优化以在没有导丝的情况下使用。工具本体32d沿工具轴线34d具有减小的周长,手柄46d也是如此。栓形腿在螺纹端36d处形成工具止动部44d。由于手术工具30d没有导孔,圆锥形逆时针钻孔螺纹70d终止于与图6b所示类似的尖头50d处。在图12a和图12b所示的实施例中,当进行手术工具30d的徒手旋转时,尖头50d可以有利于增强骨穿透。
62.还应理解到,即使工具本体具有减小的周长,一些预期的实施例仍可利用导孔和定位引导件。例如,图13a和图13b描绘了本发明的手术工具30e,其具有沿着工具轴线34e的导孔48e,用于容纳导丝52e,尽管工具本体32e的周长减小。圆锥形逆时针钻孔螺纹70e在工具止动部70c下方沿着工具轴线34c延伸,并且尽管工具本体32e的周长减小,但是允许导孔48e在端头50e处开放,以消除对手术工具30e的徒手定位和旋转的需要。
63.在本发明的预期范围内,工具止动部的其它变型也是可能的。例如,图14描绘了手术工具30f,其具有用于容纳导丝52f的导孔48f、细长的工具本体32f和工具轴线34f,在操作端38f处具有手柄46f,然而,在螺纹端36f处的工具止动部44f包括完全围绕主体轴线34f延伸的凸缘44f。
64.尽管本发明已经使用一种工具来示出和描述,其中手柄、工具本体和腿基本上都
位于一个共用平面内,但应理解到,本发明还可以包括其中这种元件占据不同平面的工具。例如,图15描绘了本发明的手术工具30g,其具有手柄46g、工具本体32g和工具止动部44g,其中两个手柄46g沿着这样的平面在操作端38g处从工具本体34g向外延伸,该平面与工具止动部44g的两条腿从螺纹端44g沿着其向外延伸的平面成大约90
°
。由于手柄46g和工具止动部44g各自与工具本体32g共用不同的平面,手术工具30g将不会平放在上面平坦的表面。在认为更难以从器械台上抓握或取回手术工具30g的应用或手术环境中,这种构型可以是合乎需要的。
65.手柄、工具止动部或工具本体形状和尺寸的其它变型也是可能的,并且在本发明的预期范围内。例如,图16描绘了本发明的手术工具30h,其具有从工具本体32h的操作端38h延伸的钉形导孔46h,该工具本体32h具有扩大的周长和导孔48h。工具止动部44h的从螺纹端36h延伸的腿也是沿着与工具本体32h和手柄46h相同的平面向外延伸的钉形中间部分。在类似于图7至图10中所示和描述的右脚拇囊炎矫正手术期间,工具本体32h的扩大周长将允许逆时针钻孔螺纹70h与产生第一跖骨头26的更大螺纹接合。
66.还应理解到,本发明可以在本发明的预期范围内在手术工具的操作端处结合手柄和/或旋钮的其它各种可选构型。例如,图17描绘了本发明的手术工具30i,其具有在操作端38i处绕着开槽手柄74的周边定位的手指凹槽72。在该构型中,手术工具30i的导孔48i沿着主体轴线34i延伸并且穿过开槽手柄74到达逆时针螺纹70i的端头50j。当外科医生绕着手术工具30i的主体轴线34i旋转工具30i及其逆时针螺纹701时,手指凹槽72便利单手操作手术工具30i。
67.图17的开槽手柄手术工具30i的一种变型是图18中描绘的手术工具30j,其具有圆顶形手柄76,该圆顶形手柄76包括绕着其外周的圆顶凹口78。手术工具30j还包括导孔48j,该导孔48j延伸穿过圆顶手柄76的顶部并沿着主体轴线34j穿过逆时针螺纹70j的端头50j。当外科医生绕着手术工具30i的主体轴线34j旋转工具30j及其逆时针螺纹70j时,手指凹槽72和圆顶手柄76还便利单手操作手术工具30j。
68.图17和图18的手术工具30i和30j在保持本发明的单手实用性同时减小从工具本体32i和32j向外延伸的尺寸方面具有潜在优势。在预期的发明范围内,具有类似优势的其它构型也是可能的。例如,图19描绘了本发明的手术工具30k,其具有带有四个直边82k的方形手柄80,以增强手术期间的单手操作,同时仍允许导孔48k延伸到工具本体32k中,并且手术工具30k的从工具本体32k向外延伸的尺寸也类似地减少。
69.在图20的手术工具30m中描绘了细微的变型,手术工具30m具有带有三个直边82m的三角形手柄84m。三个直边82m还允许单手操作,并且包括延伸到工具本体32m中并且通过工具30m的螺纹端36m处的逆时针螺纹70m的端头50m开口的导孔48m。
70.在图21的手术工具30n中描绘了进一步的变型,手术工具30n具有带粗糙外表面88的圆形手柄86。粗糙外表面88被粗糙化,以允许增强的工具操作,尽管外表面88是卷曲的形状。圆形手柄86还包括导孔48n,该导孔48n延伸到工具本体32n中,并且通过工具30n的螺纹端36n处的逆时针螺纹70n的端头500开口。
71.还可以使用双翼手柄构型来减小手术工具的尺寸,和/或将本发明的手术工具配置成允许使用外部工具或装置进行附加的操作。例如,图22描绘了本发明的手术工具30p,其具有位于操作端38p处的突出t形手柄90,并且具有从工具本体32p基本上沿着与工具本
体32p和工具止动部44p的腿共用的平面向外延伸的两个翼部91。突出t形手柄90还包括平坦的工具接合表面92,其能够使机器或外部工具与手术工具30p接合以进行附加的工具操作。突出t形手柄90还包括导孔48p,该导孔48p延伸到工具本体32p中,并且在工具30p的螺纹端36p处通过逆时针螺纹70p的端头50p开口。
72.进一步设想到,一些实施例可以结合延伸结构或多部件主体结构,尤其是在隐藏定位引导件的全部或一部分或者增加钻孔位置与手柄或其它操纵结构之间的距离会是有利的情况下。例如,图23a描绘了本发明的手术工具30q的前视图,该手术工具30q具有附接到工具本体32q的操作端38q的可拆卸延伸部94。图23b描绘了手术工具30q的分解横截面图。如通过比较图23a和图23b可以最佳地理解到的,延伸部94包括手柄46q和具有凸形延伸部螺纹98的延伸部本体96。凸形延伸部螺纹98在工具本体32q的操作端38q处被定位成拧到导孔48q的凹形操作螺纹100中。当延伸部94已经在工具本体32q的操作端38q处完全拧入就位时,延伸部本体96沿着主体轴线34c延伸。在这个位置,导孔48q还沿着主体轴线34c延伸,完全穿过延伸部本体96,在延伸部本体94的在手柄46q之间的顶部处开口。
73.如图23a和图23b所示,一定长度的导丝52q已经被选择并且完全延伸穿过工具本体32q,其中大部分暴露的丝延伸经过操作端38q并且从导孔52q伸出。在将导丝52q驱动到骨中之后并且当工具本体32q被定位在导丝52q本身之上时,这通常被认为是有利的。然而,在将逆时针螺纹70q旋转钻孔到骨中的过程中,通常会被认为是有问题的,因为随着工具30q的旋转,导丝52q可以会被视为对外科医生的阻碍。
74.进一步比较图23a和图23b,将延伸部94附接到工具本体32q的操作端38q并且附接在导丝52q的剩余暴露长度上,使得导丝52q的剩余暴露长度能够被完全容纳在工具本体32q和延伸部本体96的组合导孔48q内。在图23a和图23b的具体实施例中,延伸部94的凸形延伸部螺纹98和工具体32a的凹形操作螺纹100通常逆时针拧紧,以在外科医生围绕主体轴线34c旋转手术工具30q用逆时针螺纹70q钻孔到骨中时,允许螺纹98和100之间的接合收紧。然而,应理解,在其它设想的实施例中,类似的凸形延伸部螺纹和凹形操作螺纹将顺时针拧紧定位,以允许拧紧接合具有顺时针定位螺纹的工具。
75.还应理解到,在一些预期的实施例中,可以在手术工具上的不同位置处添加附加的附件,用于本发明的预期范围内的特定手术目的。例如,图24a和图24b描绘了本发明的手术工具30r,其具有定位在沿着工具本体32r的外表面的位置处的线环102。在图24a和图24b所示的实施例中,一个环102被定位在更靠近工具30r的操作端38r的一个位置处,并且另一个环102被定位成更靠近螺纹端36r。在该构型中,环102沿着由工具本体32r、手柄46r和工具止动部44r的腿共用的平面在相反的方向上从工具本体32r向外延伸。然而,应理解,其它数量的环和环定位也在本发明的预期范围内。
76.如图24a和图24b所示,环102在执行诸如图7至图10所示和描述的拇囊炎矫正手术之类的手术时将特别有用,其中环102允许导向附加丝线(未示出),以用于在切骨术56形成之后和在导丝52a和工具已经被用于完成骨重新定位之后,用于将切断的头骨碎片/跖骨头部26相对于第一跖骨20的其余部分保持在适当位置。因此,环将使附加丝线能够提供对矫正头骨碎片/跖骨头部26的临时固定。
77.还应理解,在本发明的预期范围内,还可以使用附加的工具和技术来执行骨手术技术。例如,在一些预期的手术方法中,可以在插入工具之前在导丝上使用钻头(未示出)。
在这种实施例中,将使用软组织保护器(未示出)。
78.现在参考图25a,本发明的另一种设想的外科手术技术将涉及使用角度工具104使导丝对准。角度工具104包括平坦底面106、成角度的顶面108和侧手柄110。成角度的顶面108与平坦底面106成45度角,并且包括在成角度的顶面108的顶部上并沿成角度的顶面108的长度延伸的中空线管112。线管112的尺寸被设计成容纳一定长度的克氏针,并且允许将克氏针定位在与平坦底面106成45度的位置。
79.图25b描绘了利用图25a的角度工具104的外科手术技术,该外科手术技术是图7至图10中描绘的用于左脚10的拇囊炎矫正外科手术技术的改型。参考图25b,描绘了具有围绕第一跖骨20、籽骨24和拇趾58的皮肤和非骨组织114的大脚趾甲113的侧视图。在第一跖骨头26附近形成小切口116。随后将角度工具104与其平坦底面106放置在拇趾58上,因此线管112被如图所示地相对于拇趾58和第一跖骨头26直接定向成45度。
80.一旦角度工具104处于如图25b所示的这个位置,通常为一段克氏针的导丝52s被送入导丝管112,然后被引导进入并穿过切口116直到它在钻孔位置60s处并以由角度工具104提供的正确45度角接近或接触第一跖骨头26。然后使用克氏针驱动器(未示出),同时导丝52s保持由角度工具104定位,以将导丝52s的端部如图所示地驱动到第一跖骨头26中。然后可以移除角度工具104,使导丝52s被保持在适当位置,然后使用本发明的诸如图5a和图5b的手术工具30a之类的工具来完成跖骨头部26的重新定位。
81.尽管图25a和图25b中描绘的外科手术技术描绘了使用角度工具以最佳地将导丝定位在与拇趾58和第一跖骨头26成45度的位置,但应理解到,在所描述的手术方法和角度工具的一些可设想实施例中,优选的丝线插入的最佳角度可以被预定为25-35度或在本发明的预期范围内使用适当成角度的工具的另一角度。
82.本领域技术人员应认识到,本发明能够具有与所示出和描述的那些不同的实施例。应理解,在不脱离本发明本身的情况下,能够以各种方式改变所公开的装置和方法的结构的细节。因此,附图和详细描述应被视为包括不脱离本发明的精神和范围的等同物。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1