生物测量系统、生物测量程序以及计算机可读非暂时性存储介质的制作方法
生物测量系统、生物测量程序以及计算机可读非暂时性存储介质
1.相关申请的相互参照
2.本技术主张于2019年8月2日向日本技术的专利申请号2019-142941的优先权,该申请的内容通过引用援引至此。
技术领域
3.本公开涉及一种用于对由对生物的物理刺激的介入产生的生物的反应进行测量的生物测量系统、生物测量程序以及记录有该程序的计算机可读非暂时性存储介质。
背景技术:
4.生物通过由ems(肌肉电刺激:electric muscle stimulation)装置等产生的物理性刺激(电刺激)来进行被动的肌肉收缩运动,或者通过向生物施以按摩等外部的物理刺激(力学刺激)而在生物内产生酸痛舒缓、血液流通变好等变化。此外,通过生物自己主动地运动,也会向肌肉施以物理刺激,由此也会在生物内产生变化。
5.已知一种蓄积如此向生物施以了物理刺激时的生物的变化,对长期的经时变化进行评价的系统。例如,日本特开2007-75586号公报公开了一种以过去的生物信息为基础反馈健康管理信息的健康管理系统。此外,例如,日本专利第3948617号公报公开了一种如下装置:对进行了针对负荷的运动时的被测者的肌肉的肌动图(mechanomyography)进行测量,根据测量到的肌动图的时间序列数据对被测者的测量部位所具备的肌肉的种类的比例进行判定。而且,例如,日本专利第4990719号公报公开了一种如下健康测量装置:根据重心摆动评价运动功能,同时利用bia(生物电阻测量法:bio-impedance analysis)实施体组成测量来综合评价生物活动功能。
技术实现要素:
6.在现有的系统或装置中,能对由过去的蓄积信息得到的比较长期的生物的经时变化进行评价,但无法对由对生物的物理刺激的介入产生的生物的即时反应进行测量。
7.因此,本公开的目的之一在于,提供一种能对由对生物的物理刺激的介入产生的生物的即时反应进行测量的生物测量系统。
8.本提案的一个方案的生物测量系统具有以下的构成。
9.(1)一种生物测量系统,能对生物施加肌肉电刺激,其中,所述生物测量系统具备:
10.生物电阻抗测量用电极,用于测量生物的生物电阻抗;以及
11.肌肉电刺激用电极,用于对生物施加肌肉电刺激,
12.所述生物电阻抗测量用电极和所述肌肉电刺激用电极配置为同时与生物接触。
13.(2)根据(1)所述的生物测量系统,其中,
14.所述生物电阻抗测量用电极和所述肌肉电刺激用电极相互隔离配置。
15.(3)根据(1)所述的生物测量系统,其中,
16.所述生物电阻抗测量用电极和所述肌肉电刺激用电极配置为同时与生物的脚掌接触。
17.(4)根据(1)~(3)中任一项所述的生物测量系统,其中,具备:
18.左部位用的多个所述生物电阻抗测量用电极;
19.右部位用的多个所述生物电阻抗测量用电极;
20.左部位用的至少一个所述肌肉电刺激用电极;以及
21.右部位用的至少一个所述肌肉电刺激用电极。
22.(5)根据(4)所述的生物测量系统,其中,具备:
23.左脚用的脚尖侧的所述生物电阻抗测量用电极;
24.左脚用的脚后跟侧的所述生物电阻抗测量用电极;
25.左脚用的脚心部的所述肌肉电刺激用电极;
26.右脚用的脚尖侧的所述生物电阻抗测量用电极;
27.右脚用的脚后跟侧的所述生物电阻抗测量用电极;以及
28.右脚用的脚心部的所述肌肉电刺激用电极。
29.(6)根据(5)所述的生物测量系统,其中,
30.所述肌肉电刺激用电极具有以与脚心的形状一致的形状突出的形状。
31.(7)根据(5)所述的生物测量系统,其中,
32.所述肌肉电刺激用电极突出并可压入。
33.(8)根据(4)所述的生物测量系统,其中,具备:
34.左脚用的脚尖侧的所述生物电阻抗测量用电极;
35.左脚用的脚后跟侧的所述生物电阻抗测量用电极;
36.左脚用的脚尖侧的所述肌肉电刺激用电极;
37.左脚用的脚后跟侧的所述肌肉电刺激用电极;
38.右脚用的脚尖侧的所述生物电阻抗测量用电极;
39.右脚用的脚后跟侧的所述生物电阻抗测量用电极;
40.右脚用的脚尖侧的所述肌肉电刺激用电极;以及
41.右脚用的脚后跟侧的所述肌肉电刺激用电极。
42.(9)根据(1)~(8)中任一项所述的生物测量系统,其中,
43.所述生物电阻抗测量用电极和所述肌肉电刺激用电极利用不同的原材料构成。
44.(10)根据(1)~(9)中任一项所述的生物测量系统,其中,
45.所述生物测量系统还具备输出部,所述输出部输出基于以与介入建立关联的方式利用所述生物电阻抗测量用电极而测量到的生物电阻抗的信息,所述介入由利用所述肌肉电刺激用电极而得的所述肌肉电刺激产生。
46.一个方案的生物测量系统具有具备如下部件的构成:介入确定部,确定对生物的物理刺激的介入的内容;生物测量部,测量所述生物的生物信息;以及输出部,输出以与由所述介入确定部确定的所述介入建立关联的方式由所述生物测量部测量到的所述生物信息或基于所述生物信息的信息。
47.一个方案的生物测量系统具有具备如下部件的构成:介入确定部,确定对生物的物理刺激的介入的内容;体组成运算部,对所述生物的体组成进行运算;以及存储部,以建
立关联的方式存储所述体组成和所述介入的内容。
附图说明
48.图1a是第一实施方式的生物测量系统(正面)的外观图。
49.图1b是第一实施方式的生物测量系统(背面)的外观图。
50.图2是表示将第一实施方式的生物测量系统装戴于作为生物的人类的身体上的状态的图。
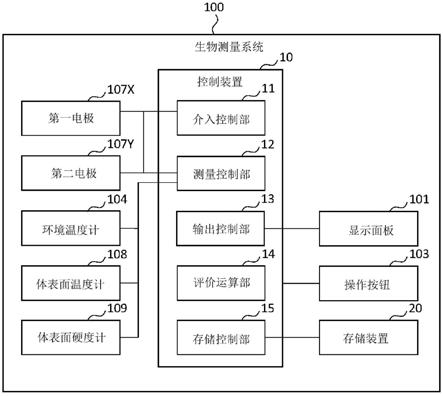
51.图3是表示第一实施方式的生物测量系统的构成的框图。
52.图4是表示第一实施方式的介入量与介入前后的生物电阻抗的变化之间的关系的图表。
53.图5是表示第一实施方式的显示面板的显示例的图。
54.图6是表示第一实施方式的生物的水分量的多少与生物电阻抗等之间的关系的表。
55.图7是表示第一实施方式的生物的水分量的变化与生物电阻抗等的变化之间的关系的表。
56.图8是表示第一实施方式的体组成值的记录的例子的图表。
57.图9是第一实施方式的生物测量系统中的生物测量方法的流程图。
58.图10是表示第一实施方式的变形例1的生物测量系统的图。
59.图11是表示第一实施方式的变形例1的生物测量系统的构成的框图。
60.图12是第二实施方式的生物测量系统的外观图。
61.图13是表示第二实施方式的电极配置的第一变形例的图。
62.图14是表示第二实施方式的电极配置的第二变形例的图。
63.图15是表示第二实施方式的电极配置的第三变形例的图。
64.图16是表示第二实施方式的电极配置的第四变形例的图。
65.图17是表示第二实施方式的电极配置的第五变形例的图。
具体实施方式
66.以下,参照附图,对本公开的实施方式进行说明。需要说明的是,以下说明的实施方式表示实施本发明的情况的一个例子,不限于以下对本发明进行说明的具体构成。在实施本发明时,可以适当采用与实施方式相应的具体构成。
67.(第一实施方式)
68.图1是第一实施方式的生物测量系统的外观图。生物测量系统100构成为一个垫状的装置。生物测量系统100在与生物的表面接触的状态下使用。图1a示出了使生物测量系统100与生物进行了接触时处于外侧的面(正面),图1b示出了生物测量系统100中的与生物接触的面(背面)。
69.图2是表示将生物测量系统装戴于作为生物的人类的身体上的状态的图。如图2所示,本实施方式的生物测量系统100设计为装戴于人体的腹部的装置。需要说明的是,生物测量系统100还可以具备用于在使该生物测量系统100与生物接触的状态下固定该生物测量系统100的腰带等固定辅助用具。
70.如图1a所示,生物测量系统100在正面具备显示面板101、开始按钮102、四个操作按钮103a~103d(以下,统称时称为“操作按钮103”。)以及环境温度计104。此外,如图1b所示,生物测量系统100具备四个电极107a~107d(以下,统称时称为“电极107”。)、体表面温度计108以及体表面硬度计109。显示面板101相当于输出部。
71.生物测量系统100具有作为介入装置(具体而言,ems装置)的功能,并且具有作为生物测量装置(具体而言,四电极式bi(生物电阻抗:bioelectrical impedance)体组成计)的功能,所述介入装置经由电极107向生物施以电刺激(以下,也称为“肌肉电刺激”。)来使生物的肌肉反射收缩,由此使生物进行被动运动,所述生物测量装置利用相同电极107并经由电极107收发微弱的电流,由此测量生物的生物电阻抗。需要说明的是,由肌肉电刺激产生的被动运动和基于bi法的体组成测量由于无法同时进行,因此以相互错开时间的方式进行。
72.图3是表示生物测量系统的构成的框图。如图3所示,生物测量系统100具备第一电极107x、第二电极107y、环境温度计104、体表面温度计108、体表面硬度计109、控制装置10、显示面板101、操作按钮103以及存储装置20。在本实施方式中,图1的电极107a、107c相当于第一电极107x,电极107b、107d相当于第二电极107y。当生物测量系统100作为体组成计而发挥功能时,第一电极107x作为通电用电极而发挥功能,当生物测量系统100作为体组成计而发挥功能时,第二电极107y作为测量用电极而发挥功能。
73.控制装置10具备介入控制部11、测量控制部12、输出控制部13、评价运算部14以及存储控制部15。控制装置10可以通过使通用的处理器执行规定的计算机程序来实现,或者也可以由专用的电路构成。计算机程序可以由非暂时性记录介质、通信从外部提供而存储于生物测量系统100,也可以预先存储于生物测量系统100。
74.介入控制部11进行用于使生物测量系统100作为ems装置而发挥功能的控制。具体而言,介入控制部11以按照介入程序以规定的类型和强度向生物施以电刺激的方式控制第一电极107x和第二电极107y,由此使生物进行被动运动。
75.此外,测量控制部12进行用于使生物测量系统100作为体组成计而发挥功能的控制,获取生物的生物信息。具体而言,测量控制部12使高频和低频的微弱的交流电流从第一电极107x流过生物,并且测量在第二电极107y接收到的电流,由此测量生物电阻抗作为生物信息。此外,例如利用操作按钮103向测量控制部12给予用户的身高、体重、年龄、性别等生物信息,与利用第一电极107x和第二电极107y而测量到的生物电阻抗相结合,由此求出用户的体脂肪率、肌肉量、水分量等体组成。需要说明的是,也可以通过使测量控制部12读出预先存储的用户的身高、体重、年龄、性别等生物信息来向测量控制部12给与这些生物信息。
76.测量控制部12以与由介入控制部11产生的介入建立关联的方式,控制第一电极107x和第二电极107y来获取生物电阻抗作为生物信息,此外,以与由介入控制部11产生的介入建立关联的方式,控制体表面温度计108和体表面硬度计109来获取体表面温度和体表面硬度作为生物信息。而且,测量控制部12以与由介入控制部11产生的介入建立关联的方式,控制环境温度计104来获取环境温度作为环境信息。
77.在介入控制部11存储有多种介入程序。介入程序是按照预先确定的顺序依次执行多种电刺激的类型的流程。介入控制部11在确定了介入内容后进行介入。介入控制部11在
介入内容确定前基于由测量控制部12测量到的生物信息和环境信息,介入控制部11自动地确定介入程序(介入程序自动确定模式)。
78.在介入程序自动确定模式中,用户能设定目标。具体而言,用户能指定体组成中的任意一个项目作为目标项目并设定该目标项目的目标值。此外,在该目标设定中,也能设定目标的达成期限或着距离目标达成的目标天数。在介入程序自动确定模式中,在设定了目标的情况下,介入控制部11基于设定的目标以在目标的达成期限内从现在的体组成值达到目标值的方式确定介入程序。
79.需要说明的是,在介入程序自动确定模式中,在未设定目标的情况下,也能基于测量到的生物信息来自动地确定介入程序。例如,介入控制部11可以将由生物测量部12测量到的体组成的各项目与标准值进行比较,以相对于标准值的偏离大的项目接近标准值的方式确定介入程序。
80.此外,在用户操作操作按钮103而指定了介入内容的情况下,介入控制部11按照该指定来确定介入内容。在用户指定介入内容的情况下,用户能选择指定任意一个介入程序(介入程序指定模式),或者能选择指定多个准备好的电刺激的类型中的任意一个(类型指定模式)。无论在何种模式下,用户都能指定电刺激的强度和持续时间。需要说明的是,在介入程序自动确定模式中,也可以自动地设定强度、持续时间。
81.介入控制部11基于输入的身高、体重、年龄、性别等生物信息、体组成、来自用户的输入来确定肌肉电刺激的内容。例如,即使施加了相同电流的情况下,每单位量的刺激根据肌肉量而不同,因此介入控制部11设定对肌肉量进行了考虑的刺激。此外,当皮下脂肪量多时,接触阻抗变大,容易感觉到刺激,因此介入控制部11根据皮下脂肪量来调整输入信号。
82.输出控制部13设为用于在显示面板101确定介入内容的引导显示。当用户操作操作按钮103而选择了某一个模式时,介入控制部11自动地或者按照用户的操作确定介入内容。当用户操作操作按钮103而进行了开始指示时,介入控制部11开始肌肉电刺激的介入。
83.在介入控制部11开始介入前,测量控制部12进行生物电阻抗的测量。此时测量到的生物电阻抗为介入开始前的生物电阻抗,将其称为“介入前生物电阻抗”。此外,测量控制部12在介入中的规定定时,即不进行用于被动运动的肌肉电刺激的施加的定时也进行生物电阻抗的测量。该生物电阻抗为介入中途的生物电阻抗,将其称为“中途生物电阻抗”。而且,测量控制部12在介入程序结束了的定时也测量生物电阻抗。该生物电阻抗为介入结束后的生物电阻抗,将其称为“介入后生物电阻抗”。
84.测量控制部12同样地在介入前、介入中的规定定时(例如,测量生物电阻抗的定时)以及介入后控制环境温度计104、体表面温度计108以及体表面硬度计109来分别测量环境温度、体表面温度以及体表面硬度。需要说明的是,也可以是,环境温度的测量仅在介入前进行。将介入前、介入中途以及介入后的生物电阻抗、体表面温度、体表面硬度等生物信息分别称为“介入前生物信息”、“中途生物信息”、“介入后生物信息”。
85.评价运算部14基于由介入控制部11进行的介入程序的运行和在与之相应的定时下进行的生物信息的测量的结果,对生物的评价进行运算。评价运算部14可以直接输出测量到的生物信息作为生物的评价,或者也可以以可评价的方式对测量到的生物信息进行视觉化(例如,图表化),也可以基于生物信息进行规定的运算来计算出与生物信息本身不同的评价值。输出控制部13将由评价运算部14得到的评价结果显示于显示面板101。
86.图4是表示介入量与介入前后的生物电阻抗的变化之间的关系的图表。需要说明的是,在本实施方式中,介入量被定义为通过介入时间对肌肉电刺激的强度进行积分而得到的量,但也可以采用其他定义。如图4的图表所示,在介入量比较小的情况下,当介入量增加时,生物电阻抗的变化(介入前生物电阻抗-介入后生物电阻抗)向负方向变大。该结论表示当介入量增加时,作为生物的反应,进行了介入的部位的水分量下降,这可评价为浮肿正在消除。此外,当介入量为一定量以上时,随着介入量增加,生物电阻抗向正方向变大。这可评价为浮肿已消除(由浮肿的消除产生的水分量的下降消失),出现了由介入产生的血流量的增加。
87.如此,能通过生物电阻抗的变化来评价生物的反应,但如果进一步考虑体组成、体表面温度、体表面硬度,则能更准确地推定生物的反应。在上述的例子中,能通过生物电阻抗的变化来推定并评价浮肿的消除、血流量的增加,但如果进一步考虑体表面温度和/或体表面硬度,则能更准确地分开推定浮肿的消除和血流量的增加。
88.因此,评价运算部14还考虑由体表面温度计108测量到的体温来对由浮肿的消除产生的水分量的变化和由血流量的增加产生的水分量的变化进行区分。即,在体表面温度的变化比较小的情况下,能评价为观察不到血流的增加,浮肿正在消除,在体表面温度正在上升的情况下,能评价为血流正在增加。因此,通过同时考虑水分量的变化和体表面温度的变化,能判断水分量的变化是由浮肿的消除产生的还是由血流量的增加产生的,抑或双方都产生了。
89.此外,随着肌肉量变多,对肌肉电刺激的灵敏度变低。因此,具有如下趋势:肌肉量越多,则从浮肿的消除状态转变为血流量增加的状态所需的介入量越多。因此,评价运算部14还考虑体组成值(具体而言,肌肉量)来对由浮肿的消除产生的水分量的变化和由血流量的增加产生的水分量的变化进行区分。即,在肌肉量比较多的情况下,评价运算部14将从浮肿的消除状态转变为血流量增加的状态的介入量设定得比较大,判断得到的生物电阻抗变化是处于浮肿的消除状态还是处于血流量增加的状态。
90.评价运算部14基于测量到的介入前后的生物电阻抗、体表面温度的变化以及体组成值来进行“浮肿正在消除”、“血流量正在增加”等评价。输出控制部13利用文字信息将该评价结果显示于显示面板101。由此,用户能得到“浮肿正在消除”、“血流量正在增加”等信息作为生物对介入的反应。
91.需要说明的是,在运行了介入程序并且测量了中途生物电阻抗的情况下,根据介入程序的运行,从介入前生物电阻抗到中途生物电阻抗的变化与图4所示的图表相同地进行变化。因此,在介入程序运行期间,评价运算部14可以随时评价生物的反应,输出控制部13可以实时显示评价结果。在该情况下,根据介入程序的运行,在显示面板101实时显示“浮肿正在消除”、“浮肿已消除”、“血流量正在增加”等生物的反应。
92.图5是表示显示面板的显示例的图。在图5的例子中,评价运算部14评价浮肿消除的程度和血流增加的程度。当正在进行介入时,输出控制部13以与介入程序的运行程度(介入量)建立关联的方式并以指示器的形式将由评价运算部14评价而得的浮肿消除的程度和血流增加的程度显示于显示面板101作为中途生物信息。
93.图6是表示生物的水分量的多少与生物电阻抗等之间的关系的表。如图6所示,在生物的水分量多的情况下,生物电阻抗变低,电抗/电阻之比(x/r)的绝对值变高,高频阻
抗/低频阻抗之比变低。另一方面,在生物的水分量少的情况下,生物电阻抗变高,电抗/电阻之比(x/r)的绝对值变低,高频阻抗/低频阻抗之比变高。
94.因此,评价运算部14基于生物电阻抗、电抗/电阻之比(x/r)的绝对值以及高频阻抗/低频阻抗之比并按照图6的表来推定生物的水分量。
95.图7是表示生物的水分量的变化与生物电阻抗等的变化之间的关系的表。如图7所示,当生物的水分量增加时,生物电阻抗增加,电抗/电阻之比(x/r)的绝对值减少,高频阻抗/低频阻抗之比增加。另一方面,当生物的水分量减少时,生物电阻抗减少,电抗/电阻之比(x/r)的绝对值增加,高频阻抗/低频阻抗之比减少。
96.因此,评价运算部14基于生物电阻抗、电抗/电阻之比(x/r)的绝对值、高频阻抗/低频阻抗之比的变化(增减)并按照图7的表来推定生物的水分量的变化(增减)。
97.介入控制部11在正以介入程序自动确定模式进行介入并且正在测量中途生物电阻抗的情况下,根据中途生物电阻抗的测量结果来动态地改变之后的介入内容。例如,介入控制部11也可以在中途生物电阻抗到达了规定的状态时结束介入。此外,例如,介入控制部11也可以在观察不到中途生物电阻抗的显著的变化的情况下加强肌肉电刺激的强度。或者,介入控制部11也可以根据中途生物电阻抗来确定之后的肌肉电刺激的类型。
98.需要说明的是,在介入程序指定模式、类型指定模式下,介入控制部11也可以同样地基于中途生物电阻抗来改变之后的介入内容。此时,介入控制部11也可以设为基于中途生物电阻抗来动态地改变肌肉电刺激的强度和持续时间。
99.图8是表示体组成值的记录的例子的图表。如上所述,生物测量系统100能通过以与介入建立关联的方式评价介入前的生物信息和介入中途或介入后的生物信息来得到生物对介入的即时反应,即得到由介入产生的生物电阻抗、体表面温度、体表面硬度等的即时变化或者基于这样的变化的介入的即时效果。另一方面,通过长时间(例如,数周至数月)地反复进行介入,生物的体组成(例如,肌肉量、体脂肪率等)会逐渐发生变化。
100.因此,在生物测量系统100中,每当介入控制部11进行介入时,存储控制部15将进行了该介入时的体组成值和该介入的介入内容或介入量存储于存储装置20。在存储装置20蓄积过去的介入时的介入量和体组成值。图8用条形图示出了介入量的累积值的同时,并且用折线图示出了作为体组成值的一个项目的体脂肪率。在图8的例子中,示出了当介入量的累积值增加时,体脂肪率减少。输出控制部13通过数值、图表将图8所示的、由介入产生的生物信息的逐渐的变化显示于显示面板13。
101.图9是生物测量系统中的生物测量方法的流程图。首先,在开始介入前,测量控制部12利用电极107、体表面温度计107、体表面硬度计108来测量介入前生物信息,即测量介入开始前的生物电阻抗、体表面温度、体表面硬度(步骤s91)。此外,此时,测量控制部12还利用环境温度计104来测量环境温度。
102.用户通过操作操作按钮103来设定目标和模式(步骤s92)。用户操作操作按钮103来设定体组成的项目、体组成值、目标达成期限作为目标。此外,用户选择上述的介入程序自动设定模式、介入程序指定模式、类型指定模式中的任意一个作为模式。
103.介入控制部11根据由用户进行的模式的设定来确定介入内容(步骤s93)。在用户设定了介入程序自动确定模式的情况下,介入控制装置11基于用户的体组成和目标来确定介入程序及其强度。此外,在用户设定了介入程序指定模式的情况下,介入控制部11将由用
户指定的介入程序和强度确定为介入内容。此外,在用户设定了类型指定模式的情况下,介入控制部11将由用户指定的类型和强度确定为介入内容。此外,此时,用户还设定介入的时间。
104.介入控制部11响应于开始按钮102的操作来开始介入(步骤s94)。介入控制部11在介入中途暂时停止介入,在这期间,生物测量部12测量途生物信息(步骤s95)。
105.介入控制部11判断是否结束介入(步骤s96)。介入控制部11在根据中途测量到的生物信息结束介入的情况下,在评价运算部14评价为根据中途的生物信息得到了期望的效果时结束介入。或者,介入控制部11在经过了设定的时间时结束介入。
106.当不结束介入时(在步骤s96为否),介入控制部11根据中途生物电阻抗等调整介入内容(步骤s97)并继续介入(步骤s94)。当介入控制部11结束介入时(在步骤s96为是),生物测量部12测量介入后的生物信息(步骤s98)。
107.评价运算部14对介入前的生物信息到介入后的生物信息的变化进行评价(步骤s99)。此时,输出控制部13将由评价运算部14得到的评价的结果显示于显示面板103,存储控制部15将由评价运算部14得到的评价与由生物测量部12测量到的体组成值一起存储于存储装置20。
108.如上所述,根据本实施方式的生物测量系统100,通过使肌肉电刺激介入来使生物进行被动运动并且测量生物信息,由此对由被动运动产生的生物信息的变化进行评价,因此能知道由被动运动产生的生物的即时反应。此外,通过在被动运动的中途测量生物信息,能在被动运动中实时知道生物的反应,能对之后的肌肉电刺激的介入的内容进行动态调整。
109.(变形例1)
110.图10是表示变形例1的生物测量系统的图。在上述的实施方式中,生物测量系统100构成为一个垫状的装置,但在本变形例中,生物测量系统50具备作为介入装置的多个ems装置51、作为生物测量装置的体组成计52、作为控制措置的信息终端装置53(例如,智能手机、平板pc)以及存储装置54。
111.多个ems装置51以分别装配于人体的腹部、双臂、双腿的方式使用。也就是说,多个音ems装置51用于人体的多个介入部位。体组成计52是上表面具备四个电极的平板上的装置。四个电极设为:通过人站在体组成计52上,左右的各脚掌分别与两个电极接触。信息终端装置53具有与ems装置51、体组成计52、信息终端装置53以及存储装置54通过无线或优先进行通信的功能。存储装置54设于通信网络上,通过与信息终端装置53进行网络通信来进行信息的收发。
112.图11是表示变形例1的生物测量系统的构成的框图。ems装置51具备电极511、环境温度计512、体表面温度计513、体表面硬度计514、控制装置515以及通信部516。控制装置515具备介入控制部5151和测量控制部5152。电极511向生物施以肌肉电刺激。环境温度计512、体表面温度计513以及体表面硬度计514是与上述的实施方式的环境温度计104、体表面温度计108以及体表面硬度计109相同的构成。
113.介入控制部5151通过控制电极511来控制由对介入部位的肌肉电刺激产生的介入。测量控制部分别控制环境温度计104、体表面温度计108以及体表面硬度计109来测量环境温度、体表面温度以及体表面硬度。通信部516是与信息终端装置53进行近距离的无线通
信的通信模块。
114.体组成计52是具备包括两个通电用电极521和两个测量用电极522的四个电极的四电极方式的bi测量仪。体组成计52除了具备通电用电极521和测量用电极522,还具备测量控制部523和通信部524。测量控制部523控制通电用电极521来使微弱的电流流过生物,通过利用测量用电极522测量电流来测量生物电阻抗。通信部524是与信息终端装置53进行近距离的无线通信的通信模块。
115.信息终端装置53具备触摸面板531、控制部532以及通信部533。触摸面板531显示信息并且接受由用户进行的触摸输入。控制部532按照规定的os(操作系统:operatingsystem)进行工作,通过执行在该os上工作的应用程序来进行各种运算。通信部533具备与ems装置51、体组成计52进行近距离无线通信的功能和经由路由器与通信网络内的存储装置54进行通信的功能。触摸面板531相当于将上述的实施方式的显示面板101和操作按钮103结合而成的设备。
116.在上述的实施方式中,将ems装置中用于向生物施以电刺激的电极和体组成计中用于使电在生物中流通而进行测量的电极设为共同的电极,但在本变形例中,ems装置51和体组成计52分别具备电极。此外,信息终端装置53通过使控制部532执行应用程序,根据用户向触摸面板531的输入,经由通信部533和通信部516控制ems装置51的介入控制部5151和测量控制部5152,经由通信部533和通信部524控制体组成计52的测量控制部523。
117.通过信息终端装置53执行应用程序,控制部532作为上述的实施方式的输出控制部13、评价运算部14以及存储控制部15而发挥功能。在本变形例的生物测量系统50中,相当于显示面板101的触摸面板531构成为与和身体接触的ems装置51、体组成计52分开的装置,因此能容易地通过视觉对进行介入中途的实时的生物的反应进行确认。
118.在本实施方式的生物测量系统50中,由于多个ems装置51装配于人体的各部位,因此除了上述的实施方式,还进行如下所述的控制。即,信息终端装置53的控制部532基于在执行介入程序中途测量到的生物信息,按照每个ems装置51(即,按照每个介入部位)进行控制。例如,控制部532可以基于进行介入中途的生物信息来确定介入部位。即,控制部532基于测量到的生物信息,按照每个ems装置51确定包括介入的开始和结束的介入内容。由此,能进行如下控制:基于生物信息,按照每个介入部位动态地改变介入内容。
119.需要说明的是,在本变形例中,将作为介入装置的ems装置51和作为生物测量装置的体组成计52设为分开的装置,生物信息的测量全部由体组成计52进行,但也可以是,除了体组成计52,ems装置51也进行生物信息(例如,生物电阻抗、体表面温度、体表面硬度)的测量。
120.(变形例2)
121.在上述的实施方式中,对生物的介入是指施以使生物进行肌肉的反射收缩运动的电刺激,但对生物的介入不限于此。对生物的介入也可以是例如向生物施以热刺激、力学刺激、光学刺激、电刺激、化学刺激或等离子体刺激的方式。此外,介入的目的除了是如上述的实施方式所述的锻炼,也可以是治疗、按摩、放松、康复等。
122.在变形例2的生物测量系统中,介入装置为按摩器,所述按摩器向生物施以力学刺激作为对生物的物理刺激的介入来进行按摩。该按摩器以装戴于作为生物的人体的方式使用,具备空气嚢。按摩器通过将空气送入至空气嚢来对所装戴的人体部位进行按压,通过从
空气嚢排出空气来解除按压。此外,按摩器也可以通过利用马达等动力源使对体表面进行按压、敲捶、摩擦等的构件进行工作来进行按摩。按摩器通过反复进行这样的按压等按摩动作来进行按摩的介入。关于准备好介入程序并按照介入程序执行各种按摩动作这一点、准备好各种模式这一点、能调整强度这一点等,与上述的实施方式的ems装置相同。
123.在控制部532存储有体组成值。控制部532基于体组成值中的皮下脂肪量和肌肉量来推定通常的体表面的硬度。测量控制部5152利用体表面硬度计514来测量实时的生物的体表面的硬度。当生物出现酸痛时,肌肉僵硬,体表面变硬。然后,通过进行按摩,酸痛舒缓,体表面的硬度下降。
124.因此,控制部532基于根据体组成值而推定到的体表面的硬度、介入前的体表面的硬度以及介入后或介入中途的体表面的硬度来评价酸痛(疲劳)。控制部532例如基于从介入前的体表面的硬度到介入后或介入中途的体表面的硬度的变化,评价为生物的酸痛正在舒缓中,此外,当介入后或介入中途的体表面的硬度与根据体组成而推定到的通常的表面的硬度接近时,评价为生物的酸痛已消除。
125.此时,控制部532也可以考虑由体表面温度计513测量到的体表面、由体组成计52测量到的生物电阻抗来评价为生物的酸痛正在舒缓中或者酸痛已消除。即,通过有效地进行按摩,体温上升,血液流通变好,由此生物电阻抗也发生变化。因此,控制部532也可以考虑这些生物信息来评价酸痛的舒缓、消除作为按摩的效果。
126.(变形例3)
127.在介入程序,特别是锻炼的介入程序中,有时也会在中途休息。例如,有时在进行了10分钟左右的被动运动后,休息数分钟,再进行10分钟左右的被动运动。因此,可以在休息期间以规定的时间间隔(例如30秒间隔)反复测量生物信息。并且,可以设为基于测量到的生物信息来评价生物的疲劳是否恢复,在疲劳已恢复时,开始下一组被动运动。进行这样的控制的控制部相当于介入开始确定部。
128.(变形例4)
129.在上述的实施方式及其变形例中,在利用介入装置进行了介入后,进行了生物信息的测量。特别是,在上述的实施方式中,作为介入装置的ems装置使生物进行了被动运动。在本变形例中,生物测量系统不具备介入装置,通过向用户提示介入内容来使用户进行主动运动。如此,用户按照自己的意思向肌肉施以负荷也是对肌肉的物理刺激的介入。
130.本变形例的生物测量系统确定介入内容,通过将介入内容显示于显示面板、触摸面板来向用户通知确定的介入内容。此时,生物测量系统在进行作为介入内容的主动运动的引导的同时,还进行利用体组成计的测量的引导。用户按照显示的介入内容进行主动运动和测量。具体而言,用户按照引导在主动运动之前进行介入前的生物信息的测量,然后进行主动运动,当引导的内容和量的主动运动结束时,进行介入后的生物信息的测量。在能以可测量生物信息的状态进行主动运动的情况下,也可以在主动运动的中途测量生物信息。
131.评价运算部基于向用户提示的主动运动、介入前的生物信息、介入中途或介入后的生物信息来对由主动运动产生的生物的反应进行评价。并且,以与介入建立关联的方式给用户提示评价结果,将该评价结果存储于存储装置。此外,在介入中途测量生物信息的情况下,也可以根据生物信息来调整之后的主动运动的内容并向用户提示。
132.本变形例中的介入不限于运动,也可以是通过他人向生物施以刺激的他动运动、
按摩等。
133.(第二实施方式)
134.在第一实施方式中,作为生物测量系统100的垫状的装置兼备作为介入装置(腿部ems)的功能和作为生物测量装置的功能,将相同电极107兼用为用于向生物施以肌肉电刺激的介入装置的电极以及生物测量装置的通电用和测量用的电极。此外,日本专利第6367510公开了一种利用电刺激装置的电极来进行体组成、皮肤水分等的测量的肌肉电刺激装置。
135.然而,由于适合于肌肉电刺激的施加的电极的原材料和适合于生物电阻抗的测量的电极的原材料不同,因此也可以分开设置两个电极。
136.此时,例如,可以是作为肌肉电刺激用电极,选择即使接触阻抗比较大也能进行恰当的电刺激的施加的原材料,作为生物电阻抗测量用电极,选择即使接触阻抗比较小也能进行准确的测量的原材料。此外,肌肉电刺激用电极的数量和生物电阻抗测量用电极的数量也可以不同。即,肌肉电刺激用电极有两个便足够,但为了进行四电极bi法的测量,生物电阻抗测量用电极可以设为四个。此外,肌肉电刺激用电极的数量也可以多于两个,生物电阻抗测量用电极也可以多于四个。
137.因此,在本实施方式中,将肌肉电刺激用电极和生物电阻抗测量用电极设为分开的电极。由此,能采用适合于各个电极的原材料。此外,当利用适合于电刺激的介入的原材料的电极来进行生物测量时,能避免接触阻抗过大而无法进行准确的测量这样的不良情况。而且,当利用适合于生物测量的原材料的电极来施加电刺激时,能避免在生物内产生必要以上的刺激而使用者感到疼痛这样的不良情况。
138.以下,参照附图,对本实施方式的生物测量系统进行了说明,但在以下的说明中,主要对肌肉电刺激用电极和生物电阻抗测量用电极进行说明。关于生物测量系统的其他构成,可以应用第一实施方式。
139.图12是本实施方式的生物测量系统的外观图。生物测量系统210设为板状的形状,通过载置双脚并使两个脚掌与该生物测量系统210接触来进行电刺激的介入和生物电阻抗的测量。生物电阻抗测量用电极和肌肉电刺激用电极配置为用户无需改变姿势就能接受生物测量和肌肉电刺激的介入。此外,用户无论是站着还是坐着都能进行电刺激的介入和生物电阻抗的测量。此外,生物电阻抗测量用电极与肌肉电刺激用电极相互隔离,但配置为能同时与生物的相同部位(在本实施方式中为脚掌)接触。
140.生物测量系统210的上表面具备分别与左脚掌的前方(脚趾根部分)和后方(脚后跟部分)以及右脚掌的前方(脚趾根部分)和后方(脚后跟部分)接触的左通电用电极217a、左测量用电极217b、右通电用电极217c、右测量用电极217d作为生物电阻抗测量用电极。在上表面的左脚掌的中央(脚心部分)和右脚掌的中央(脚心部分)分别具备左肌肉电刺激用电极217e和右肌肉电刺激用电极217f。如此,生物电阻抗测量用电极217a~217d和肌肉电刺激用电极217e、217f相互邻接设置。
141.左肌肉电刺激用电极217e和右肌肉电刺激用电极217f也可以设为分别比生物电阻抗测量用电极217a~217d向上方例如突出3~50mm左右。此时,左肌肉电刺激用电极217e和右肌肉电刺激用电极217f也可以设为以与脚心的形状一致的形状突出的形状。或者,也可以在左肌肉电刺激用电极217e和右肌肉电刺激用电极217f设置弹簧等阻尼器构件而能
压入。通过这些构成,能恰当地使左肌肉电刺激用电极217e和右肌肉电刺激用电极217f与脚掌的脚心部分贴合来适当地向生物施以电刺激。
142.关于生物电阻抗测量用电极和肌肉电刺激用电极中的任意一个,能通过使用确认导通的系统来确认电极与生物(脚掌)的接触状态。作为这样的系统,例如可以采用如下系统:利用生物电阻抗中的电阻和电抗来计算出测量数据的cole圆(柯尔圆),基于相对于正常的cole圆的偏移量来判定生物阻抗的测量有无异常(例如,参照日本特开2019-84156号公报)。此外,作为这样的系统,也可以采用基于生物电阻抗的时间序列数据来判定测量异常的原因、种类的系统。
143.也可以通过肌肉电刺激用电极和生物电阻抗测量用电极来分开设置用于控制、测量的电路。或者,也可以使电路共通,根据状况使六个电极分别在肌肉电刺激用与生物测量用之间进行切换而使用。
144.需要说明的是,在上述的实施方式中,对利用电极的电刺激的介入和电阻抗测量进行了说明,但身高计、体重计也可以附属于生物测量系统210。例如,为了坐着时使脚容易放置,腿部ems有时也相对于地板倾斜设置,但在该情况下,能内置不妨碍基于腿部ems的腿的动作的程度的力的弹簧、阻尼器,能以自然站着时四个点(最少三个点)与生物测量系统210的上表面接触的方式放倒,用于体重测量。
145.此外,在上述的实施方式中,将生物电阻抗测量用电极和肌肉电刺激用电极靠近配置,但也可以在内部利用滑动机构、旋转机构在生物电阻抗测量用电极与肌肉电刺激用电极之间进行更换来将两种电极配置于相同位置。
146.此外,在上述的实施方式中,对使电极与脚掌接触的生物测量系统进行了说明,但也可以是例如使手等其他部位与电极接触的系统。
147.此外,参照图12,在上述的实施方式中,对分开设有生物电阻抗测量用电极和肌肉电刺激用电极的生物测量系统进行了说明,但分开设置生物电阻抗测量用电极和肌肉电刺激用电极的例子不限于图12的方案。以下,对生物电阻抗测量用电极和肌肉电刺激用电极的配置的变形例进行说明。
148.在以下的变形例中,电极配置于上表面的左上方(对应于左脚脚尖侧)、右上方(对应于右脚脚尖侧)、左下方(对应于左脚脚后跟侧)、右下方(对应于右脚脚后跟侧)这四处的任一处。由于脚的脚心的部分略微凹陷,与此相对脚尖侧和脚后跟侧在站着时和坐着时均可靠地接地,因此通过在这四处中的任一处配置电极,确保了生物与电极的可靠的接触。
149.图13是表示电极配置的第一变形例的图。在第一变形例的生物测量系统220中,在左上位置和右上位置处,在外侧配置有生物电阻抗测量用电极227a、227c,在内侧配置有肌肉电刺激用电极227e、227f。在左下位置和右下位置分别配置有生物电阻抗测量用电极227b、227d。
150.图14是表示电极配置的第二变形例的图。在第二变形例的生物测量系统230中,分别在左上位置、右上位置、左下位置、右下位置处,在上侧(脚尖侧)配置有生物电阻抗测量用电极237a、237c、237b、237d,在下侧(脚后跟侧)配置有肌肉电刺激用电极237e、237f、237g、237h。在本例中,生物电阻抗测量用电极的前后之间的距离和肌肉电刺激用电极的前后之间的距离相同,因此,即使是脚小的人,也能通过在生物测量时和电刺激的介入时改变脚的位置来使四个电极可靠地与脚接触。
151.图15是表示电极配置的第三变形例的图。在第三变形例的生物测量系统240中,分别在左上位置、右上位置、左下位置、右下位置处,在上下方向上的内侧配置有肌肉电刺激用电极247e、247f、247g、247h,在上下方向上的外侧配置有生物电阻抗测量用电极247a、247c、247b、247d。在本例中,生物电阻抗测量用电极在前后方向上距离得足够远,能提高生物测量的精度。
152.图16是表示电极配置的第四变形例的图。在第四变形例的生物测量系统250中,分别在左上位置、右上位置、左下位置、右下位置处,在左右方向上的内侧配置有生物电阻抗测量用电极257a、257c、257b、257d,在左右方向上的外侧配置有肌肉电刺激用电极257e、257f、257g、257h。在本例中,由于在左右方向上配置有生物电阻抗测量用电极和肌肉电刺激用电极,因此与图12~图15所示的例子相比,能配置在前后方向上长的生物电阻抗测量用电极和肌肉电刺激用电极。因此,能缩短生物电阻抗测量用电极的前后之间的距离和肌肉电刺激用电极的前后之间的距离,即使是脚小的人也能使四个电极可靠地与脚接触。
153.图17是表示电极配置的第五变形例的图。在第五变形例的生物测量系统260中,分别在左上位置、右上位置、左下位置、右下位置处,在左右方向上的内侧配置有肌肉电刺激用电极267e、267f、267g、267h,在左右方向上的外侧配置有生物电阻抗测量用电极267a、267c、267b、267d。在本例中,生物电阻抗测量用电极的前后之间的距离和肌肉电刺激用电极的前后之间的距离相同,即使是脚小的人,也能使四个电极可靠地与脚接触。此外,生物电阻抗测量用电极的左右方向上的距离对测量精度没有影响,因此在本例中也得到与图16所示的第四例相同的效果。
154.通过以上的说明,公开了以下的生物测量系统和生物测量程序。
155.一个方案的生物测量系统具有具备如下部件的构成:介入确定部,确定对生物的物理刺激的介入的内容;生物测量部,测量所述生物的生物信息;以及输出部,输出以与由所述介入确定部确定的所述介入建立关联的方式由所述生物测量部测量到的所述生物信息或者基于所述生物信息的信息。
156.通过该构成,能知道由对生物的物理刺激的介入产生的生物的即时反应。需要说明的是,物理刺激可以是例如热刺激、力学刺激、光学刺激、电刺激、化学刺激、等离子体刺激。
157.在上述的生物测量系统中,所述生物测量部可以测量所述生物的生物电阻抗、体表面温度以及/或者体表面硬度作为所述生物信息。
158.通过该构成,能得到生物电阻抗、体表面温度以及/或者体表面硬度、或者基于它们的信息作为由对生物的物理刺激的介入产生的生物的反应。
159.上述的生物测量系统还可以具备介入装置,所述介入装置按照由所述介入确定部确定的所述介入的内容来进行所述对生物的物理刺激的介入。
160.通过该构成,能通过介入装置来进行对生物的物理刺激的介入,并且知道由该介入产生的生物的即时反应。
161.在上述的生物测量系统中,所述介入装置可以施加使所述生物的肌肉反射收缩的电刺激作为所述物理刺激的介入。
162.通过该构成,能知道进行了作为通过向肌肉施以电刺激而产生的被动运动的肌肉收缩运动时的生物的反应,即能知道由介入装置产生的被动运动的效果。施加使生物的肌
肉反射收缩的电刺激的装置典型为ems装置。
163.在上述的生物测量系统中,所述介入装置可以利用电极来对所述生物施加所述电刺激,所述生物测量部可以利用所述电极来测量所述生物的生物电阻抗作为所述生物信息。
164.通过该构成,能将用于施以用于被动运动的电刺激的电极用作用于测量生物电阻抗的电极。
165.在上述的生物测量系统中,所述介入装置可以利用电极来对所述生物施加所述电刺激,所述生物测量部可以利用与所述介入装置的所述电极不同的电极来测量所述生物的生物阻抗作为所述生物信息。
166.通过该构成,能将用于施以用于被动运动的电刺激的电极和用于测量生物电阻抗的电极设为不同的电极。
167.在上述的生物测量系统中,所述介入装置可以对所述生物施加力学刺激作为所述物理刺激的介入。
168.通过该构成,能知道由向肌肉、皮肤施以力学刺激的介入(例如,按摩)产生生物的反应,即知道由介入装置产生的按摩等的效果。
169.在上述的生物测量系统中,所述生物测量部可以测量对所述生物进行所述介入之前的介入前生物信息以及对所述生物进行了所述介入时的中途生物信息和/或介入后生物信息作为所述生物信息,所述输出部可以输出从所述介入前生物信息到所述中途生物信息和/或所述介入后生物信息的变化或者基于所述变化的信息。
170.通过该构成,能通过对生物的物理刺激的介入开始后的生物信息的变化来知道由该物理刺激产生的生物的反应。
171.上述的生物测量系统还可以具备通知装置,所述通知装置通知由所述介入确定部确定的所述介入的内容。
172.通过该构成,例如,在确定了规定的锻炼项目、按摩项目作为物理刺激的内容的情况下,通知部通知该锻炼项目、按摩项目,因此,用户能按照被通知的锻炼项目、按摩项目来进行锻炼、按摩。并且,生物测量部能测量进行这样的锻炼、按摩的用户的生物信息。
173.在上述的生物测量系统中,所述介入确定部可以按照用户的操作来确定所述介入的内容。
174.通过该构成,能知道针对由用户确定的介入内容的生物的反应。
175.一个方案的生物测量系统具有具备如下部件的构成:介入装置,进行对生物的物理刺激的介入;以及生物测量部,测量所述介入装置进行所述介入中途的所述生物的生物信息。
176.通过该构成,能获取介入中途的生物信息。
177.在上述的生物测量系统中,所述介入装置可以基于所述生物信息来确定所述介入的之后的内容。
178.通过该构成,能基于由物理刺激的介入产生的生物的实时的反应来动态地确定之后的介入内容。需要说明的是,确定之后的介入内容还包括停止介入。例如,可以进行如下控制:继续由介入装置进行的介入直至确认到充分的介入的效果,当观察到了充分的介入的效果时停止由介入装置进行的介入等。
179.在上述的生物测量系统中,所述介入装置可以是对所述生物的多个介入部位进行所述介入的装置,生物测量系统还可以具备介入确定部,所述介入确定部基于所述生物信息并按照每个所述介入部位来确定之后的介入的内容。
180.通过该构成,能基于生物信息并按照每个介入部位来确定介入内容。
181.一个方案的生物测量系统具有具备如下部件的构成:介入装置,进行对生物的物理刺激的介入;生物信息测量部,测量所述生物的生物信息;以及介入开始确定部,基于所述生物信息测量部在所述介入的结束后测量到的所述生物信息,确定由所述介入装置进行的对所述生物的下一个介入的开始定时。
182.通过该构成,能基于介入结束后的生物信息来确定下一个介入的开始定时。
183.一个方案的生物测量系统具有具备如下部件的构成:介入确定部,确定对生物的物理刺激的介入的内容;体组成运算部,对所述生物的体组成进行运算;以及存储部,以建立关联的方式存储所述体组成和所述介入的内容。
184.通过该构成,以建立关联的方式存储物理刺激的内容和施加了该物理刺激时的体组成,因此能通过一定程度的期间地反复进行该存储来知道该期间内的由物理刺激产生的体组成的变化或推移。
185.一个方案的生物测量程序具有使计算机作为介入确定部、生物测量部以及输出部而发挥功能的构成,所述介入确定部确定对生物的物理刺激的介入的内容,所述生物测量部测量所述生物的生物信息,所述输出部以与由所述介入确定部确定的所述介入建立关联的方式,输出由所述生物测量部测量到的所述生物信息或基于所述生物信息的信息。
186.一个方案的生物测量程序具有使计算机作为介入控制部和生物测量部而发挥功能的构成,所述介入控制部使介入装置进行对生物的物理刺激的介入,所述生物测量部测量所述介入装置进行所述介入中途的所述生物的生物信息。
187.一个方案的生物测量程序具有使计算机作为介入控制部、测量控制部以及介入开始确定部而发挥功能的构成,所述介入控制部使介入装置进行对生物的物理刺激的介入,所述测量控制部使生物测量装置测量所述生物的生物信息,所述介入开始确定部基于所述生物信息测量部在所述介入的结束后测量到的所述生物信息,确定由所述介入装置进行的对所述生物的下一个介入的开始定时。
188.一个方案的生物测量程序具有使计算机作为介入控制部、测量控制部以及存储控制部而发挥功能的构成,所述介入控制部使介入装置进行对生物的物理刺激的介入,所述测量控制部使生物测量装置对所述生物的体组成进行运算,所述存储控制部使存储装置以建立关联的方式存储所述体组成和所述介入的内容。
189.附图标记说明:
190.10:控制装置;11:介入控制部;12:测量控制部;13:输出控制部;14:评价运算部;15:存储控制部;20:存储装置;100、210、220、230、240、250、260:生物测量系统;101:显示面板;102:开始按钮;103:操作按钮;104:环境温度计;107:电极;108:体表面温度计;109:体表面硬度计;217a~217d、227a~227d、237a~237d、247a~247d、257a~257d、267a~267d:生物电阻抗测量用电极;217e~217f、227e~227f、237e~237h、247e~247h、257e~257h、267e~267h:肌肉电刺激用电极。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1